






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
实际-有功-无功控制器的动态性能
两级电压源变流器(VSC)
采用电流控制的实际/无功功率控制器
利用阿尔法-贝塔转换进行电流反馈。
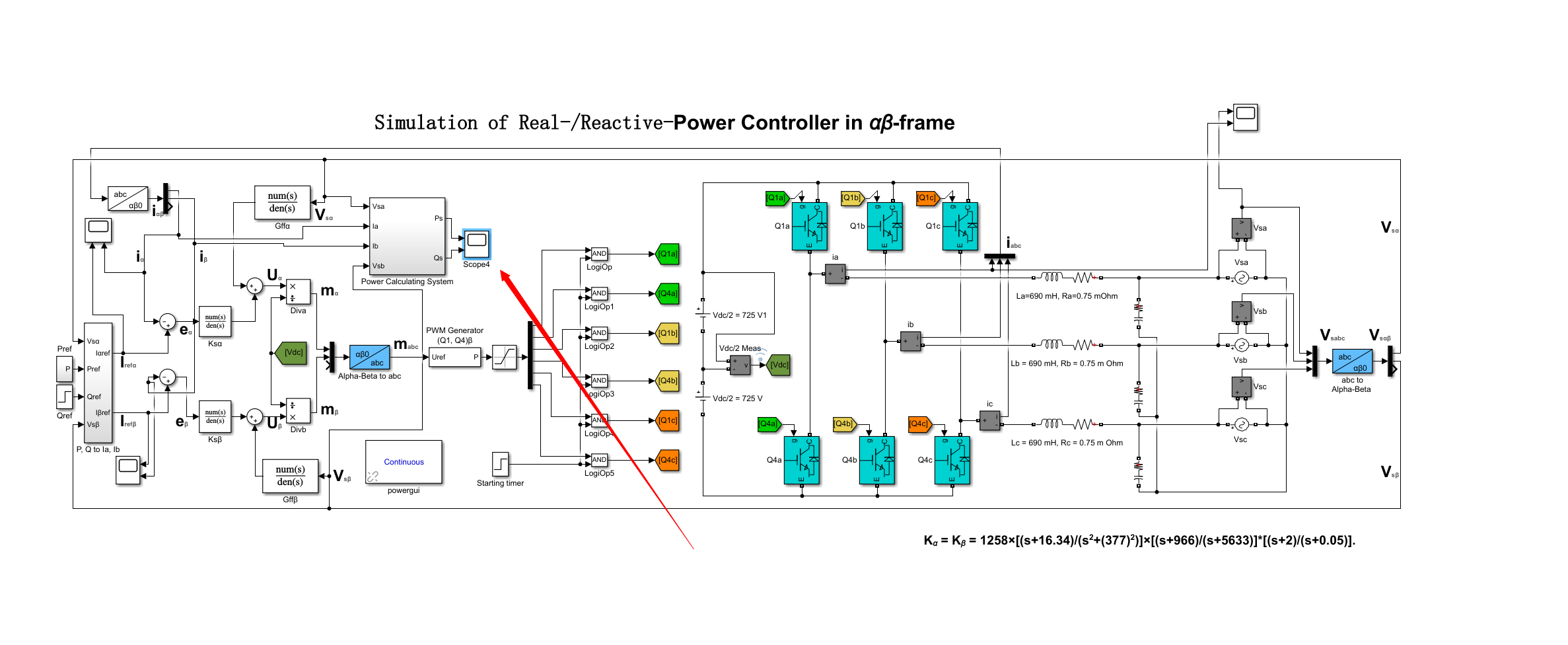
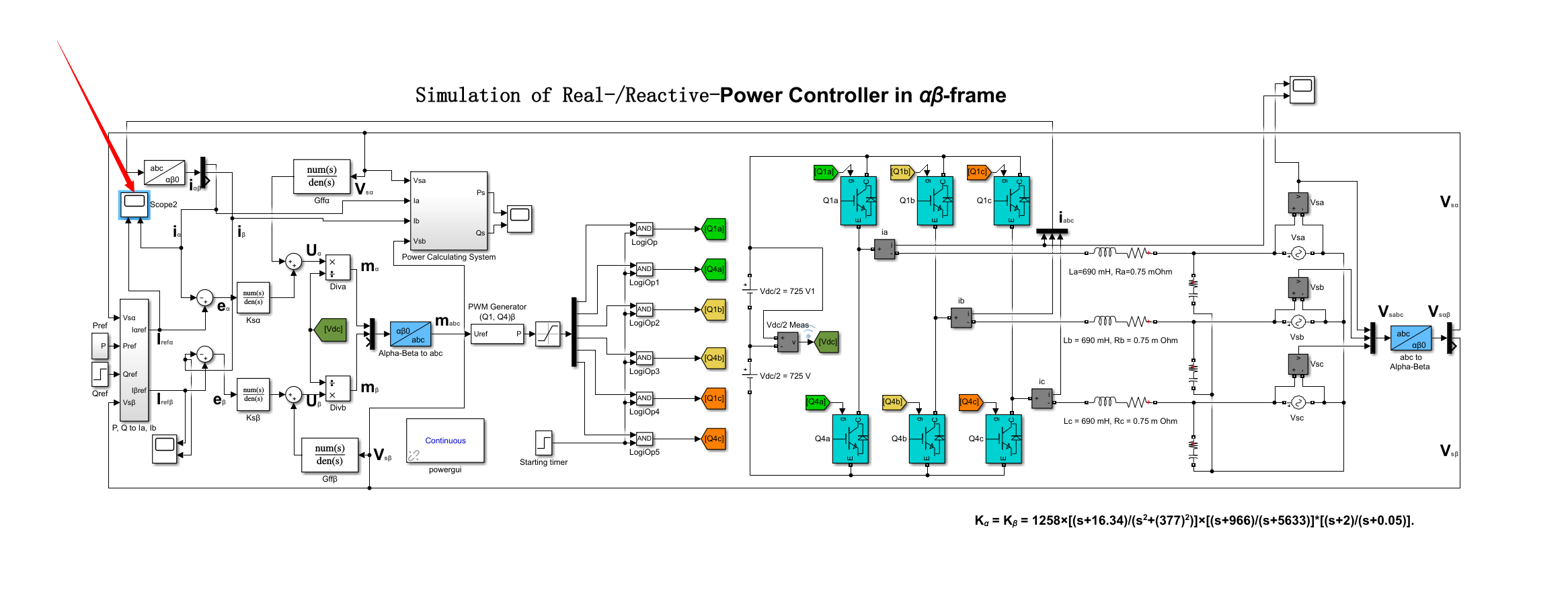
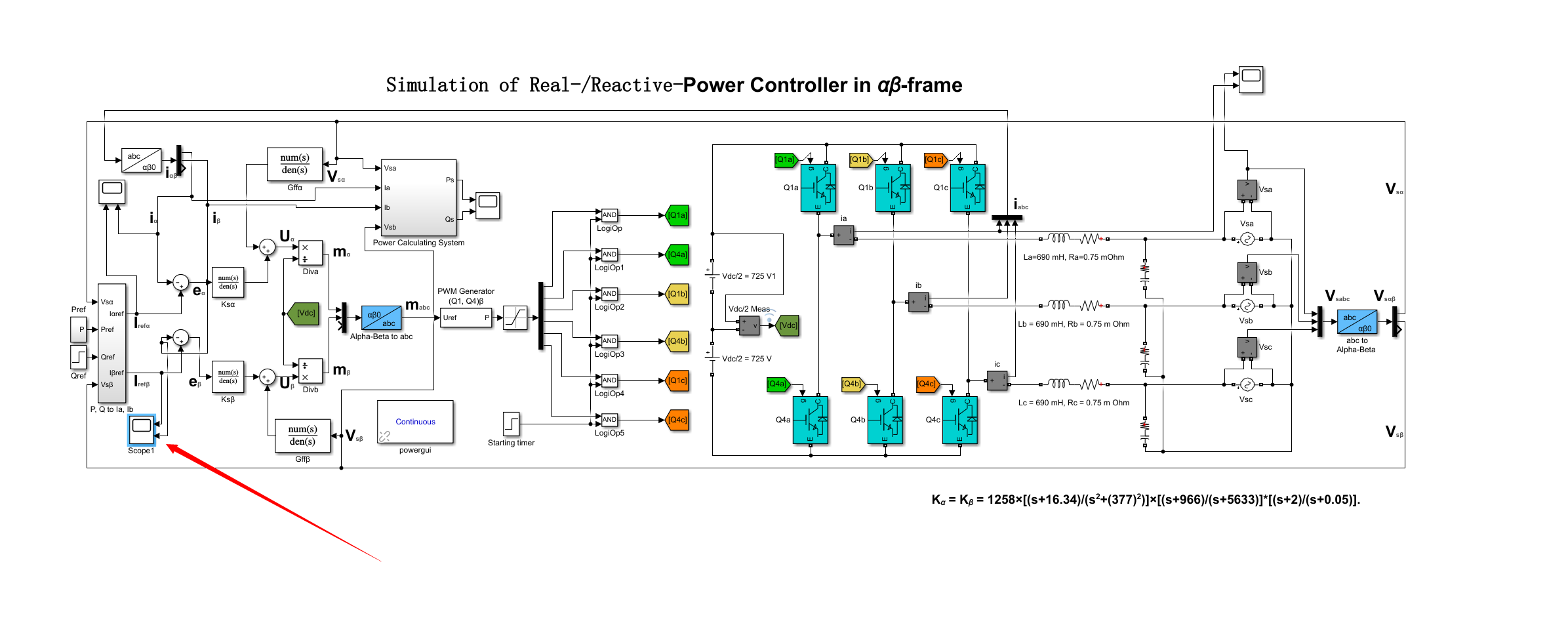
根据示例7.1的结果和电流控制的实时/无功功率控制器的模拟结果:图1展示了一个电流控制的实时/无功功率控制器的原理图。
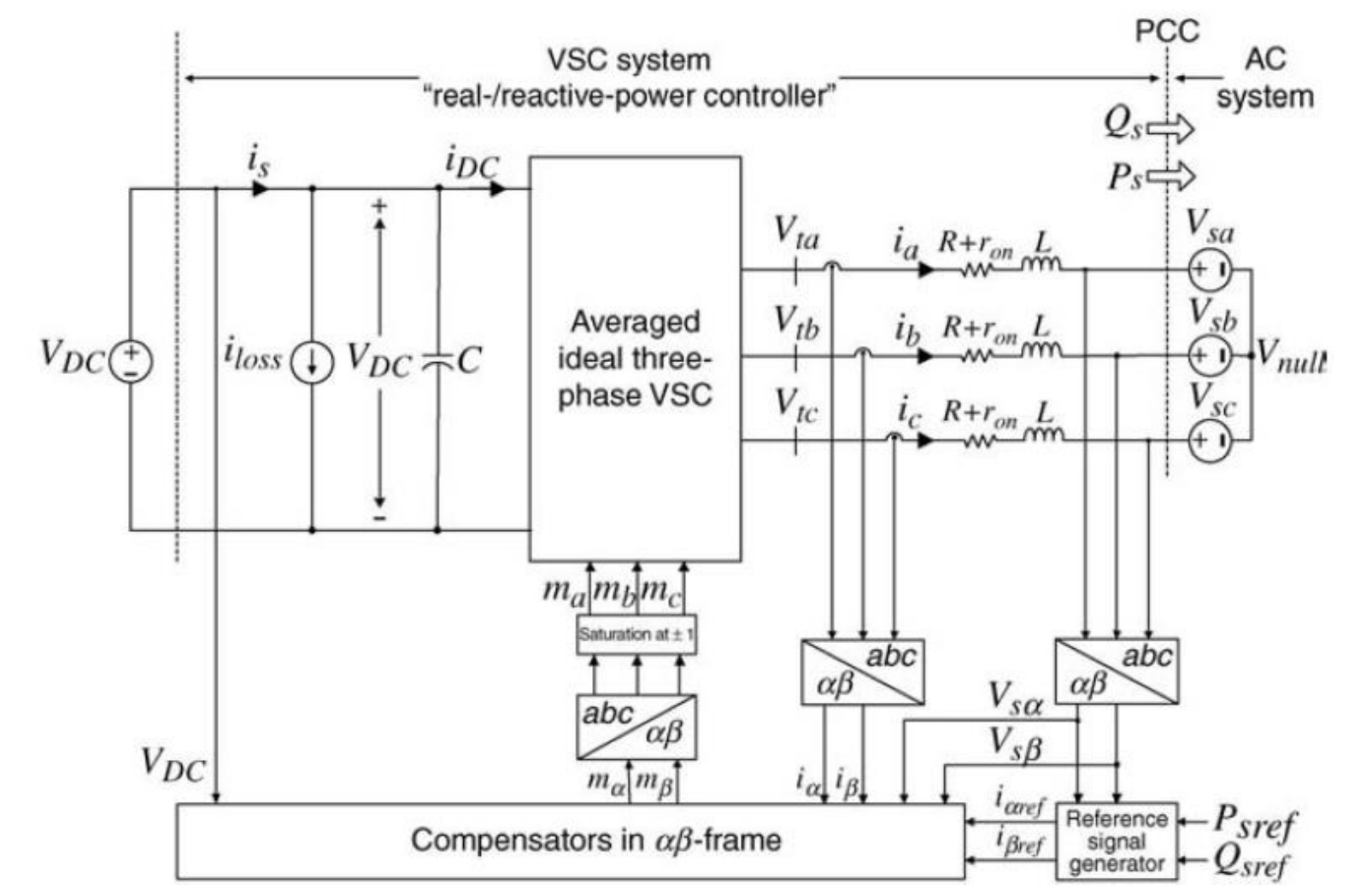
图2展示了αβ框架到abc框架和abc框架到αβ框架的转换块。
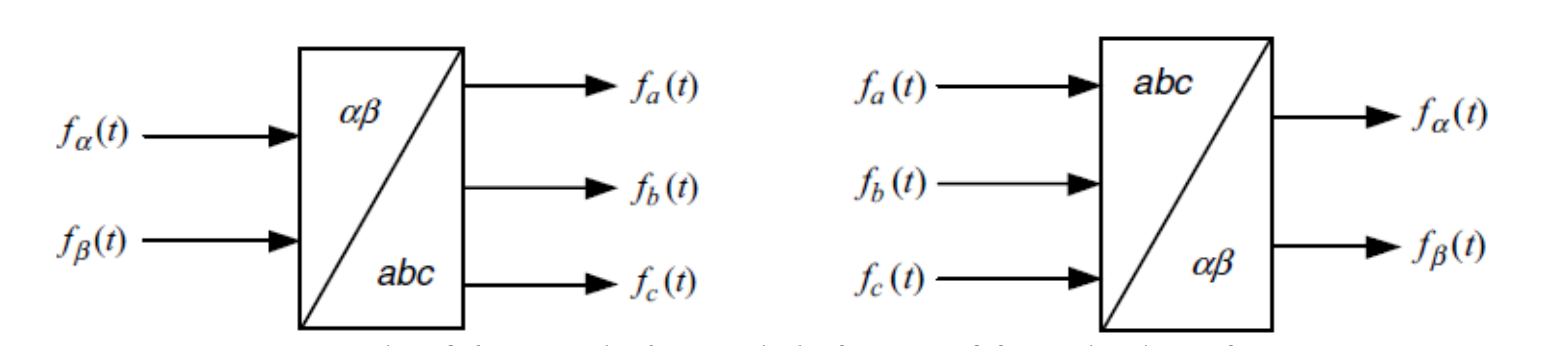
图3展示了在MATLAB中用于示例7.1模拟的非理想两电平VSC的原理图。
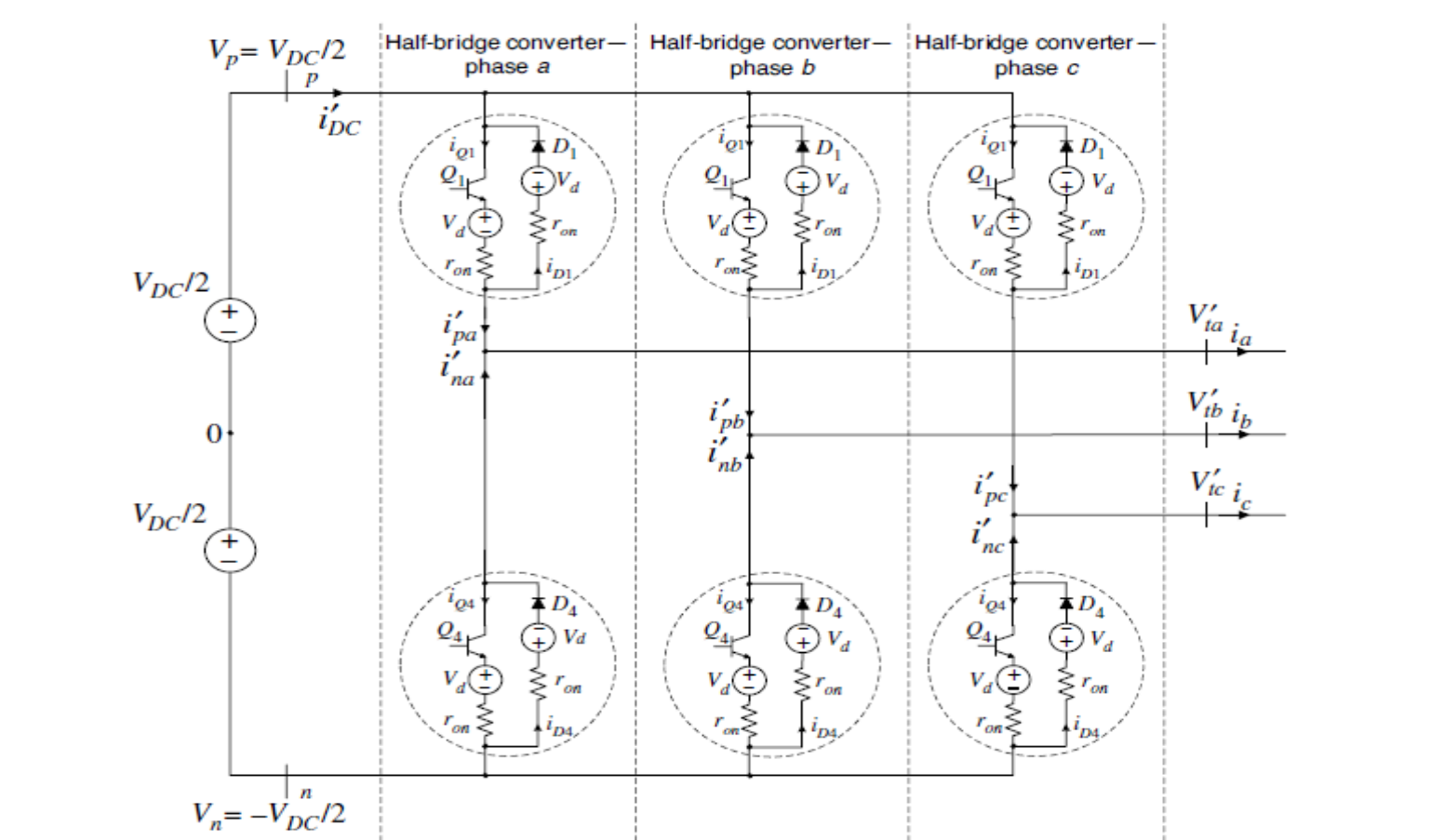
