







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的电梯内电动车闯入监测系统
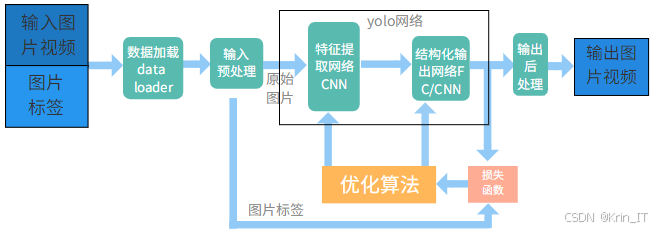
设计思路
一、课题背景与意义
随着城市化进程的加快,电动车的使用日益普及,尤其是在办公楼宇及住宅小区中。然而,电动车在电梯内的进入带来了潜在的安全隐患。一方面,电动车可能因电瓶自燃、爆炸等原因对乘客造成严重伤害,尤其是在密闭电梯空间内,这种风险更为显著;电动车充电可能损害企业利益,造成电费资源的浪费。禁止电动车进入电梯成为了一项必要的管理措施。传统的电梯安全管理手段往往依赖人工监控,效率低且易出现疏漏。基于深度学习的目标检测技术可以有效提高电梯内电动车监测的智能化水平,迅速识别并报警,从而保障乘客的安全和企业的利益。
二、算法理论原理
2.1 卷积神经网络
电梯内电动车闯入监测系统中,卷积神经网络(CNN)的应用为目标检测提供了强大的技术支持。相较于多层感知机(MLP),CNN在处理图像数据时表现出更高的效率和准确性。多层感知机是最早的深度学习模型,由输入层、隐含层和输出层组成,隐含层的输出通过权重和偏置进行计算。尽管理论上可以叠加多个隐含层,MLP在实际应用中常常仅包含一层隐含层,限制了其深度和复杂性。
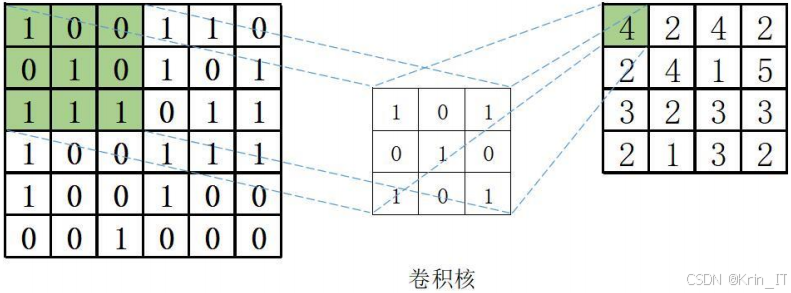
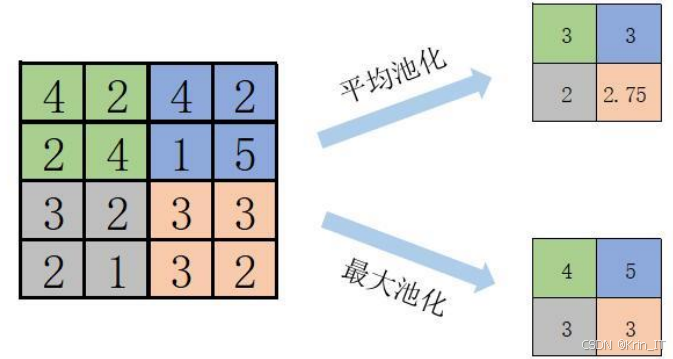
卷积神经网络受到人类视觉系统的启发,设计上同样由输入层、隐含层和输出层构成,但隐含层包含卷积层、池化层和全连接层。卷积层通过卷积核提取图像中的特征,卷积核中包含权重信息,如使用3x3的卷积核对特征图进行处理。池化层则在卷积层之后,执行图像的稀疏处理,保留重要特征,减小计算量。常见的池化操作有平均池化和最大池化,前者获取背景信息,后者则更关注边缘特征。
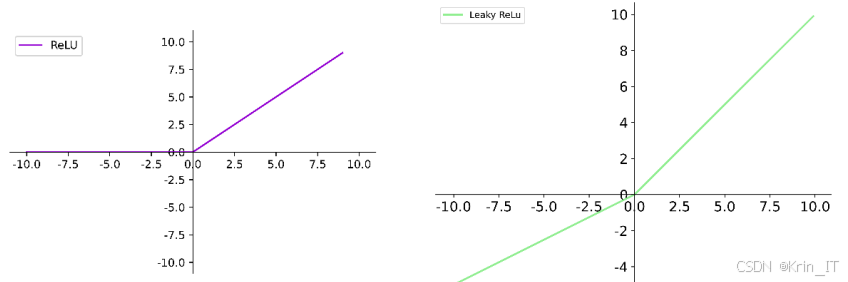
在卷积和池化操作之后,全连接层负责对提取到的特征进行加权求和,得出最终的预测值。该层与输出层相连,但不具备特征提取能力。激活函数的引入使得模型能够处理非线性问题,增强模型对复杂函数的拟合能力,提高分类效果。通过这种结构,卷积神经网络能够有效地从图像中提取相关特征,进而实现对电梯内电动车的准确监测与识别。
2.2 目标检测算法
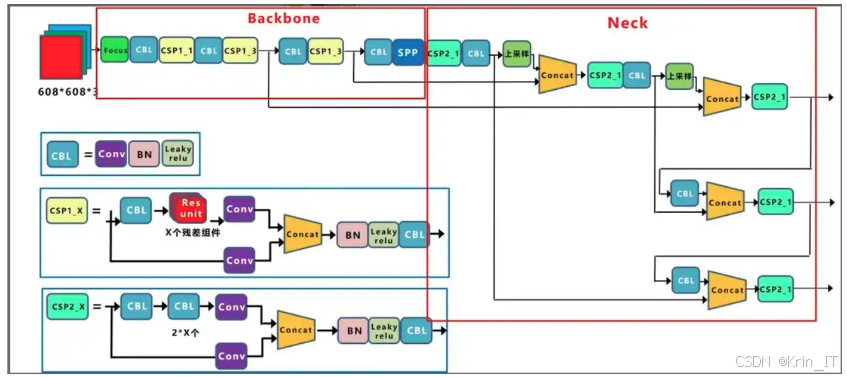
