







 本文介绍了基于单片机的GPS全球定位系统仿真设计,包括系统组成、工作原理、软件编程(如AltiumDesigner原理图设计和KEILC语言编程)、硬件选择和接口设计,以及仿真与调试过程。通过综合考虑软硬件设计,实现GPS信号的精确接收和处理。
本文介绍了基于单片机的GPS全球定位系统仿真设计,包括系统组成、工作原理、软件编程(如AltiumDesigner原理图设计和KEILC语言编程)、硬件选择和接口设计,以及仿真与调试过程。通过综合考虑软硬件设计,实现GPS信号的精确接收和处理。
**单片机设计介绍,基于单片机的GPS全球定位系统仿真设计
一 概要
基于单片机的GPS全球定位系统仿真设计概要主要涉及利用单片机作为核心控制器,结合GPS模块,实现GPS信号的接收、处理和显示。以下是该设计的主要内容和要点:
一、系统组成
整个系统主要由单片机、GPS模块、显示屏以及相关的接口电路组成。单片机作为控制中心,负责接收GPS模块的数据,并对其进行处理;GPS模块负责接收卫星信号,并提取出位置、时间等关键信息;显示屏则用于显示处理后的数据。
二、工作原理
GPS模块通过接收来自卫星的信号,获取当前的位置和时间信息。这些信息以特定的格式进行编码,并通过串行通信接口发送到单片机。单片机接收到数据后,对其进行解码和处理,提取出有用的信息,如经度、纬度、速度等。然后,单片机将这些信息通过显示屏进行显示,供用户查看。
三、软件设计
软件设计部分主要包括单片机程序的编写以及GPS数据的解析和处理。单片机程序需要实现与GPS模块的通信、数据的接收、解析以及处理等功能。此外,还需要设计相应的显示程序,将处理后的数据以直观的方式显示在显示屏上。
四、硬件设计
硬件设计部分主要涉及单片机、GPS模块、显示屏以及接口电路的选择和连接。单片机的选择需要根据实际需求来确定,需要考虑到其性能、功耗、价格等因素。GPS模块则需要选择具有高精度、高稳定性的产品。显示屏的选择则需要根据显示需求来确定,如分辨率、颜色等。接口电路的设计则需要确保数据的稳定传输和可靠连接。
五、仿真设计
仿真设计部分主要是通过计算机软件模拟整个系统的运行情况。通过搭建仿真模型,可以对系统的性能进行评估和优化。在仿真过程中,可以模拟不同的场景和条件,测试系统的稳定性和可靠性。
六、优化与扩展
为了提高系统的性能和精度,可以采取一系列优化措施,如优化算法、提高硬件性能等。此外,还可以根据实际需求对系统进行扩展,如增加其他传感器模块、实现与其他设备的通信等。
综上所述,基于单片机的GPS全球定位系统仿真设计是一个综合性的项目,需要综合考虑硬件设计、软件编程、信号处理等多个方面。通过合理的设计和实现,可以实现对GPS信号的接收、处理和显示,为各种应用提供精确的位置和时间信息。
二、功能设计
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。
三、 软件设计
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
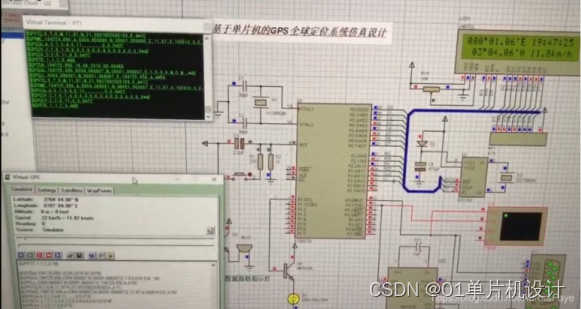
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图

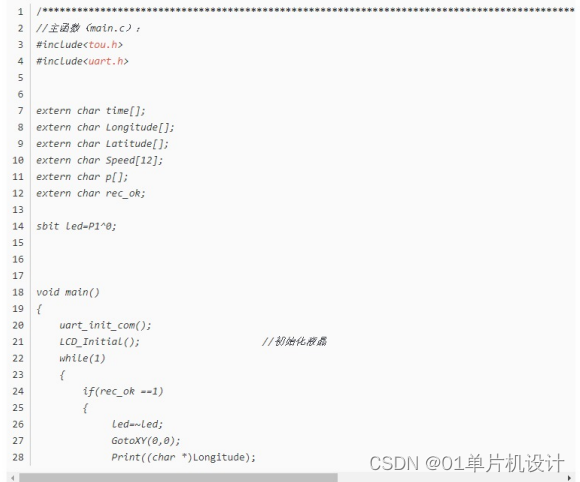
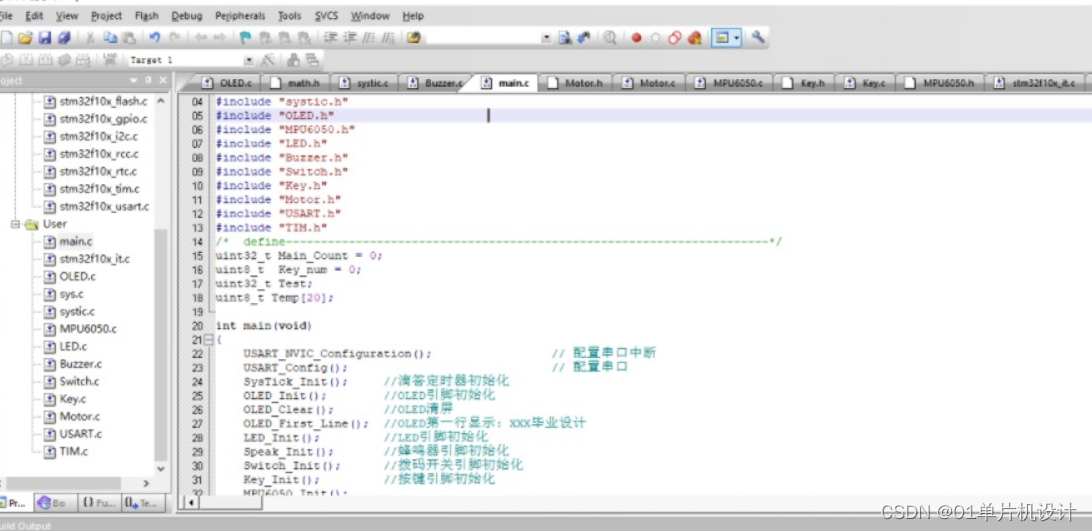
五、 程序
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25















 3476
3476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









