








本人认为这篇文章最大的创新就是这个图对比降噪,降噪也是数据处理方面值得考虑和继续创新的一个点。
摘要:
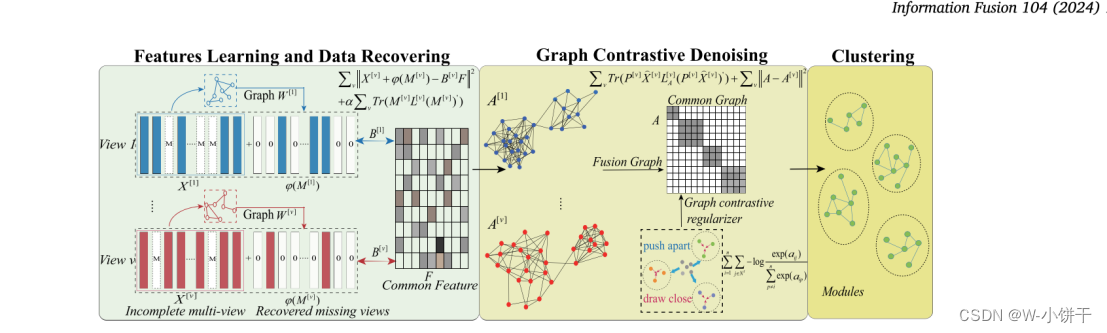
我们提出了一种新的不完全多视图聚类统一图对比学习框架(UGCF),它联合学习数据恢复、图对比去噪和聚类。具体来说,UGCF首先通过利用每个视图中的保守关系恢复丢失的值,并保留数据中的局部结构。其次,UGCF通过学习每个视图对象的关联结构来消除多视图数据的异构性,并通过操纵关联图的拓扑结构来构建多视图数据的统一图。为了提高顶点特征的质量,通过选择正、负样本对统一的图进行图对比学习,大大提高了特征的判别性,从而消除了数据中的噪声。最后,UGCF将数据恢复、图对比去噪和聚类集成到一个总体目标中。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