图4展示了图1中的实/无功功率控制器的控制块图。
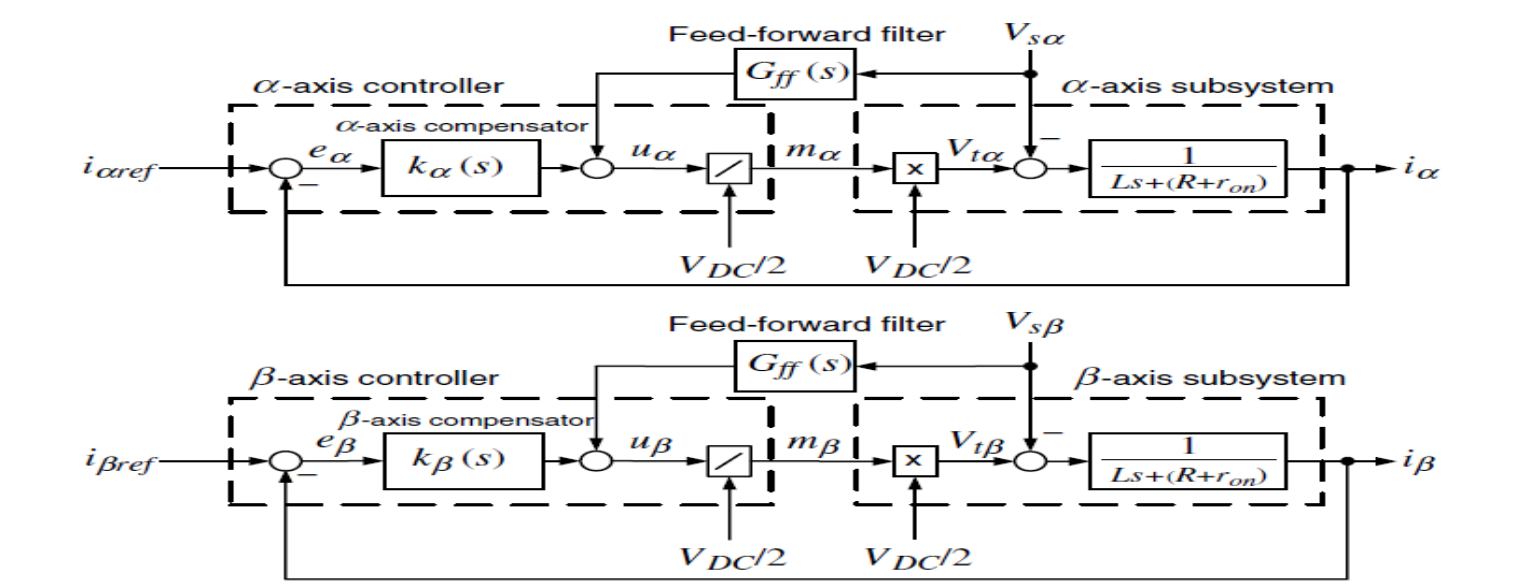
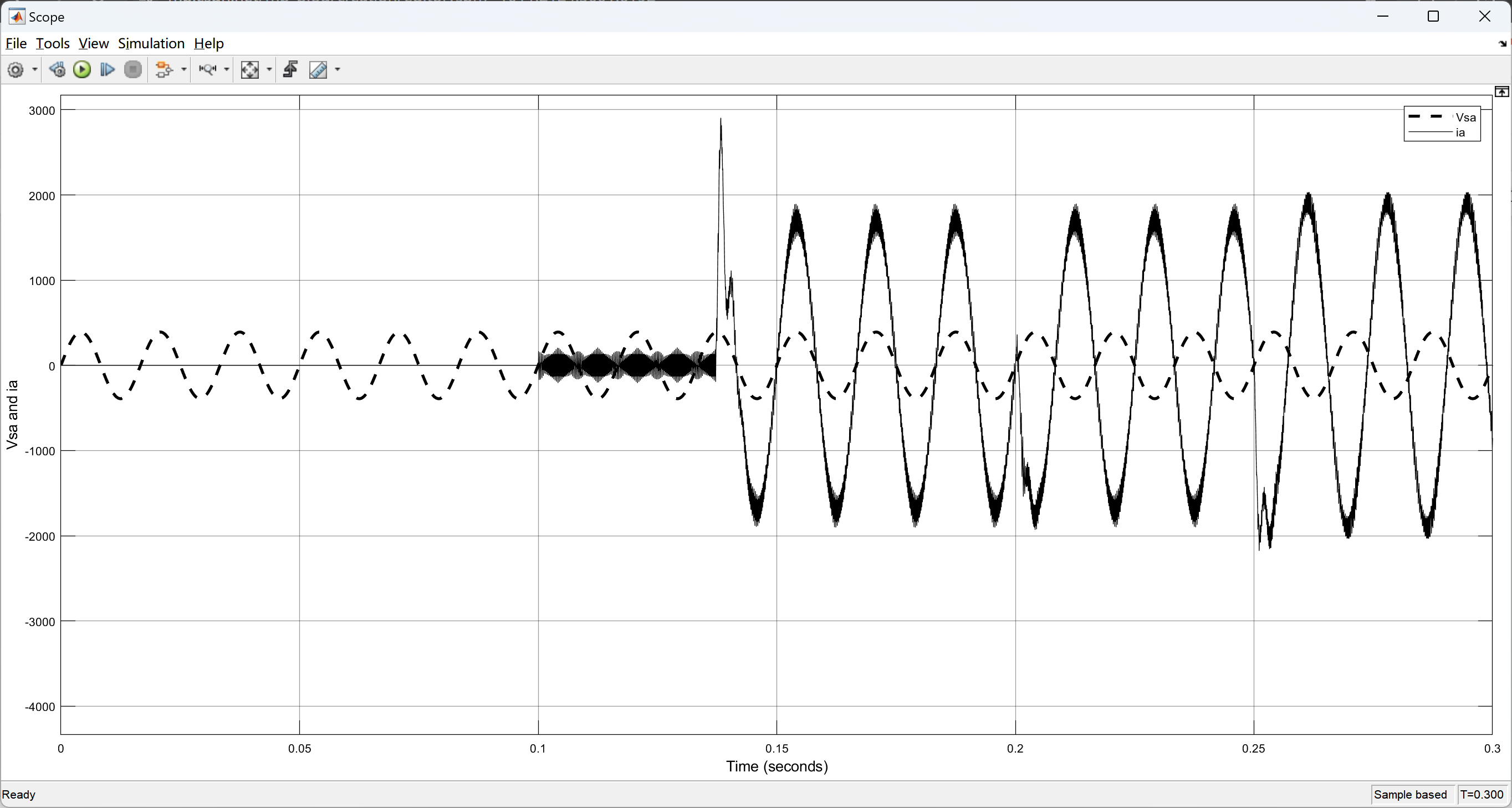
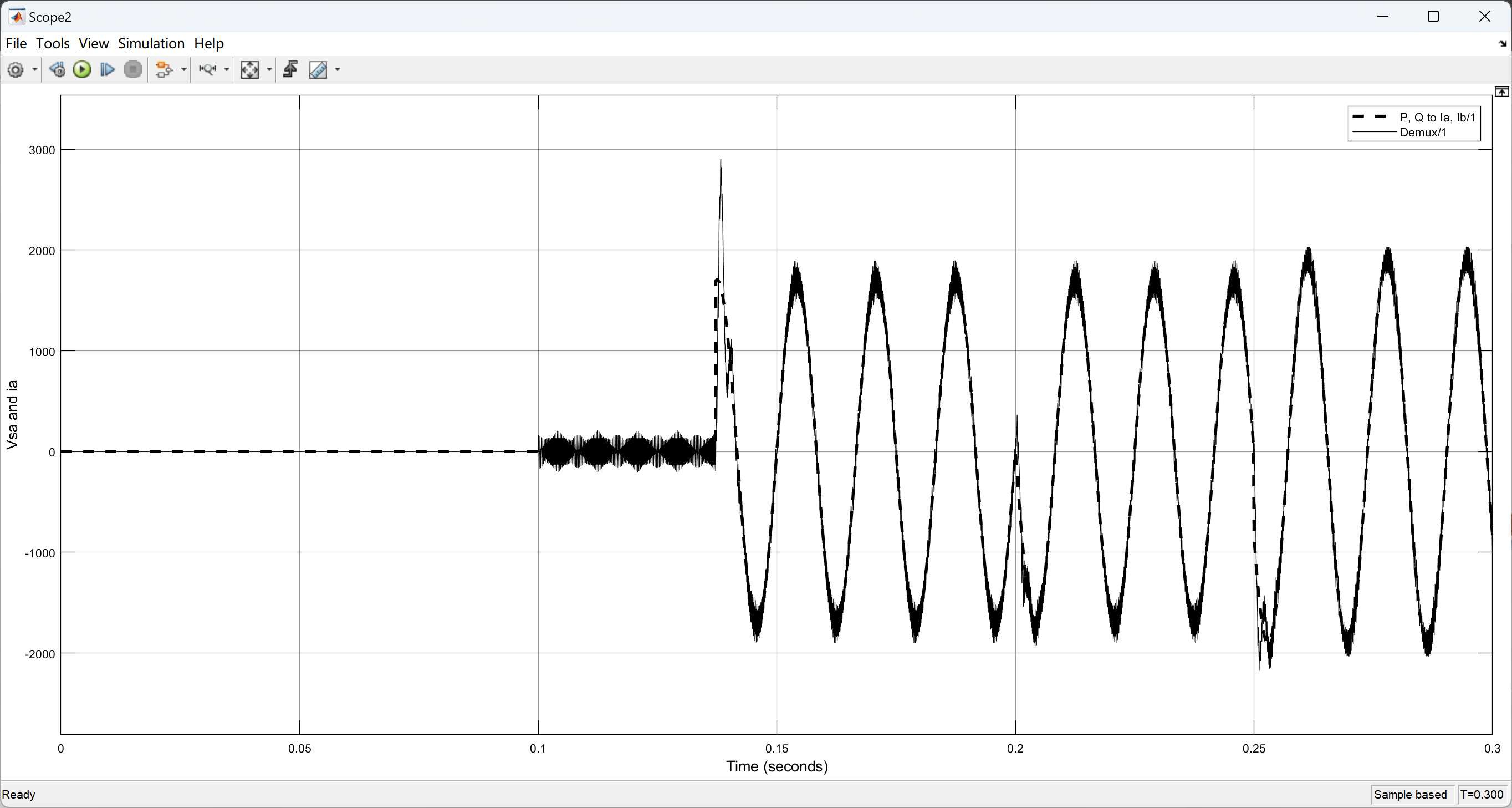
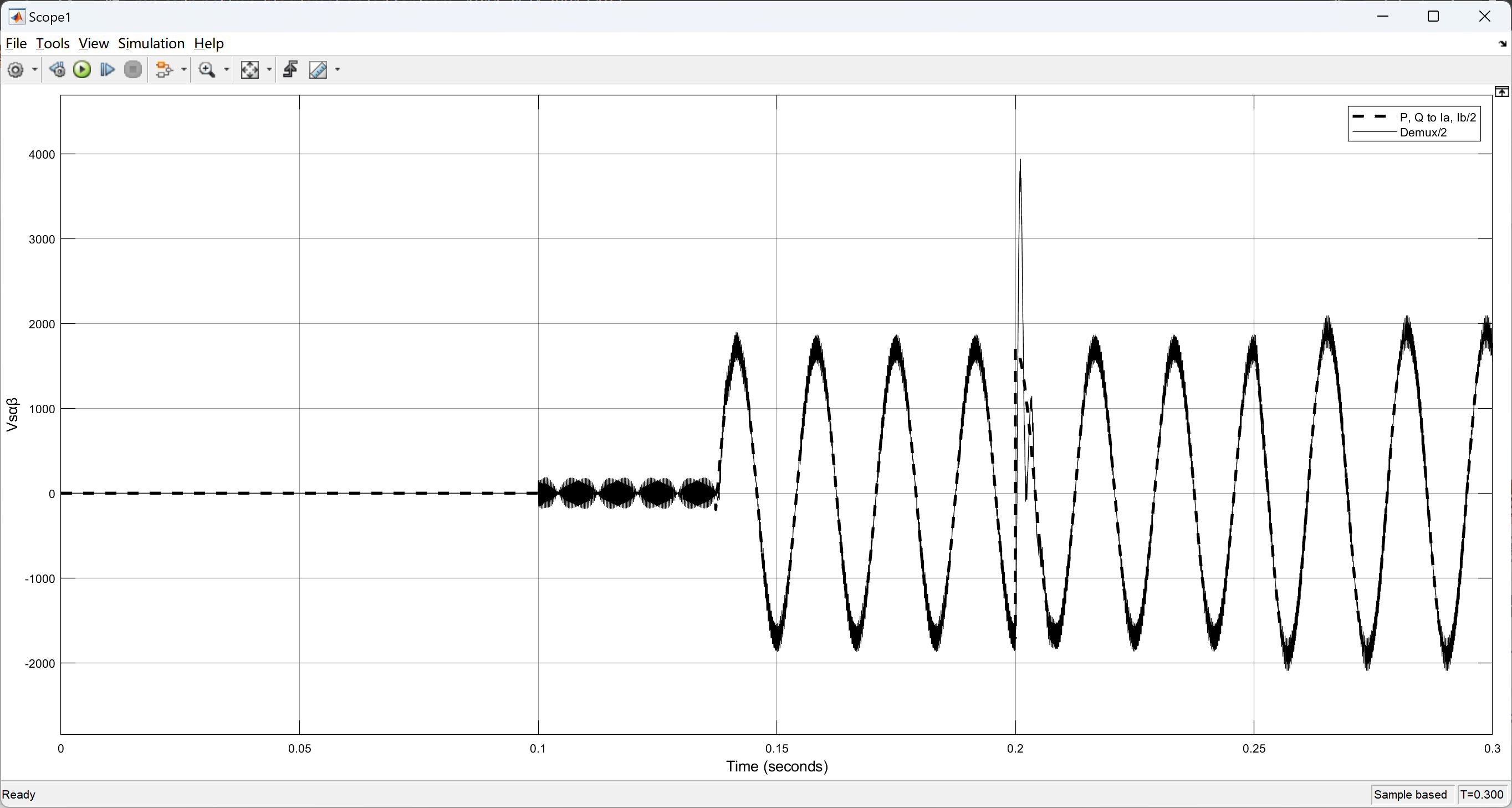
根据对实时/无功功率控制器动态性能的仿真结果,我们可以观察到所有观测参数的行为与教科书[2]中示例7.1中给出的相同。图9展示了仿真结果,其中Ps和Qs迅速跟随它们各自的命令。图9显示,当Ps=1兆瓦,Qs=0时,ia与Vsa同相位;当Ps=-1兆瓦,Qs=0时,ia滞后Vsa180°;当Ps=-1兆瓦,Qs=0.5兆乏时,ia滞后Vsa153°。这与教科书[2]中示例7.1的图8中观察到的情况相同。图12展示了图4的控制系统的一些重要变量。图12显示,iαref(和iβref)在t=0.1372秒之前为零。因此,α轴(和β轴)控制器保持uα(和uβ)等于Vsα(和Vsβ)。