






MPU6050六轴姿态传感器概述
MPU6050是一款集成了3轴陀螺仪和3轴加速度计的六轴姿态传感器,广泛应用于需要实时姿态检测的各种场合。它具备高精度的传感器测量能力,能够检测微小的加速度和角速度变化,并通过数字输出接口提供数据,便于与微控制器或其他设备进行通信和交互。MPU6050内部集成的数字运动处理器(DMP)能够处理传感器数据,输出旋转矩阵、四元数和欧拉角等形式的融合演算数据,极大地降低了对外部处理器的依赖,提高了数据的准确性和稳定性。
MPU6050的工作原理
MPU6050的工作原理涉及陀螺仪和加速度计两个主要部分。陀螺仪用于测量物体的角速,而加速度计则用于测量物体的线性加速度。MPU6050通过内置的三个16位模数转换器(ADC)对陀螺仪和加速度计的模拟信号进行数字化处理,然后通过内部算法处理这些数据,最终输出姿态信息。此外,MPU6050还配备了低通滤波器,用户可以根据需要调整测量范围,以适应不同的工作环境和应用需求。
模块介绍:
mpu6050是IMU模块驱动文件,使用该模块可以读取到6轴数据
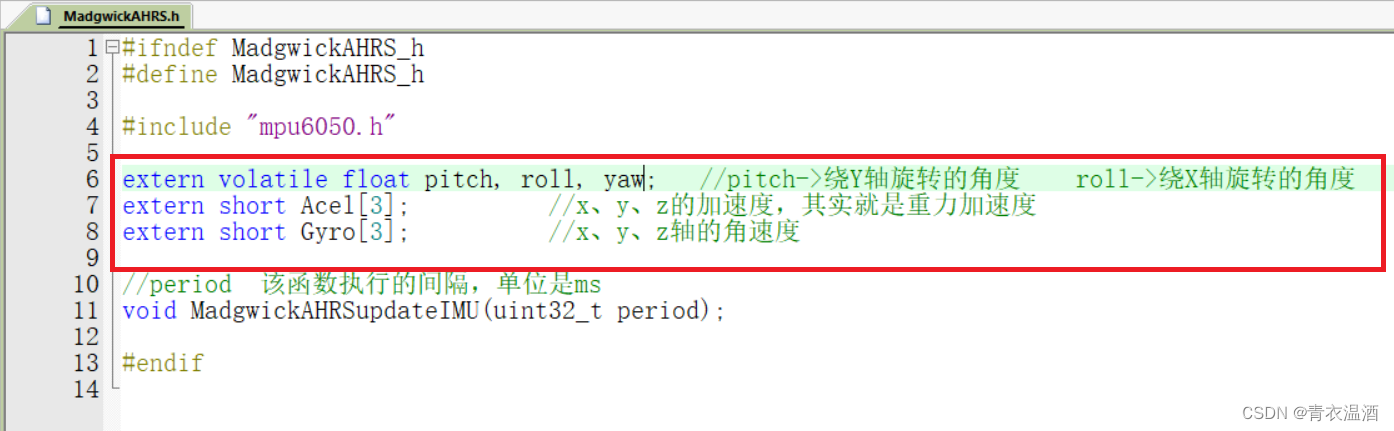
MadgwickAHRS是姿态角计算模块,使用该模块可以将6轴数据进行互补滤波并计算出姿态角
模块使用方法:
1. 将MadgwickAHRS.c和mpu6050.c添加到工程中
2. 调用MPU6050_Init()函数对IMU进行初始化
3. 在while(1)中周期调用MadgwickAHRSupdateIMU(10);函数,参数中的10表示调用间隔,单位是ms
