







1,实现调度器
在task.c中定义调度器启动函数:
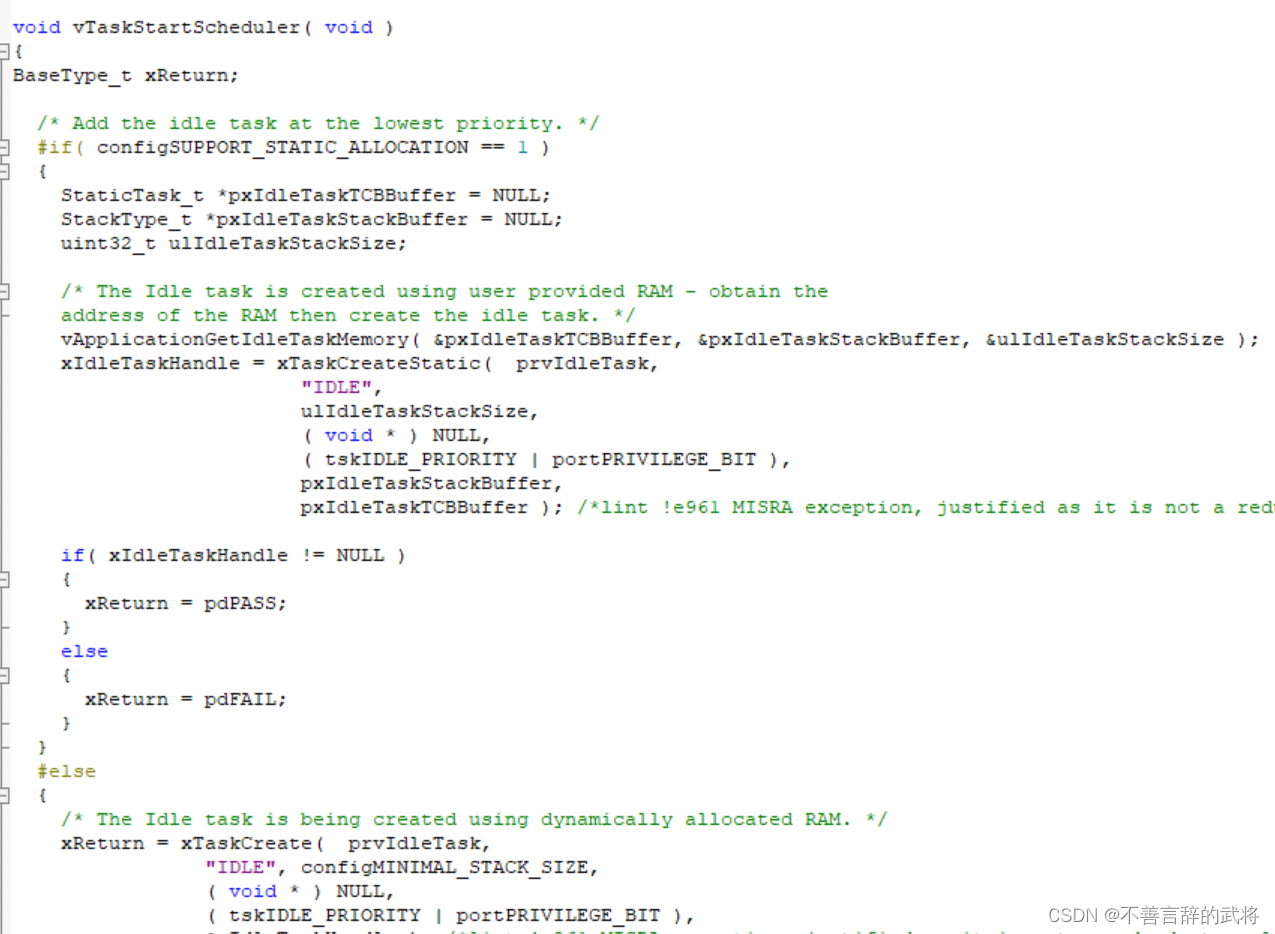
这里面涉及任务优先级之类的,目前还未涉及优先级,可以自己手写一个手动指定任务:

