







 文章讲述了如何使用YOLOv8在CSDN找到的教程中,通过摄像头获取并存储物体中心坐标,以便进行后续的追踪功能实现。
文章讲述了如何使用YOLOv8在CSDN找到的教程中,通过摄像头获取并存储物体中心坐标,以便进行后续的追踪功能实现。
因为我通过摄像头仅仅框出物体位置,但是我并没有得到更多的信息,而物体中心坐标是一个很重要的信息,有了它我们可以实现物体追踪,视觉追踪等功能,所以第一步,我们就要想办法如何得到物体的中心点的信息。
通过浏览CSDN,网上很多都是直接改源码,只做到打印输出坐标,单丝没办法存到一个变量里面,所以我只能去官网获取一些信息了。
官网 Predict - Ultralytics YOLOv8 Docs 上说:

意思是:我们可以调用boxes.xxx函数来得到目标的边界框。
继续看:
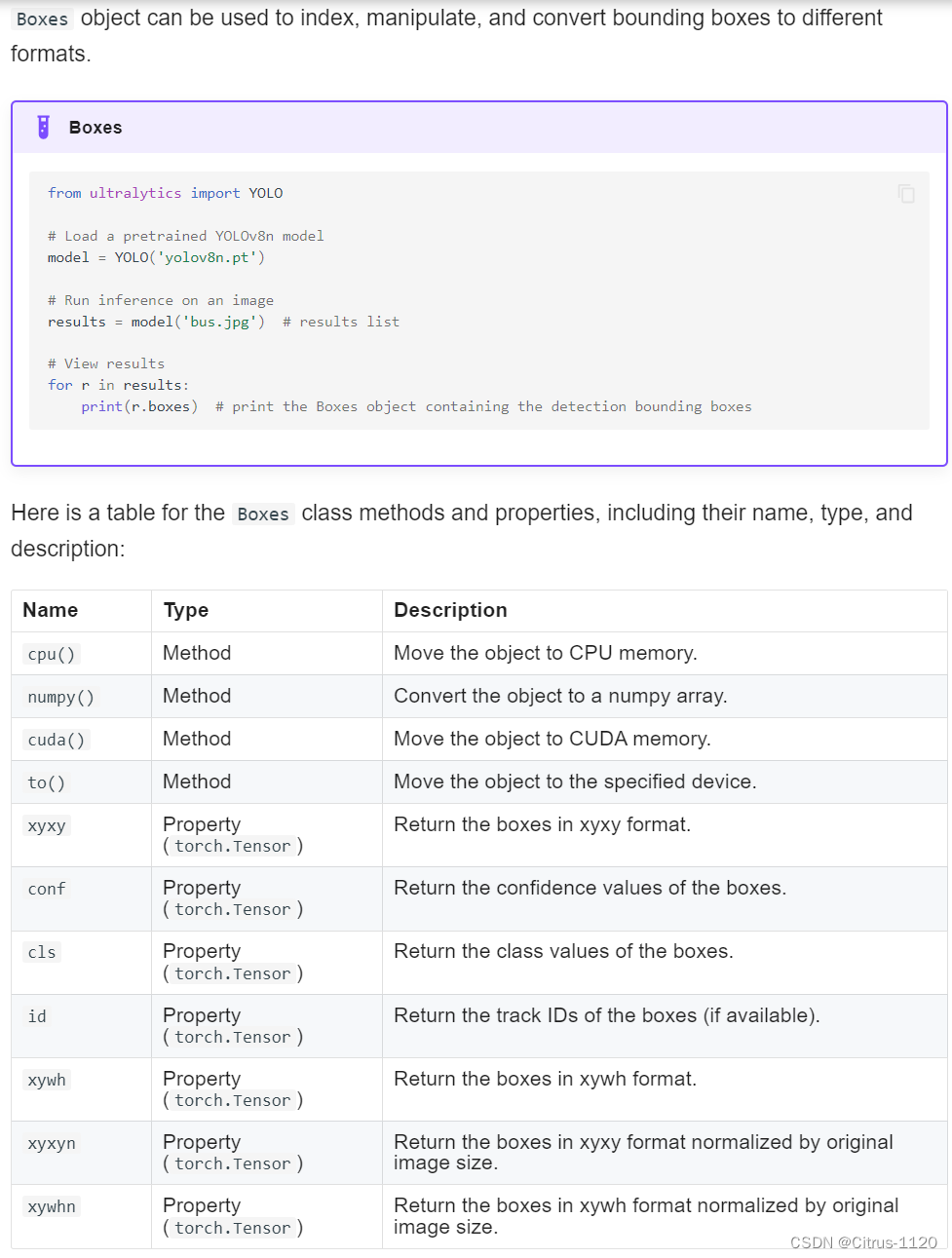
我们可以调用这些函数来得到我们的边界框坐标信息,所以我就开始尝试。这里给出我的输出检测物体坐标的代码:
from ultralytics import YOLO
import cv2
model = YOLO(r"D:\yolov8\runs\detect\train\weights\bes 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2416
2416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









