









目录
2.2 可行解集(Feasible Solution Set)
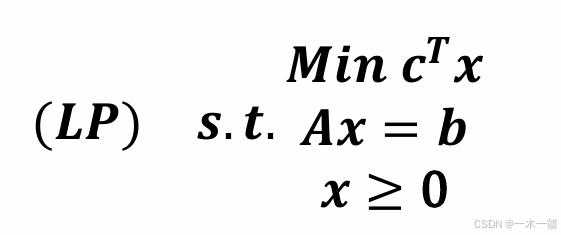
1.线性规划的基础模型和模型术语
1.1 基础模型
1.2 模型术语
1.2.1 可行域 (Feasible Region)

定义:线性规划中所有满足约束条件的决策变量取值构成的集合
特性:
-
顶点重要性:最优解必在顶点处
-
几何特征:由约束条件围成的凸多边形(二维)或多面体(高维)
-
空集判定:当约束条件矛盾时无解
1.2.2 有界可行域(Bounded feasible domain)
定义:所有可行解的取值均被限制在有限范围内,不存在无限延伸方向。
特征:
-
封闭性:可行域为凸多面体且所有顶点坐标有限(如二维时为凸多边形)
-
顶点确定性:顶点数量有限,且每个顶点对应至少nn个紧约束(约束取等号)
-
最优解必存在:若目标函数连续且可行域有界,则至少存在一个最优解(极值定理)
-
多重最优可能:目标函数可能与某条边平行,导致该边上所有点均为最优解
1.2.3 可行解(Feasible solution)
定义:满足所有约束条件的决策变量取值组合
特性:
-
几何意义:位于可行域(凸多面体)内部或边界上的任意点
-
存在性验证:必须通过全部线性不等式/等式检验
1.2.4 基本可行解 (Basic Feasible Solution)

定义:既是基本解又满足非负性条件的解
特性:
-
最优解候选:单纯形法通过遍历BFS寻找最优解
-
顶点对应:每个BFS对应可行域的一个顶点(二维时为多边形顶点)
1.2.5 最优解 (Optimal Solution)

定义:使目标函数达到极值(例如最大利润或最小成本)的可行解
特性:
-
唯一性:可能唯一,也可能存在无限多解
-
灵敏度边界:当目标系数在允许范围内波动时,最优基不变
-
多重最优场景:若目标函数平行于某条边,则该边上所有点均为最优解
2.基本知识
2.1 超平面
定义:在n维空间中,超平面是一个(n-1)维的线性子空间,其几何意义是将空间划分为两个半空间的边界
数学表达为线性方程:

关键特性:
- 几何意义:在二维空间中为直线,三维空间中为平面,高维空间中推广为超平面
- 分类边界:在机器学习(如SVM)中,超平面是区分不同类别的最优决策边界
- 距离计算:点X0到超平面的距离为:
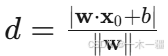
- 法向量指向上半空间
2.2 可行解集(Feasible Solution Set)
定义:在优化问题中,满足所有约束条件的解的集合,称为可行解集。其数学形式为:

