






这是我自己配置HC-05蓝牙模块的一些经验,如果有什么其他问题可以在评论区告诉我。我用的开发板是stm32f407演示为例。
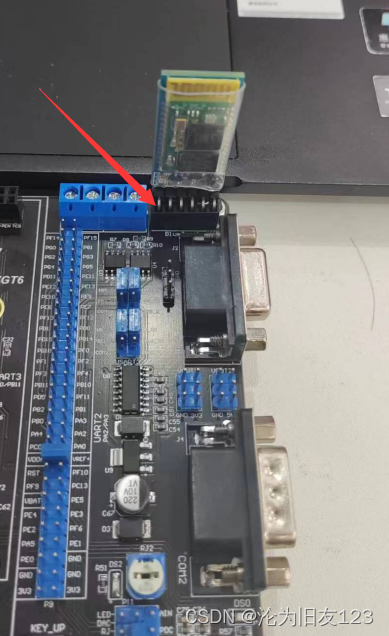
首先把蓝牙插在开发板的这个卡槽上,


1 首先是LED.C和LED.h文件
LED.c
#include "stm32f4xx.h"
#include "led.h"
void LED_init()
{
//LED0 ----》 PF9 LED2 ----> PF10
//1、定义外设结构变量
GPIO_InitTypeDef GPIO_InitStructure;
//打开外设时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
//2、对外设结构体成员进行初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //选择配置的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //输出类型
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //引脚速率
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上下拉电阻
//3、调用对应的外设初始化函数
GPIO_Init(GPIOF, &GPIO_InitStructure);
GPIO_SetBits(GPIOF, GPIO_Pin_9); //默认不亮
GPIO_SetBits(GPIOF, GPIO_Pin_10);
}
LED.h
#ifndef _LED_H
#define _LED_H
#include "sys.h"
void LED_init(void);
#endif
2第二个是buletooth.c和buletooth.h文件
buletooth.c文件
#include "stm32f4xx.h"
#include "buletooth.h"
void BULETOOTH_init(uint32_t BaudRate)
{
//buletooth ------ USART3
//PB11-----USART1_RX PB10----USART1_TX
//定义外设结构体变量
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//使能 GPIOB 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//使能 USART3 串口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//配置 GPIO端口串口复用模式
GPIO_PinAFConfig(GPIOB, GPIO_PinSource11, GPIO_AF_USART3);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10, GPIO_AF_USART3);
//配置GPIO引脚并初始化为 复用模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_10;//选择配置的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //输出类型
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //引脚速率
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上下拉电阻
GPIO_Init(GPIOB, &GPIO_InitStructure);
//配置串口参数
USART_InitStructure.USART_BaudRate = BaudRate; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure);
//配置NVIC中断
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //中断编号
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0F;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断通道
NVIC_Init(&NVIC_InitStructure);
//配置中断触发方式
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //接收数据
//使能串口
USART_Cmd(USART3, ENABLE);
}buletooth.h
#ifndef _BULETOOTH_H
#define _BULETOOTH_H
#include "sys.h"
void BULETOOTH_init(uint32_t BaudRate);
#endif最后是main函数
#include "stm32f4xx.h" //必须包含
#include "led.h"
#include "buletooth.h"
uint16_t blue_data = 0; //全局变量,接收蓝牙的数据
//程序的入口
int main()
{
LED_init();
BULETOOTH_init(9600);
while(1) //A事件
{
if(blue_data == 'A')
{
GPIO_ResetBits(GPIOF, GPIO_Pin_9); //亮
}
else if(blue_data == 'B')
{
GPIO_SetBits(GPIOF, GPIO_Pin_9); //灭
}
}
}
void USART3_IRQHandler(void) //串口3中断服务函数
{
/*
判断usart3 是否接收到了数据
由于接收数据需要等移位寄存器接收数据,然后将数据移到接收数据寄存器中去,
这些操作需要花费时间,如果我们不等数据接收完就马上进行下一个数据的接收,
那么就会导致后面的数据将前面的数据给覆盖掉,这样的话数据就出现了错误
*/
if(USART_GetITStatus(USART3, USART_IT_RXNE) == SET)
{
//如果接收到数据,就存到data中
blue_data = USART_ReceiveData(USART3);
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
}
}














 6274
6274











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