4. 使用MadgwickAHRS.h文件中定义的变量即可
5.在 int main(void) 中初始化 MPU6050_Init();
在 while(1)中输入以下代码
while(1)
{
Delay_ms(10);
system_time = system_time + 10;
MadgwickAHRSupdateIMU(10); //该函数的执行间隔是10ms
if(system_time%100) //每100ms通过串口打印一次数据
{
printf("%f,%f,%f\r\n",pitch,roll,yaw);
}
if(pitch >60 || pitch <-60 || roll>60 || roll<-60)
{
warnning_state = 1;
}else
{
warnning_state = 0;
}
if(system_time%100 == 0 && warnning_state == 1)
{
if(beep_state==1)
{
GPIO_SetBits(GPIOI,GPIO_Pin_11);
beep_state = 0;
}
else
{
GPIO_ResetBits(GPIOI,GPIO_Pin_11);
beep_state = 1;
}
}
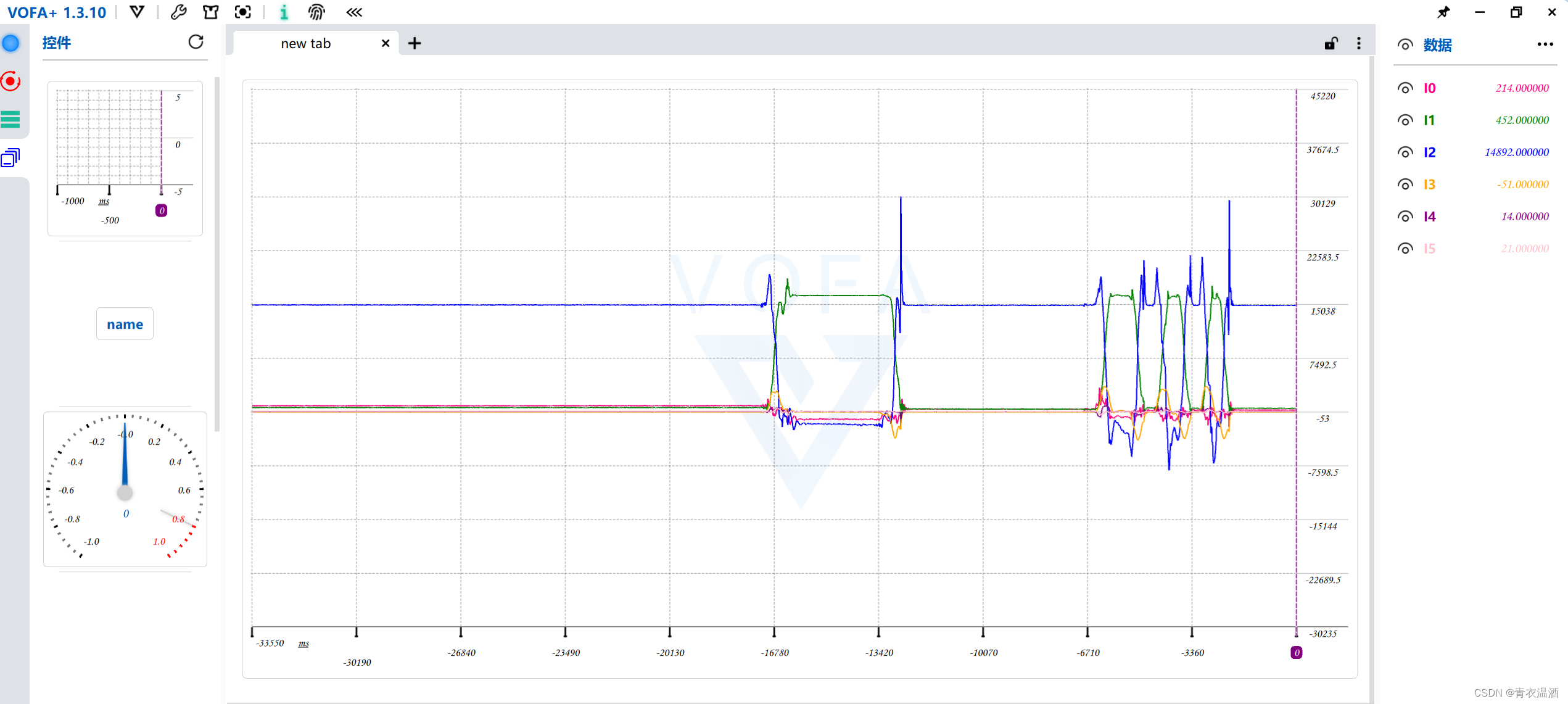
使用VoFA+查看IMU6轴数据:















 8674
8674











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









