






零、虚拟机出现的问题(每个人可能不一样)
1、在新开虚拟机的时候,出现虚拟机页面很小的问题,我按照这个博客的第一步操作解决了VM小技巧——虚拟机解决vm窗口太小的办法 - seayuns - 博客园
2、发现虚拟机与电脑之间无法复制粘贴,按照这个来安装vmtool,我看有人在这一步就可以了,但是我重启了之后仍然不行。【VMware】虚拟机与windows之间无法复制粘贴的解决方法_虚拟机上的qt无法复制粘贴到windows-CSDN博客
之后按照这个博主的博客的解决方法二成功解决关于VMware虚拟机与主机之间不能复制粘贴问题解决方案_安装完vmware-tools主机文件无法复制到虚拟机_虚拟机无法复制粘贴到主机-CSDN博客
3、虚拟机没网
彻底解决VM ubuntu在虚拟机找不到网卡无法上网的问题 - 知乎
方法一重启network-manager 服务可以解决我的问题
4、出现死锁的问题
一、安装vmware、ubuntu20.4、 ROS2 Galactic
https://blog.csdn.net/2301_79704871/article/details/136468783?spm=1001.2014.3001.5502
二、按照小米官方文档进行依赖安装
仿真平台模块 (miroboticslab.github.io) 此为小米官方文档
1. 在cmake -DLCM_ENABLE_JAVA=ON ..
①是遇到没有java的问题(没有截图报错)
用Java基础:Ubuntu20.04下JDK1.8安装+配置_ubuntu20.04安装jdk1.8-CSDN博客 这个解决。
注意java版本
①.(1)在配置Java环境变量时,需要改变版本同时部分设备可能会由于配置环境在vim编辑器中的相关语句而导致系统崩溃 同ubuntu 配置java环境变量 修改/etc/environment 导致,登录界面进不去了_ubuntu 安装java环境变量无法进入桌面-CSDN博客PATH代码这一行在编辑的时候输入导致虚拟机开机登录后黑屏,而在解决无果后重装了虚拟机系统,并且在配置Java环境变量时删除了PATH此行代码,后续cmake正常进行无异常
①.(2)在vim编辑器里输入了非法的字符“rt”命令,导致终端不断循环的报错并且无法输入指令
在终端CTRL+c停止循环输出报错后,出现了正常的命令行,重新编辑vim.bashrc删除错误的非法字符报错不再出现
②CMake Error: The source directory "/home" does not appear to contain CMakeLists.txt.
Specify --help for usage, or press the help button on the CMake GUI.
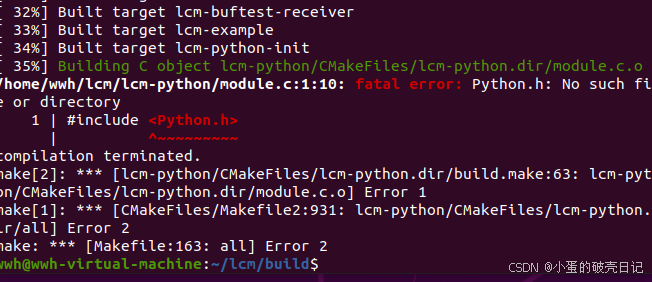
另一种报错也是在没有安装cmake的情况下出现的,make指令进行到35%停滞如下图也可以使用以下方法解决
ubuntu安装cmake的三种方法(超方便!)-CSDN博客我用了第三种方法解决
2. git clone https://github.com/eigenteam/eigen-git-mirror需要下载加速器
我们下载了WattToolkit
打开终端输入 curl -sSL https://steampp.net/Install/Linux.sh | bash
下载后运行报错
fatal: 无法访问 'https://github.com/eigenteam/eigen-git-mirror/':server certificate verification failed. CAfile: none CRLfile: none
在终端输入git config --global http.sslverify false
再运行时成功
3. vcs import < cyberdog_sim.repos
直接运行这一步会报错
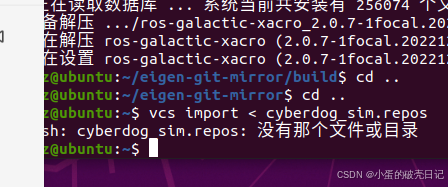
需要根据这个文档做CV_engineer/cyberdog_sim (gitee.com)

















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









