







前言
前面我说过STM32的定时器功能很强大,今天就来总结一下它的另外一个“强大”功能:TIM的比较输出功能,输出可调PWM波形。直接调用函数接口“TIM2_CH1_PWM(uint32_t Freq, uint16_t Dutycycle)”传入频率和占空比就能输出指定的波形。
我提供的软件工程直接调用是比较简单就能实现想要的PWM波形。但是,如果你是学习者,建议还是进去函数把每一个细节了解清楚,里面的东西可能对你掌握TIM很有帮助。
本着免费分享的原则,如果你觉得分享的内容对你有用,认可我分享的文章,就请用微信搜索“EmbeddDeveloper” 或者扫描下面二维码、关注,还有更多精彩内容等着你。

下载
文章提供的“软件工程”都是在硬件板子上进行多次测试、并保证没问题才上传至360云盘,请放心下载测试,如有问题请检查一下你的板子是否有问题。
ST标准外设库和参考手册、数据手册等都可以在ST官网下载,你也可以到我的360云盘下载。关于F0系列芯片的参考手册有多个版本(针对F0不同芯片),但有一个通用版本,就是“STM32F0x128参考手册V8(英文)2015-07”建议参考该手册,以后如果你换用一种型号芯片也方便了解。
今天的软件工程下载地址(360云盘):
https://yunpan.cn/cSitPxgQKsET5 访问密码
STM32F0xx的资料可以在我360云盘下载:
https://yunpan.cn/cS2PVuHn6X2Bj 访问密码 8c37
准备工作
建议准备F0的参考手册和数据手册,方便查找相关知识,没有的请到ST官网或到我360云盘下载。
今天总结的软件工程是基于“TIM基本延时配置详细过程”修改而来,因此需要将该软件工程下载准备好。今天学习的源代码主要添加在timer.c文件里面。
比较输出原理
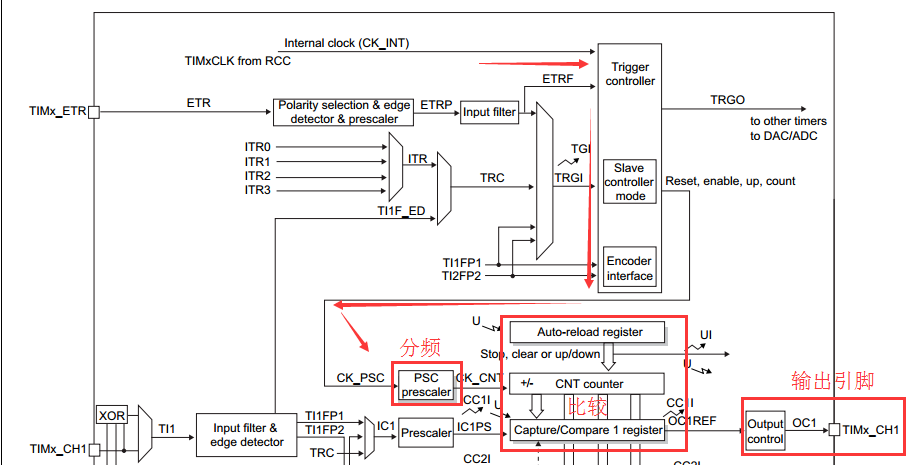
看下面框图,计数器的时钟从RCC处来,经过分频之后达到计数器,经过比较器进行比较,达到设定值,产生一个事件对应引脚翻转。主要就是这三个寄存器:重载值、计数值、比较值。说到这里若还不明白请仔细想一下。
配置过程详情
①RCC时钟
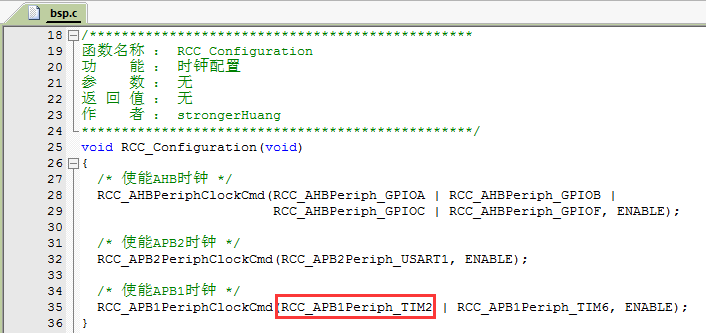
该函数位于bsp.c文件下面;
我个人习惯第一步配置时钟,ST官方提供的例程也是把配置时钟放在前面。关于RCC时钟的配置比较重要,有好几次我就是由于忘记配置相应RCC时钟,让我找了很久的问题,最后才发现是RCC时钟没有配置。
注意:
外设时钟不要随便添加,比如:RCC_APB1外设不要配置在RCC_APB2时钟里面【如:RCC_APB2PeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);这样能编译过,但是错误的】