YOLOv5是继YOLO系列目标检测算法后的最新版本,继承了YOLO系列的高效性和实时检测能力。该算法通过将目标检测任务视为一个回归问题,直接在图像上预测边界框和类别概率。YOLOv5在网络架构上进行了优化,采用了更轻量级的模型设计,如CSPNet和Focus模块,显著提高了检测速度和准确性。此外,YOLOv5还引入了数据增强、模型蒸馏和自适应锚框等技术,使得在不同规模的目标检测中表现更加优异。相较于之前的YOLO版本,YOLOv5在精度和速度上达到了更好的平衡,因而广泛应用于各种计算机视觉任务。
在电梯内电动车闯入监测系统中,YOLOv5的实时检测能力和高效性使其成为理想的选择。系统通过安装在电梯内的摄像头实时捕捉电梯内的图像数据,YOLOv5模型对这些图像进行处理,迅速识别出电动车的存在。其高帧率的检测能力确保了在电梯运行过程中,系统能够在毫秒级别内做出反应,及时发出警报,阻止电动车进入电梯。通过训练YOLOv5模型以识别电动车,系统能够有效地保障乘客的安全,并维护电梯的正常运行。
采用YOLOv5算法的电梯内电动车监测系统不仅提高了安全性,也降低了人工监控的需求。随着深度学习技术的不断发展,YOLOv5将进一步优化其模型结构,以提升检测精度和速度。未来,结合边缘计算和物联网技术,该系统有望实现更高层次的智能化,能够实时分析电梯内的环境,自动做出决策,进一步提升电梯管理的智能化水平。
2.3 注意力机制
注意力机制的核心思想是模仿人类视觉系统的聚焦能力,能够有效地强调输入特征中的重要部分。典型的注意力机制通常由两个主要组成部分:通道注意力和空间注意力。通道注意力通过对每个通道的特征进行加权,能够自动识别哪些特征通道对最终任务更为重要,从而增强重要特征的表示能力。空间注意力则通过关注特征图中的特定空间位置,强调目标区域,从而提高模型对关键区域的识别能力。结合这两种注意力机制,可以实现对特征信息的全面强化,使得网络在处理复杂场景时更加专注于有用信息。
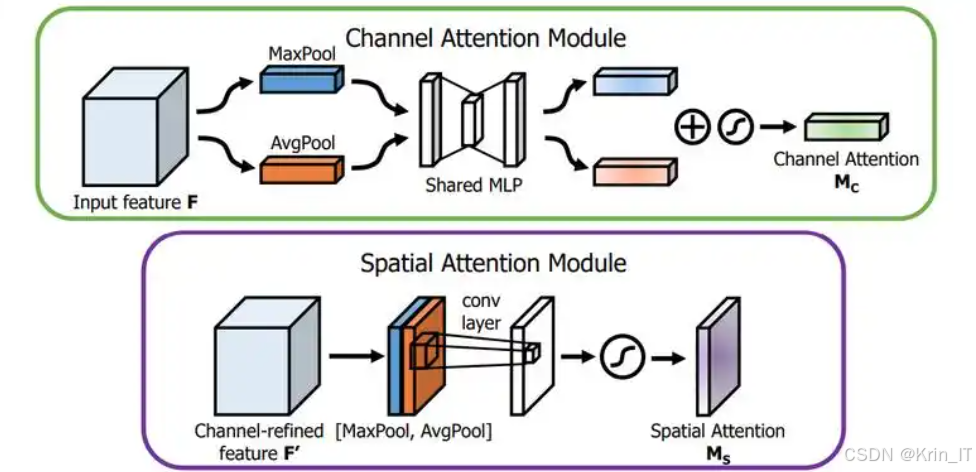
在YOLOv5算法中引入注意力机制,如CBAM,显著提升了模型的检测性能。通过添加通道和空间注意力模块,YOLOv5能够在特征提取阶段对重要特征进行加权,这使得模型在面对复杂背景和小目标时,能够更准确地进行目标识别和定位。
三、检测的实现
3.1 数据集
为了确保数据的多样性和代表性,采用了两种方式进行图像采集:自主拍摄和互联网采集。自主拍摄过程中,研究团队在不同类型的电梯内拍摄了大量电动车的图像,包括不同的角度、光照条件和环境背景。这种方法能够获取到与实际应用场景高度相关的图像数据。同时,还通过互联网收集公开的电动车及电梯相关图像,以补充数据集中的样本多样性,确保数据集的全面性和丰富性。
