






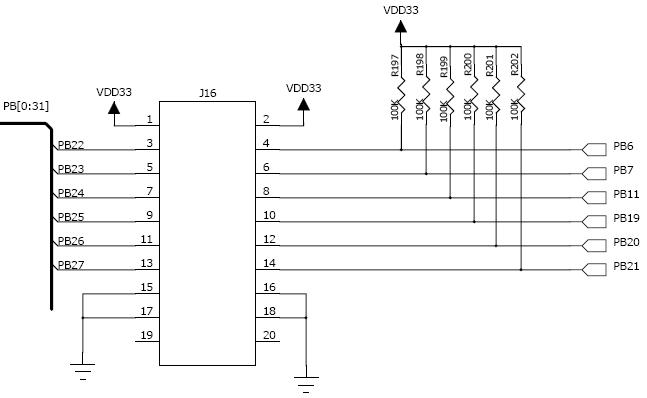
1.原理图
2.代码

 这篇博客详细介绍了如何在AT91SAM9263平台上开发Windows CE 6.0 R2的6X6矩阵键盘驱动。内容涵盖了驱动原理、中断处理、消除抖动的算法以及具体的中断线程实现。通过示例代码展示了如何初始化和处理不同中断线程,将按键映射到虚拟按键,并利用`keybd_event`发送键盘事件。
这篇博客详细介绍了如何在AT91SAM9263平台上开发Windows CE 6.0 R2的6X6矩阵键盘驱动。内容涵盖了驱动原理、中断处理、消除抖动的算法以及具体的中断线程实现。通过示例代码展示了如何初始化和处理不同中断线程,将按键映射到虚拟按键,并利用`keybd_event`发送键盘事件。
1.原理图
2.代码
 2312
2312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