这意味着电感器之间没有电压降,因此iα(和iβ)保持为零。图11还显示,iαref(和iβref)在t=0.1372秒时更改为非零值。因此,α轴(和β轴)控制器相应地根据Vsα(和Vsβ)更改uα(和uβ),以在接口电感器上产生所需的电压降,并调节iα(和iβ)至其参考命令,这也与教科书[2]中示例7.1的图11中观察到的情况相同。
结论:
从图9的仿真结果中,我们观察到Ps和Qs迅速跟随它们各自的命令。然而,Ps和Qs的响应并非完全解耦。原因在于完全解耦Ps和Qs的控制需要iα和iβ立即跟随其相应的参考命令。然而,由于α轴和β轴闭环系统的带宽有限,iα和iβ在响应速度方面受到限制,因此Ps和Qs在某种程度上是耦合的。
从图12中,我们可以观察到α轴和β轴控制器的输出uα和uβ紧密跟随Vsα和Vsβ。uα和uβ相当于VSC交流端电压Vtabc基波的αβ坐标分量,因此,为了确保接口电感器上的零电压降,uα和uβ通过根据Ps和Qs的需求改变iα和iβ而紧密跟随Vsα和Vsβ。详细文档和参数、数学模型见第4部分。
As we can observe from the results of the simulation for Dynamic Performance of Real-/Reactive-Power Controller,
all the behaviour of observed parameters are the same as given in the from the textbook [2] in Example 7.1. Figure 9
illustrates the results of the simulation that Ps and Qs rapidly follow their respective commands. Figure 9 shows that ia
is (i) in phase with Vsa when Ps = 1 MW, and Qs = 0, (ii) 180◦ lagging Vsa when Ps = -1 MW, and Qs = 0, and (iii) 153◦
