






一、STM32定时器的分类
1.1 按照内核、外核、特定、常规分为4大类:
1)内核定时器:Systick
2)外设定时器:特定应用定时器+常规定时器8 N) M" B( m% N5 e$ S; N% }
3)特定应用定时器:LPTIM,RTC,WTD,HRTIM
4) 常规定时器:基本定时器TIM6&TIM7)、通用定时器(TIM2~TIM5,TIM9~TIM14)、高级定时器(TIM1&TIM8)
1.2 CPU时序
此处我们提一下学习单片机原理的课程时,提到的几个CPU时序。
振荡周期:为单片机提供定时信号的振荡源的周期。
状态周期:1个状态周期=2个振荡周期
机器周期:1个机器周期=6个状态周期=12个振荡周期
指令周期:完成1条指令所占用的全部时间,以机器周期为单位。
以12MHz外接晶振为例
振荡周期=1/12us,相当于1/12*10^6,所以单位为us;
状态周期=1/6us
机器周期=1us
指令周期=1~4us
STM32共有14组常规定时器,其实也可以称为计数器,定时器/计数器的工作过程是自动完成的,不需要CPU的参与,互相独立,执行不同的任务,可以增加单片机的效率。
二、定时器中断原理
2.1 何为定时器中断:定时器中断是由单片机中的定时器溢出而申请的中断。
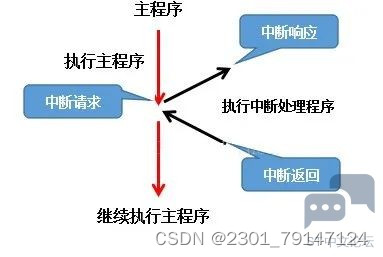
提到中断,必须满足几个要素:中断源,中断请求,中断优先级。 使CPU发生中断的事件称为中断源,中断源向CPU发出中断请求,CPU暂时中断原来执行的事件A转去执行事件B,事件B处理完成后继续返回原先中断的位置(该过程称为中断返回,原先中断的地方称为断点),继续执行原先的事件。
* a5 d5 G/ v* v2 e) {! |% }5 K( I
2.2 中断流程可以用下图表示:
二、定时器中断原理
2.1 何为定时器中断:定时器中断是由单片机中的定时器溢出而申请的中断。
提到中断,必须满足几个要素:中断源,中断请求,中断优先级。 使CPU发生中断的事件称为中断源,中断源向CPU发出中断请求,CPU暂时中断原来执行的事件A转去执行事件B,事件B处理完成后继续返回原先中断的位置(该过程称为中断返回,原先中断的地方称为断点),继续执行原先的事件。
* a5 d5 G/ v* v2 e) {! |% }5 K( I
2.2 中断流程可以用下图表示:
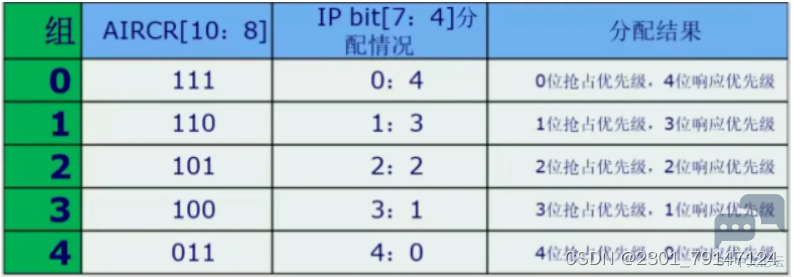
#define NVIC_PriorityGroup_0 ((uint32_t)0x700)
/*!< 0 bits for pre-emption priority 4 bits for subpriority */( y4 [* G. x& W0 l
#define NVIC_PriorityGroup_1 ((uint32_t)0x600)
#define NVIC_PriorityGroup_1 ((uint32_t)0x600)
/*!< 1 bits for pre-emption priority 3 bits for subpriority */: S' h, L0 w/ {1 N1 c' w
#define NVIC_PriorityGroup_2 ((uint32_t)0x500)
#define NVIC_PriorityGroup_2 ((uint32_t)0x500)
/*!< 2 bits for pre-emption priority 2 bits for subpriority */
#define NVIC_PriorityGroup_3 ((uint32_t)0x400)
#define NVIC_PriorityGroup_3 ((uint32_t)0x400)
/*!< 3 bits for pre-emption priority1 bits for subpriority */
#define NVIC_PriorityGroup_4 ((uint32_t)0x300)
#define NVIC_PriorityGroup_4 ((uint32_t)0x300)
/*!< 4 bits for pre-emption priority 0 bits for subpriority */
在函数中要调用
void MY_NVIC_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group)
实现对某一个中断的中断分组和优先级配置。
与定时器配置紧密相关的就是自动重装载计数器(CNT)和预分频器(PSC),初始化定时器就是对定时器的CNT、PSC进行设置。下面介绍一下与本文密切相关的几个通用定时器的寄存器
三、定时器相关寄存器及中断编程
3.1定时器相关寄存器
3.1.1 控制寄存器TIMx_CR1

位0 CEN:计数器使能,0:禁止计数器,1,使能计数器
注意:只有事先通过软件将CEN位置去,才可以使用外部时钟、门控模式、编码器模式,而触发模式可以通过硬件自动将CEN置1;在单脉冲模式下,当发生更新事件时会自动将CEN位清零。
本实验中,我们只用到了TIMx_CR1的最低位,也就是计数器使能位,该位必须置1,才能让定时器开始计数。
3.1.2 DMA中断使能寄存器 TIMx_DIER

位0 UIE:更新中断使能,0:禁止更新中断,1:使能更新中断
TIMx_DIER是一个16bit的寄存器,对于要实现的中断试验,我们仅关心第0bit,因为定时器中断实验要用到定时器的更新中断,所以将该位置为1,表示允许更新时间所产生的中断。
L) ?+ C d1 N6 e+ R/ r9 n2 s
3.1.3预分频寄存器TIMx_PSC

位0:15 PSC:预分频器值。(范围是0~65535)
表示计数器时钟频率CK_INT 等于Fck_psc/(PSC[15:0]+1).PSC包含在每次发生更新事件时要装载到实际预分频器寄存器的值。(84MHz的CK_INT,那计数器的时钟频率为84/(PSC[15:0]+1)MHz,计数器时钟的取值范围为(0.00128~84)MHz,那么计数器时钟周期为0.012us(84MHz)~781us(0.001MHz);
这个地方要注意:预分频值=实际分频值-1,如果要设定实际分频值为8400(定时器的工作频率为10kHz),那我们设定预分频值为8399















 1320
1320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