我每次都提醒RCC时钟,是因为很多人就是因为时钟而导致软件运行有问题,所以,提醒更多人要注意配置RCC.
②输出引脚配置
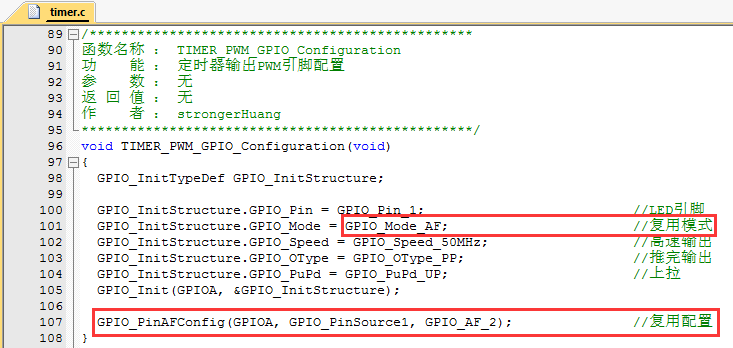
该函数位于timer.c文件下面;
注意:
复用功能必须配置好,上面两处,有一处没配置好,对应引脚都不会输出PWM波形。
③TIM比较输出配置
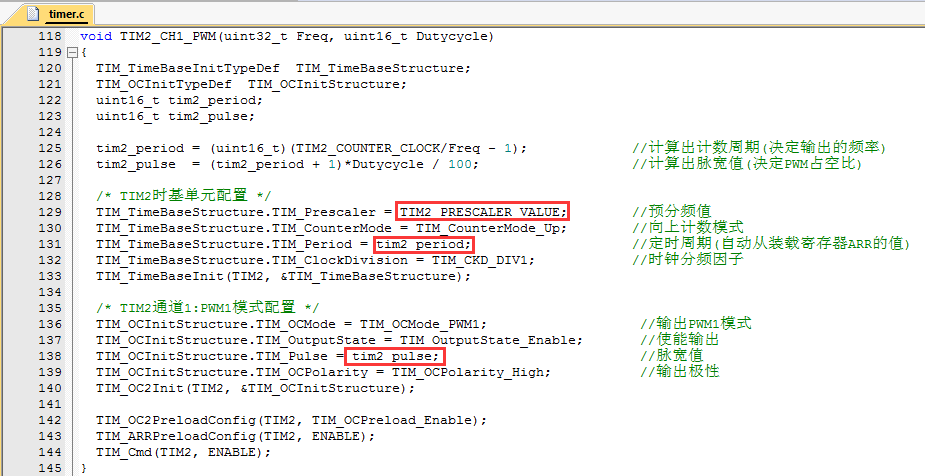
该函数位于timer.c文件下面;
注意:
决定输出频率和占空比主要由这三个参数(TIM2_PRESCALER_VALUE、tim2_period、tim2_pulse)决定的。
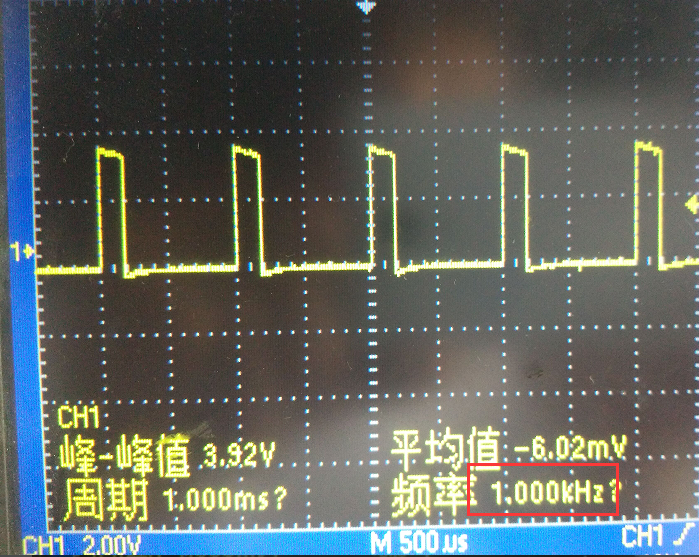
以今天工程输出1KHz,20%来举例说明:
TIM2_PRESCALER_VALUE = 72M / 36M - 1 = 1
tim2_period = 36000 - 1
tim2_pulse = 7200
这三个怎么得来的请看代码,今天工程输出的波形如下图:
④重点
A.细心研究过代码的人会发现TIM_OCMode_PWM1,还有一个TIM_OCMode_PWM2,这两个的区别是什么呢? 答案是:输出的极性(也就是方向)不一样。
这时候又有人问:那下面的输出极性TIM_OCPolarity_High与上面的关系是什么呢?答案是:这两个参数配合一起输出决定PWM波形的极性。
也就是说不同参数可以达到一样的效果,下图参数的配置同样可以输出一样的波形。
感兴趣的朋友可以试着修改测试一下效果。
B.今天的工程可以设置周期性中断(也就是1ms中断一次),感兴趣的朋友可以试着写一下。使用串口打印测试的话,尽量频率低一点,不然串口响应不过来。
说明
或许你硬件芯片不是提供工程里面的芯片,但是STM32F0的芯片软件兼容性很好,可以适用于F0其他很多型号的芯片,甚至是F2、F4等芯片上(具体请看手册、或者亲自测试)。
本文章提供的软件工程是基于ST标准外设库为基础建立而成,而非使用STM32CubeMX建立工程。个人觉得使用ST的标准外设库适合与学习者,STM32CubeMX建立工程结构复杂,对于学习者,特别是初学者估计会头疼。
今天的工程是基于工程“STM32F0xx_TIM基本延时配置详细过程”修改而来,以上实例总结仅供参考,若有不对之处,敬请谅解。
最后
如果你喜欢我分享的内容,你又想了解更多相关内容,请关注文章开头的微信公众号,新内容持续更新中,后期将会有更多精彩内容出现。
















 2003
2003

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











