






毕设帮助、开题指导、技术解答(有偿)见文末。
目录
摘要
在运动控制系统中,电机转速控制占有至关重要的作用,其控制算法和手段有很多,模拟PID控制是最早发展起来的控制策略之一,长期以来形成了典型的结构,并且参数整定方便,能够满足一般控制的要求,但由于在模拟PID控制系统中,参数一旦整定好后,在整个控制过程中都是固定不变的,而在实际中,由于现场的系统参数、温度等条件发生变化,使系统很难达到最佳的控制效果,因此采用模拟PID控制器难以获得满意的控制效果。随着计算机技术与智能控制理论的发展,数字PID技术渐渐发展起来,它不仅能够实现模拟PID所完成的控制任务,而且具备控制算法灵活、可靠性高等优点,应用面越来越广。
本设计以上面提到的数字PID为基本控制算法,以AT89C52单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。在系统中采用7289作为显示部件,通过4×4键盘设置P、I、D、V四个参数转控制,启动后可以通过显示部件了解电机当前的转速。该系统控制精度高,具有很强的抗干扰能力。
关键词:PID,PWM脉冲,占空比,无静差调节
一、硬件方案
单片机的电机PID调速控制系统设计的实现主要有电源5V供电、LCD 1602显示屏模块、单片机最小系统、独立按键模块、蜂鸣器报警等、霍尔传感器模块。
二、设计功能
1.本设计采用STC89C51/52(与AT89S51/52、AT89C51/52通用,可任选)单片机作为主控制器
2.采用霍尔传感器非接触式测电机转速
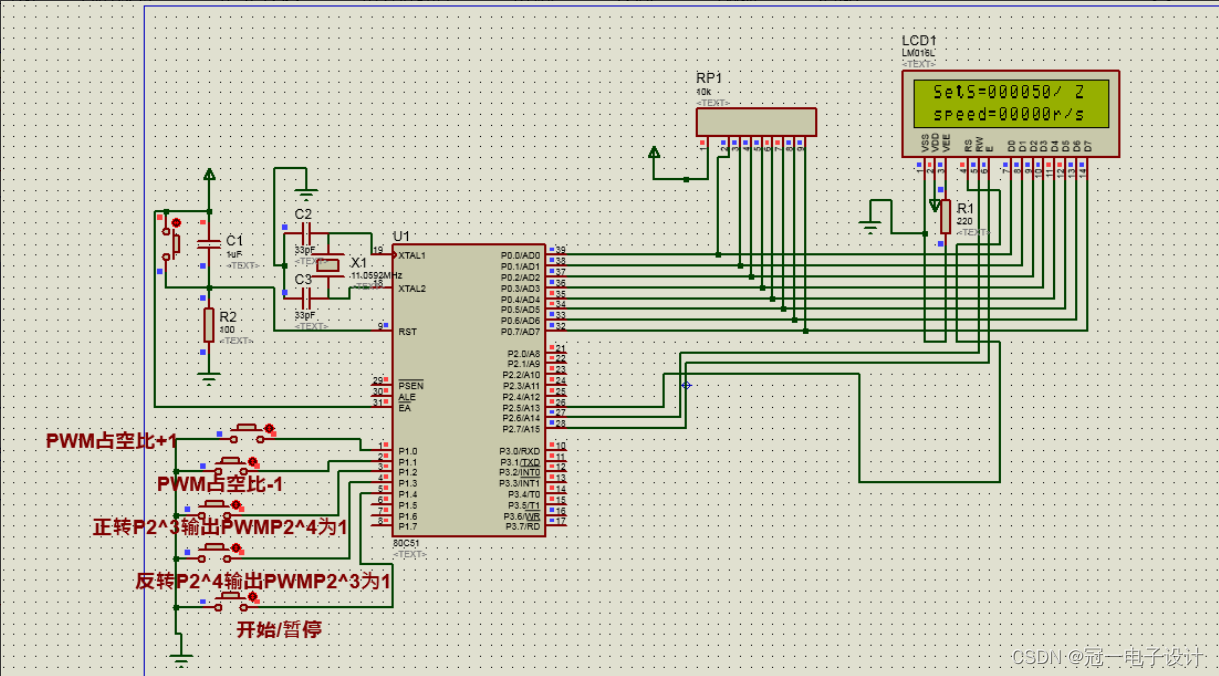
3.LCD1602液晶显示当前的转速,转速单位为转/分(RPM)。和显示当前的pwm占空比0~100%。
4.电机的速度可以通过按键调整,也可以开始暂停,正转和反转。
三、实物图

四、原理图

五、PCB图

六、Protues仿真
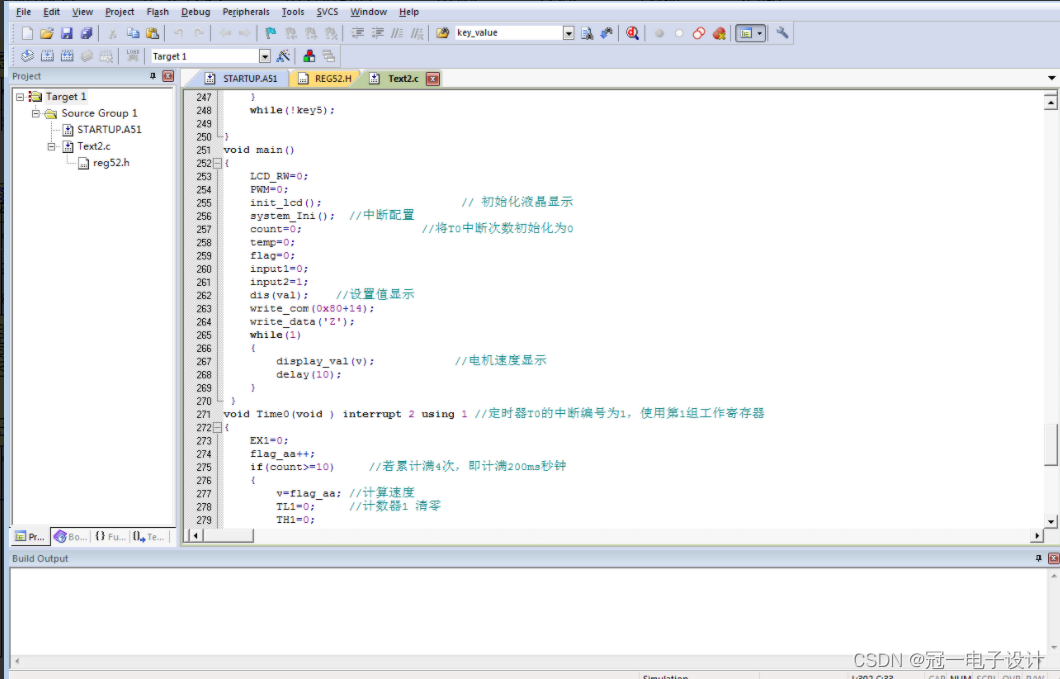
七、程序
八、资料包括

需要完整的资料可以点击下面的名片,找我要资源压缩包的百度网盘下载地址及提取码。
















 2707
2707











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