使用了专业的数据标注工具,如LabelImg或Labelme,对采集到的图像进行标注。数据标注的目标是为每张图像中的电动车对象绘制边界框,并将其标记为“电动车”类别。为了提高标注的准确性和一致性,我们制定了详细的标注规范,并对标注人员进行了培训。经过多轮审核和校正,确保每一张图像的标注结果都准确无误,为后续的模型训练提供高质量的数据基础。
对数据集进行了划分,以便于训练、验证和测试。通常,我们将数据集按比例划分为训练集(70%)、验证集(15%)和测试集(15%)。此外,为了增强模型的泛化能力,我们还进行了数据扩展,如随机裁剪、旋转、缩放和颜色变化等。这些数据扩展技术帮助模型在不同情况下更好地识别电动车,提升了检测的准确性和鲁棒性。
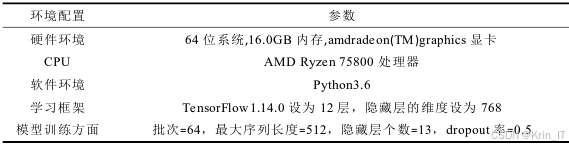
3.2 实验环境搭建
深度学习框架为构建、训练、优化和推理深度神经网络提供了必要的基础工具,使开发者能够更高效地进行相关工作。这些框架不仅简化了复杂的计算过程,还提供了丰富的功能和灵活的接口,帮助开发者快速实现各种深度学习算法。在众多深度学习框架中,PyTorch因其高度的扩展性和可移植性而受到广泛欢迎,尤其在学术研究和工业应用中表现出色。它的动态计算图特性使得模型的调试和修改变得更加直观和方便,同时,PyTorch拥有一个活跃的开发者社区,提供了大量的资源和支持,极大地推动了深度学习的研究和应用。
3.3 实验及结果分析
选择了卷积神经网络(CNN)和YOLOv5算法作为基础框架。YOLOv5的主干网络采用了轻量化设计,结合了PANet(路径聚合网络)结构,以优化特征提取过程。这种架构能够有效降低模型的大小,同时确保模型在处理速度和准确性之间取得良好的平衡。通过对网络结构的精简,我们能够在保持较高检测性能的同时,提升模型在边缘设备上的运行效率。
# 示例:加载YOLOv5模型
import torch
# 加载YOLOv5的轻量化模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)损失函数的设计对于模型的训练效果至关重要。在YOLOv5中,对原有的损失函数进行了改进,特别是针对样本不平衡的问题。通过引入Focal Loss等技术,可以更好地处理类别不均衡的样本,从而加快模型的收敛速度。改进后的损失函数能够更有效地关注难以分类的样本,使得模型在学习过程中更加注重重要的特征,提高了最终的检测精度。
# 示例:自定义损失函数
import torch.nn as nn
class FocalLoss(nn.Module):
