






实践制作DIY- GC0060-直流电机PID速度控制
一、功能说明:
基于51单片机设计-直流电机PID速度控制
二、功能介绍:
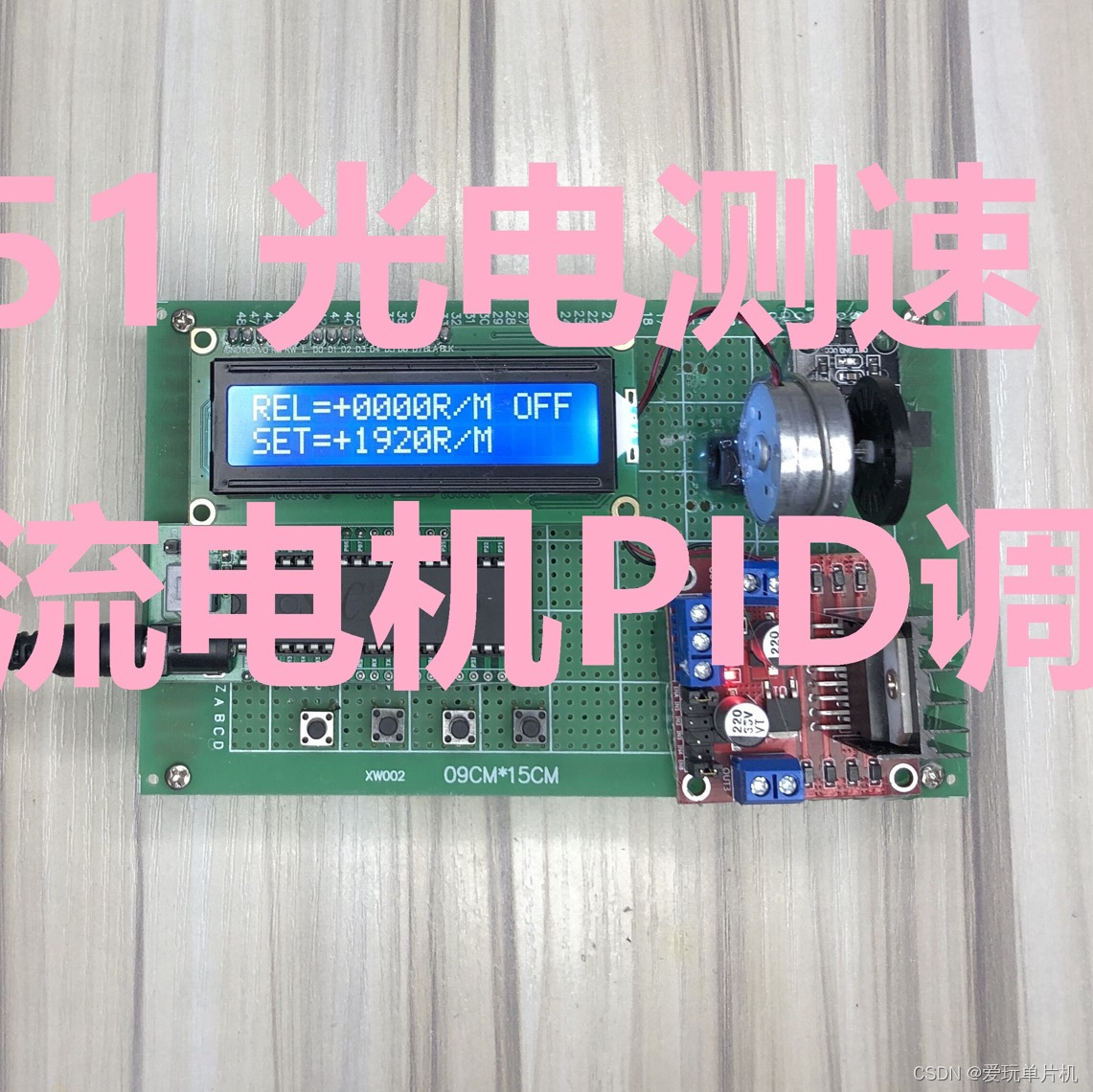
STC89C52单片机+LCD1602+直流电机+光栅转盘+光电传感器+L298N驱动模块+4个按键(速度减、速度加、开/关、正转/反转)
1.直流电机安装光栅转盘配合红外光电传感器可以准确输出电机的速度信号,通过单片机采集速度,实时显示在LCD1602上面xxxxRPM(也就是转每分钟)。
2.通过按键设定目标速度,然后通过PID算法输出PWM信号精确控制电机速度。
3.按键设定目标速度范围(0~3600转每分钟),按键点击一次+60或者-60转每分钟。
4.有一个开关键,进行开关,打开后按照设定速度运行。关闭后停止。
5.有一个正转/反转键,按下后可以控制电机正转或者反转,对应LCD1602速度显示‘+’或者‘-’表示正反。三、详情介绍:
视频讲解:哔哩哔哩搜索UP主“爱搞单片机”在其空间搜索关键词“直流电机PID速度控制”观看该视频详解讲解
功能演示操作:
这是一款基于51单片机直流电机PID速度控制。STC89C52单片机+LCD1602+直流电机+光栅转盘+光电传感器+L298N驱动模块+4个按键(速度减、速度加、开/关、正转/反转)。直流电机安装光栅转盘配合红外光电传感器可以准确输出电机的速度信号,通过单片机采集速度,实时显示在LCD1602上面xxxxRPM(也就是转每分钟)。通过按键设定目标速度,然后通过PID算法输出PWM信号精确控制电机速度。按键设定目标速度范围(0~3600转每分钟),按键点击一次+60或者-60转每分钟。有一个开关键,进行开关,打开后按照设定速度运行。关闭后停止。有一个正转/反转键,按下后可以控制电机正转或者反转,对应LCD1602速度显示‘+’或者‘-’表示正反。
具体测试方法观看视频详细介绍。。。

了解更多尽请观看视频讲解。。。















 1721
1721











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









