







红外可见光融合的小目标检测 现在已经成为研究的主流,不仅克服光感不好的情况,充分利用红外的轮廓信息,以及充分利用可见光的纹理信息,实现全天候的检测已经成为趋势,模型轻量化,易部署。
1.数据预处理
数据集是天津大学拍摄制作。
首先需要数据处理,因为原本的数据集自带的有100*100的白边,对检测影响很大,特别是YOLO系列的检测模型

处理前后对比
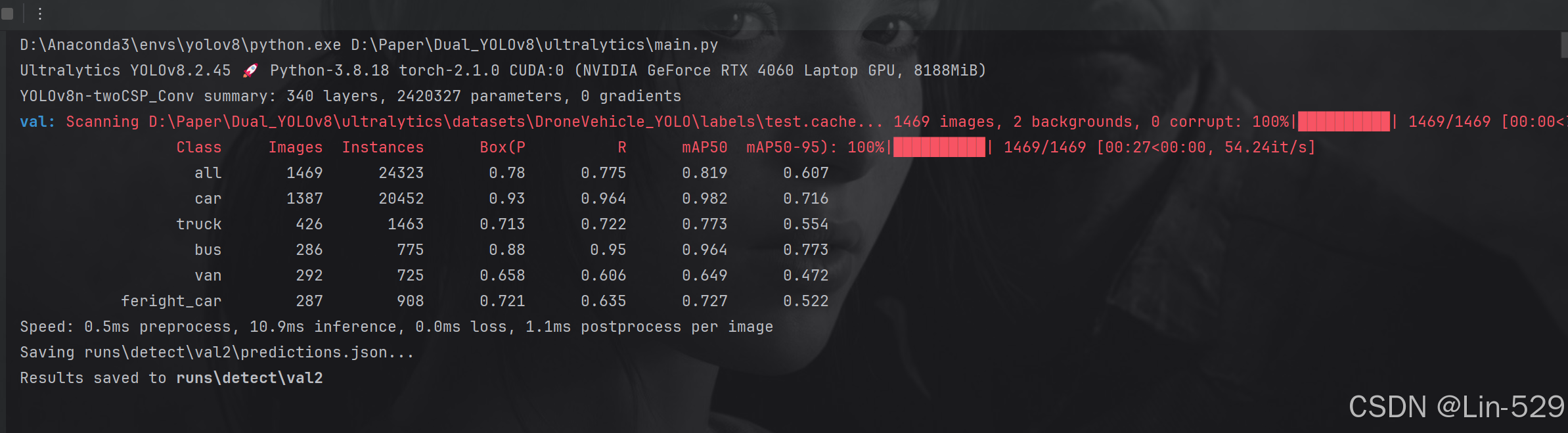
2.YOLOv8训练
检测效果还不错

特别注意的是在数据集转换的时候,也就是转成YOLO的时候,可能会出现负坐标,或者是超过1的坐标值,这样就会导致模型训练不了,所以,需要进行针对那些数据集进行特殊的处理。
改进后参数少,模型轻量化,直接暴涨点:
数据集处理的方法&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1589
1589

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