def __init__(self, alpha=1, gamma=2):
super(FocalLoss, self).__init__()
self.alpha = alpha
self.gamma = gamma
def forward(self, inputs, targets):
BCE_loss = nn.BCEWithLogitsLoss()(inputs, targets)
loss = self.alpha * (1 - torch.exp(-BCE_loss)) ** self.gamma * BCE_loss
return loss为了进一步提升模型的检测和识别能力,在YOLOv5中引入了CBAM注意力机制。CBAM通过在通道和空间两个维度上对特征进行加权,显著增强了有效特征信息的提取。这一机制帮助模型更好地聚焦于重要区域,从而提高检测的准确性和鲁棒性。添加CBAM后,模型在多个评估指标上均有所提升,特别是在mAP和各类别的AP值上表现显著。
# 示例:CBAM模块的实现
import torch
import torch.nn as nn
class CBAM(nn.Module):
def __init__(self, in_channels, reduction=16):
super(CBAM, self).__init__()
self.channel_attention = ChannelAttention(in_channels, reduction)
self.spatial_attention = SpatialAttention()
def forward(self, x):
x = self.channel_attention(x) * x
x = self.spatial_attention(x) * x
return x模型训练完成后,通过对比不同模型的FPS(每秒帧数)、模型大小、mAP和各类别的AP值等指标,来评估模型的性能表现。这些评估指标能够帮助我们直观地了解不同版本模型在实际应用中的效果,以及在速度和准确性之间的权衡。通过不断的实验和调优,最终选择了最适合电梯内电动车监测的模型,为后续的系统部署和应用奠定基础。
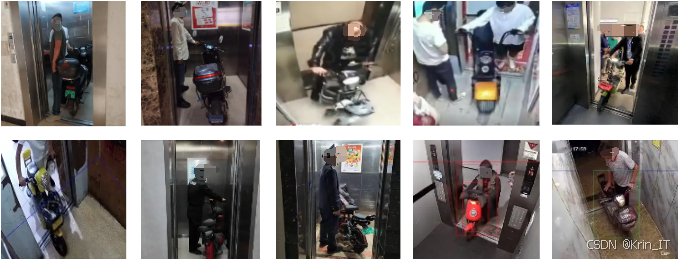
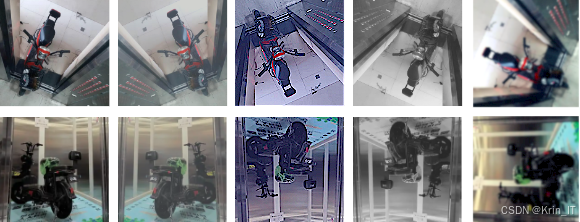
实现效果图样例:


创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









