






之前跟人做了一个平衡车,但是是使用的HAL库,我一开始学习使用的是标准库,跟着江科大学习的。所以,我一直准备用标准库实现一次,这几天学习了MPU6050的姿态解算,学习了一下四元数,欧拉角。
我的理解就是,使用欧拉角进行计算时,会出现多解。
A` = 旋转矩阵*A,进行公示求解时,
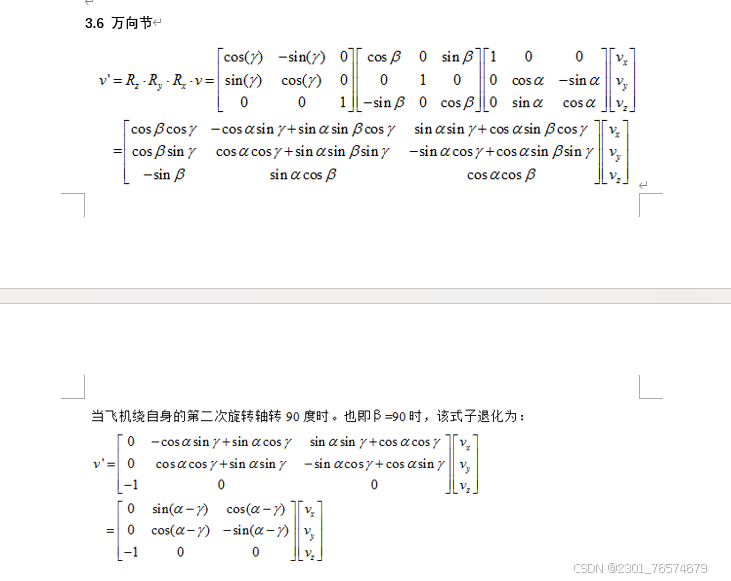
当出现90度时,cos90 = 0
所以旋转矩阵会退化,只要第二次出现90度时,只要a - y 的值定了,那么任何角都是一样的,所以会出现 【30 90 60】和【40 90 70】是一样的。
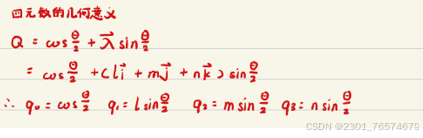
所以,引入四元数
q = q0 + q1i +q2j +a3k, 具体公式网上都有的,我们这里主要使用
![]()
后面就是一系列计算,算出欧拉角了
附上我的代码
江科大的I2C我只修改了引脚,和启用PB3和PB4的i/o功能
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //JTAG-DP 禁用 + SW-DP 使能。只将PA15 ,PB3 ,PB4变成普通IO口。
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);//默认是低电平
GPIO_SetBits(GPIOB,GPIO_Pin_4|GPIO_Pin_3);
}#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
uint8_t FLAG;
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1,0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2,0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV,0x04); //采样率分频寄存器,配置采样率 1000/(4+1) = 100
MPU6050_WriteReg(MPU6050_CONFIG,0x06); //配置寄存器,配置DLPF 设置数字低通滤波器(DLPF)
MPU6050_WriteReg(MPU6050_GYRO_CONFIG,0x00); //陀螺仪配置寄存器,选择满量程为±250°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG,0x00); //加速度计配置寄存器,选择满量程为±2g
// 配置中断为低电平有效
MPU6050_WriteReg(MPU6050_INT_PIN_CFG, 0x80); // INT 低电平有效,推挽输出
MPU6050_WriteReg(MPU6050_INT_ENABLE, 0x01); // 启用 Data Ready 中断
//配置外部中断(INT引脚触发)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitTypeStrcutrue;
GPIO_InitTypeStrcutrue.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitTypeStrcutrue.GPIO_Pin = GPIO_Pin_5;
GPIO_InitTypeStrcutrue.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitTypeStrcutrue);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource5);
EXTI_InitTypeDef EXTI_InitTypeStruct;
EXTI_InitTypeStruct.EXTI_Line = EXTI_Line5;
EXTI_InitTypeStruct.EXTI_LineCmd = ENABLE;
EXTI_InitTypeStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitTypeStruct.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitTypeStruct);
//配置NVIC
NVIC_InitTypeDef NVIC_InitTypeStrcut;
NVIC_InitTypeStrcut.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitTypeStrcut.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitTypeStrcut.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitTypeStrcut.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitTypeStrcut);
}
uint8_t MPU_GetFlag(void)
{
if(FLAG == 1)
{
FLAG = 0;
return 1;
}
return 0;
}
//中断函数
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line5) != RESET)
{
//进行PID
FLAG = 1;
// 清除中断标志位
EXTI_ClearITPendingBit(EXTI_Line5);
}
}
#include "stm32f10x.h"
#include "MPU6050.h"
#include "math.h"
#define RtA (57.2957795f) // 弧度转角度,180/π ≈ 57.2957795
