







 本文详细介绍了基于51单片机的霍尔测速直流电机控制系统,涉及硬件组成、软件设计、控制原理和实现过程。重点讨论了单片机编程、霍尔传感器信号处理、电机控制算法及使用AltiumDesigner和Protues进行软件和硬件仿真。
本文详细介绍了基于51单片机的霍尔测速直流电机控制系统,涉及硬件组成、软件设计、控制原理和实现过程。重点讨论了单片机编程、霍尔传感器信号处理、电机控制算法及使用AltiumDesigner和Protues进行软件和硬件仿真。
**单片机设计介绍,基于51单片机霍尔测速直流电机控制设计
一 概要
基于51单片机霍尔测速直流电机控制设计是一个综合性的项目,它结合了单片机编程、霍尔传感器测速以及直流电机控制等多个方面。以下是对这一设计的概要介绍:
一、设计概述
该设计旨在利用51单片机实现对直流电机的精确控制,并通过霍尔传感器进行测速,实现速度的实时监测与反馈。通过单片机编程,可以控制电机的启动、停止、加速、减速等动作,同时根据霍尔传感器的反馈信号调整电机的转速,达到预定的速度目标。
二、硬件组成
51单片机:作为控制核心,负责接收和处理霍尔传感器的信号,以及控制直流电机的动作。
霍尔传感器:安装在电机的旋转轴上,用于测量电机的转速。当电机旋转时,磁场变化会导致霍尔传感器输出电压的变化,这个电压信号可以被单片机读取并转换为电机的速度。
直流电机:作为被控对象,接受单片机的控制信号,实现相应的动作。
电源与驱动电路:为单片机和电机提供稳定的电源,并通过驱动电路将单片机的控制信号转换为电机可以识别的驱动信号。
三、软件设计
单片机编程:使用C语言或汇编语言编写单片机的控制程序。程序需要包括初始化设置、中断处理、速度计算与控制等功能。
霍尔传感器信号处理:编写程序读取霍尔传感器的输出信号,并将其转换为电机的速度值。同时,需要设置合适的中断触发条件,以便实时响应霍尔传感器的变化。
电机控制算法:根据设定的速度目标和实际速度反馈,设计合适的控制算法(如PID算法)来调整电机的转速。算法需要考虑到电机的动态性能和稳定性要求。
四、实现过程
搭建硬件平台:将51单片机、霍尔传感器、直流电机等硬件按照设计要求进行连接和搭建。
编写并调试程序:在编程环境中编写单片机的控制程序,并进行调试和优化,确保程序的正确性和稳定性。
进行测试与验证:在实际环境中对系统进行测试,验证其测速和控制性能是否达到预期目标。
通过以上步骤,可以完成基于51单片机霍尔测速直流电机控制设计的实现。这一设计在实际应用中具有广泛的用途,如工业自动化、机器人控制、智能车辆等领域。
二、功能设计
本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。本文中采用了三极管组成了PWM信号的驱动系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。另外,本系统中使用了霍尔元件对直流电机的转速进行测量,经过处理后,将测量值送到液晶显示出来。
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。
三、 软件设计
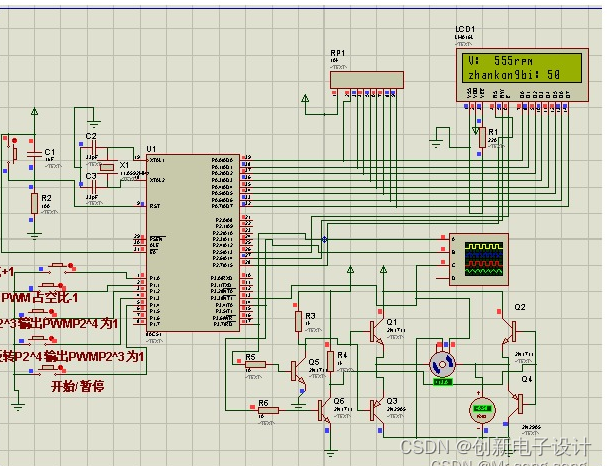
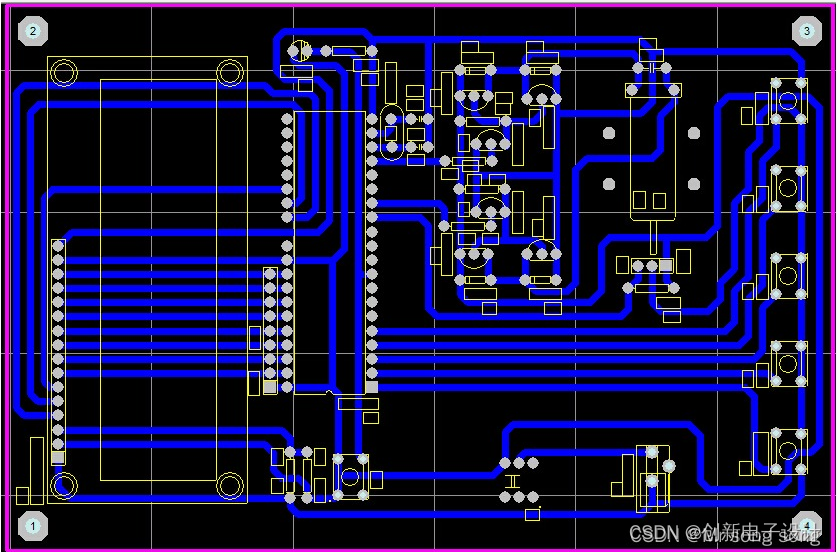
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图
五、 程序
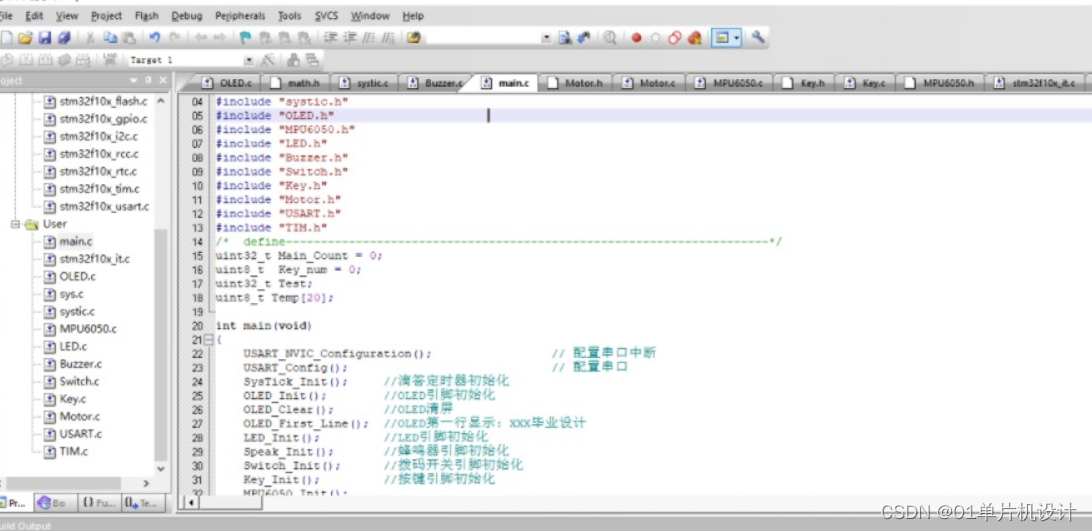
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25















 583
583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