这个Task1TCB是后面定义第一个任务的TCB,现在还没定义。这个任务调度器启动函数使用了xPortStartScheduler函数,具体定义如下;
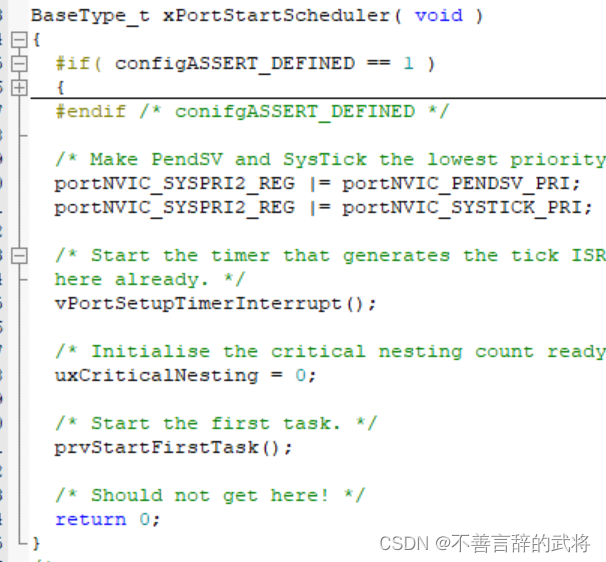
这个函数功能就是把cortex m内核的SCB中SHPR3寄存器设置Pendsv和systick中断优先级为最低,然后就调用prvStartFirstTask启动第一个任务:

该函数首先将当前栈按8字节对齐,然后初始化MSP主栈的地址(从SCB_VTOR寄存器取得,该寄存器存放的是向量表起始地址,即让MSP指向向量表起始地址)然后用CPS指令开启全局中断,CPS指令操作的是内核中PRIMASK和FAULTMASK的中断屏蔽寄存器,此外内核还有一个BASEPRI,有关这三个寄存器的功能具体参考cortex权威指南。接下来调用SVC产生SVC中断,在SVC中断服务函数里面真正的启动我们第一个函数。
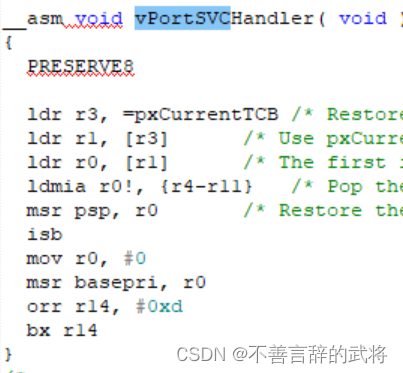
此函数将pxCurrentTCB指向的将要执行的任务栈中信息传入相应寄存器,然后更新psp指针指向r0,在SVC中断服务函数退出前向r14寄存器或上0x0d,让中断返回时后使用PSP栈指针(在中断退出前,内核会检查r14最后四位来判断中断返回后使用那个指针,通常情况下默认使用MSP),然后bx r14跳转,此时会自动根据栈指针(此时使用的是PSP)将r0—xPSR寄存器值更新,最后PSP指向任务栈栈底。此时,任务开始运行了。(当进入中断的时候,r14就不是保存返回的地址,而是保存异常中断模式将要返回的地址,包含了进入中断时使用的MSP还是PSP栈指针)。
2,任务切换

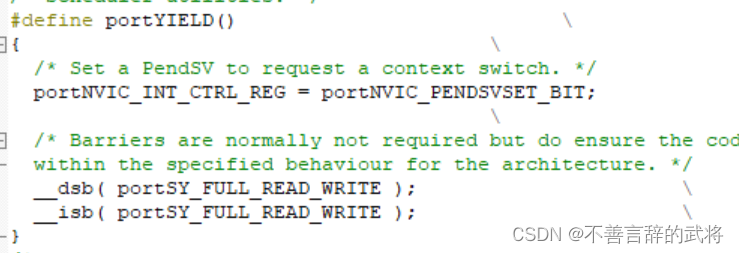
该函数触发Pendsv中断进入中断服务函数

该函数将当前运行的函数信息保存在栈中,然后进入临界段调用 vTaskSwitchContext切换pxCurrentTCB指向下一个将要运行函数,然后退出临界段将将要运行函数栈信息出栈恢复到相应寄存器,随后就会执行任务2(注:在进入vTaskSwitchContext时将当前r14和r3寄存器压入中断函数栈中,因为调用vTaskSwitchContext时会更新r14寄存器,而r3不确定会不会作为中间变量)

该函数是自己写的手动指向任务。
总结,任务启动在SVC中断启动,任务切换在pendsv中断启动,任务切换要注意MSP和PSP指针的切换使用。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