#define Ki 0.005f // 积分系数
#define DT 0.005f // 计算周期的一半,单位s
// 加速度和角速度
int16_t AX, AY, AZ, GX, GY, GZ;
typedef struct {
float c1, c2, c3, a1, a2, a3, a;
} Degree;
Degree d;
typedef struct {
float q0, q1, q2, q3;
float exInt, eyInt, ezInt;
} Quater;
Quater q = {1.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f};
void Dmp_Init(void) {
MPU6050_Init();
}
void MPU6050_Read(void) {
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
// 转换为物理量
d.c1 = GX / 131.0f; // 角速度(°/s)
d.c2 = GY / 131.0f;
d.c3 = GZ / 131.0f;
// 转换为rad/s
d.c1 /= RtA;
d.c2 /= RtA;
d.c3 /= RtA;
d.a1 = AX / 16384.0f; // 加速度(g)
d.a2 = AY / 16384.0f;
d.a3 = AZ / 16384.0f;
// 加速度归一化
float norm = sqrtf(d.a1 * d.a1 + d.a2 * d.a2 + d.a3 * d.a3);
if (norm > 1e-6f) { // 防止除零
float inv_norm = 1.0f / norm;
d.a1 *= inv_norm;
d.a2 *= inv_norm;
d.a3 *= inv_norm;
d.a = 1.0f;
} else {
d.a = 0.0f;
}
}
void ComputeEulerAngles(float *pitch, float *roll, float *yaw) {
MPU6050_Read();
// 计算姿态误差
float gx = d.c1, gy = d.c2, gz = d.c3;
float gravity_x = 2.0f * (q.q1 * q.q3 - q.q0 * q.q2);
float gravity_y = 2.0f * (q.q0 * q.q1 + q.q2 * q.q3);
float gravity_z = q.q0*q.q0 - q.q1 * q.q1 - q.q2 * q.q2 + q.q3*q.q3;
float error_x = d.a2 * gravity_z - d.a3 * gravity_y;
float error_y = d.a3 * gravity_x - d.a1 * gravity_z;
float error_z = d.a1 * gravity_y - d.a2 * gravity_x;
// 更新四元数
float Kp = 0.5f;
// 误差积分
q.exInt += Ki * error_x ;
q.eyInt += Ki * error_y ;
q.ezInt += Ki * error_z ;
// 修正角速度
gx += Kp * error_x + q.exInt;
gy += Kp * error_y + q.eyInt;
gz += Kp * error_z + q.ezInt;
// 四元数微分方程
float q0_dot = (-q.q1 * gx - q.q2 * gy - q.q3 * gz) * DT;
float q1_dot = (q.q0 * gx - q.q3 * gy + q.q2 * gz) * DT;
float q2_dot = (q.q3 * gx + q.q0 * gy - q.q1 * gz) * DT;
float q3_dot = (-q.q2 * gx + q.q1 * gy + q.q0 * gz) * DT;
// 更新四元数
q.q0 += q0_dot;
q.q1 += q1_dot;
q.q2 += q2_dot;
q.q3 += q3_dot;
// 归一化
float norm = sqrtf(q.q0 * q.q0 + q.q1 * q.q1 + q.q2 * q.q2 + q.q3 * q.q3);
if (norm > 1e-6f) {
float inv_norm = 1.0f / norm;
q.q0 *= inv_norm;
q.q1 *= inv_norm;
q.q2 *= inv_norm;
q.q3 *= inv_norm;
}
// 计算欧拉角
float q0q0 = q.q0 * q.q0;
float q1q1 = q.q1 * q.q1;
float q2q2 = q.q2 * q.q2;
float q3q3 = q.q3 * q.q3;
*roll = atan2f(2.0f * (q.q2 * q.q3 + q.q0 * q.q1), q0q0 - q1q1 - q2q2 + q3q3);
*pitch = asinf(-2.0f * (q.q1 * q.q3 - q.q0 * q.q2));
*yaw = atan2f(2.0f * (q.q1 * q.q2 + q.q0 * q.q3), q0q0 + q1q1 - q2q2 - q3q3);
// // 转换为度
// *roll *= RtA;
// *pitch *= RtA;
// *yaw *= RtA;
}
如果想更好的理解我建议看一下这个视频 视频连接

















 915
915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