核心性质:
- 凸性:若所有约束为凸函数,则可行解集为凸集
- 边界与顶点:在凸多面体可行域中,最优解常出现在顶点
- 空集与无界:约束矛盾时可行集为空;若目标函数在可行域上无界,则问题无解
3.图解法和单纯性法
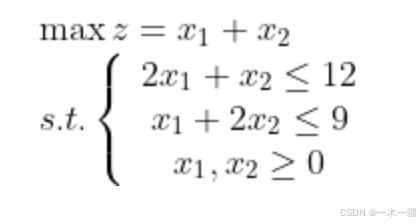
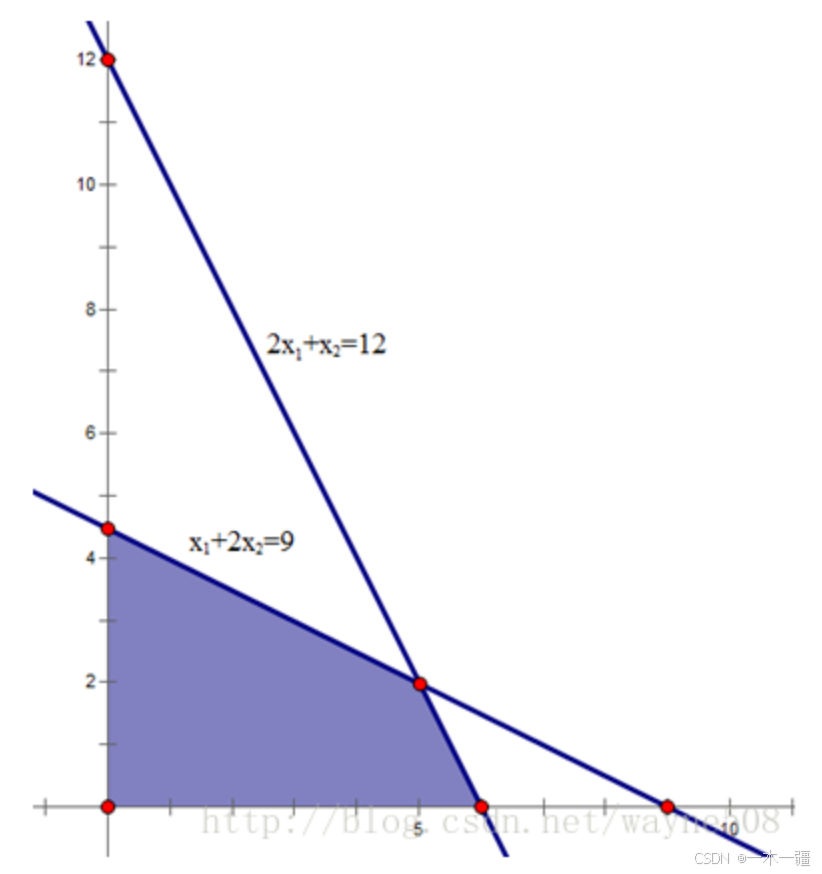
3.1 图解法
定义:图解法是一种通过几何图形求解两个变量线性规划问题的直观方法,通过在坐标系中绘制约束条件、目标函数和可行域,直接观察最优解的位置
案例:
优缺点:
- 优点:直观易理解,适合教学和小规模问题
- 缺点:仅适用于两个变量,无法处理高维问题
3.2 单纯性法
定义:单纯形法是求解多变量线性规划问题的迭代算法,通过遍历可行域的顶点(基本可行解),逐步优化目标函数值直至达到最优解
详细案例和讲解见:运筹学之线性规划(单纯性法)-CSDN博客
4.仿射集、凸集和圆锥体
4.1 仿射集
定义:集合 A⊆Rn称为仿射集,若对任意两点 x1,x2∈A 及任意标量 θ∈R,其仿射组合 θ*X1+(1−θ)*X2 仍属于 A
数学表达:∀X1,X2∈A, θ∈R ⟹ θ*X1+(1−θ)*X2∈A
几何意义:
- 仿射集是“平直”的几何对象,如直线、平面或超平面
- 不要求包含原点:与向量空间(子空间)不同,仿射集可通过平移子空间得到
示例:
- 二维空间中,直线 y=2x+1是仿射集(不经过原点)
- 三维空间中,平面 x+y+z=5是仿射集
4.2 凸集
定义:集合 C⊆Rn称为凸集,若对任意两点 x1,x2∈C及标量 θ∈[0,1],其凸组合 θ*X1+(1−θ)*X2仍属于 C。
数学表达:∀X1,X2∈C, θ∈[0,1] ⟹ θ*X1+(1−θ)*X2∈C
几何意义:
- 凸集中任意两点的线段完全位于集合内部(如圆形、矩形、多面体)
- 非凸示例:月牙形、星形区域(存在“凹陷”或“孔洞”)
示例:
- 单位球 {x∣∥x∥≤1}是凸集
- 多面体 {x∣Ax≤b}是凸集(线性不等式约束的交集)
4.3 圆锥体
定义:集合 K⊆Rn 称为凸圆锥,若满足:
- 数乘封闭性:∀X∈K, λ≥0 ⟹ λX∈K
- 加法封闭性:∀X1,X2∈K ⟹ X1+X2∈K
数学表达:∀X1,X2∈K, λ1,λ2≥0 ⟹ λ1*X1+λ2*X2∈K
几何意义:
- 凸圆锥是从原点出发的射线集合,且任意两射线的“夹角区域”也属于圆锥(如第一象限、冰激凌筒形状)
- 非凸圆锥:如两条不共线的射线(不满足加法封闭性)
示例:
- 非负象限 R+n={x∣xi≥0}是凸圆锥
- 二阶锥 {(x,t)∣∥x∥≤t} 是凸圆锥
5.线性规划基本定理
5.1 分辨率定理
定义:
分辨率定理(又称分解定理)指出,任何非空多面体(线性规划的可行域)可表示为顶点(极点)、极方向(极射线)和线性子空间的组合。具体形式为:

几何结构分解:
- 顶点对应可行域的边界点(如线性规划的基可行解)
- 极方向描述可行域无限延伸的方向(如无界问题的可行增长方向)
- 子空间表示可行域可能的平移自由度(如等式约束下的平行移动)
示例:
考虑可行域 P={x∈R2∣x1+x2≥1, x1≥0}:
- 顶点:(1,0)和 (0,1)
- 极方向:沿 x1 轴正方向(d=(1,0)
- 表示:P=conv((1,0),(0,1))+cone((1,0))
5.2 线性规划基本定理
定义:
线性规划基本定理包含以下核心命题:
- 可行解存在性:若线性规划问题有可行解,则至少存在一个基可行解(顶点)
- 最优解存在性:若问题有最优解,则至少存在一个顶点是最优解
- 强对偶性:原始问题与对偶问题同时有解时,目标函数值相等
数学表达:
- 基可行解存在性:
rank(A)=m ⟹ ∃xB=B−1b≥0, xN=0 - 顶点最优性:
x∗=argmax c⊤x ⟹ x∗∈vertices(P)
两者的本质和联系:
-
分辨率定理揭示线性规划可行域的几何本质,将复杂多面体拆解为顶点、方向与子空间的组合
-
线性规划基本定理确立顶点解的核心地位,为算法设计(如单纯形法)与对偶分析提供理论基石
-
两定理共同构成线性规划的数学骨架,支撑从理论分析到工业应用的完整链条
有错误和其它想法帮忙指正,定即时回复,感谢支持!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