lagging Vsa when Ps = -1 MW, and Qs = 0.5 MVAr), same as also observed in the Figure 8 from the textbook [2]
Example 7.1.
Figure 12 illustrate a number of important variables of the control system of Figure 4. Figure 12 shows that iαref (and
iβref ) is zero until t = 0.1372 s. Therefore, the α-axis (and β-axis) controller keeps uα (and uβ) equal to Vsα (and Vsβ). It
means there is no voltage drop across the inductors and, thus, iα (and iβ) remains zero. Figure 11 also shows that iαref
(and iβref ) is changed to a nonzero value at t = 0.1372 s. Consequently, the α-axis (and β-axis) controller accordingly
changes uα (and uβ) with respect to Vsα (and Vsβ), to generate the required voltage drop across the interface inductors
and regulate iα (and iβ) at its reference command, again, same as also observed in the Figure 11 from the textbook [2]
Example 7.1.
Conclusion:
As we have observed in the simulation from Figure 9, Ps and Qs rapidly follow their respective commands. However,
the responses of Ps and Qs are not perfectly decoupled from each other. The reason is that a perfect decoupled control
of Ps and Qs requires iα and iβ to instantly follow their corresponding reference commands issued. However, due to the
limited bandwidth of α- and β-axis closed-loop systems, iα and iβ are limited in terms of the speed of response and thus
Ps and Qs are somewhat coupled.
From Figure 12, we can observed that the outputs of α- and β-axis controllers, that is, uα and uβ, are closely following
Vsα and Vsβ. uα and uβ are equivalent to the αβ-frame components of the fundamental harmonic of the VSC AC-side
terminal voltage Vtabc, therefore, to ensure zero voltage drop across interface inductors, uα and uβ closely follow Vsα
and Vsβ by changing iα and iβ according to the demand of Ps and Qs.
📚2 运行结果


🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。















 570
570











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









