







一、PWM生成方波
C51是用软件的方式进行模拟出方波
STM32F103C8T6中硬件就可以生成PWM方波,芯片中的PWM资源
高级定时器(TIM1):7路
通用定时器(TIM2-TIM4):各4路
共19路PWM
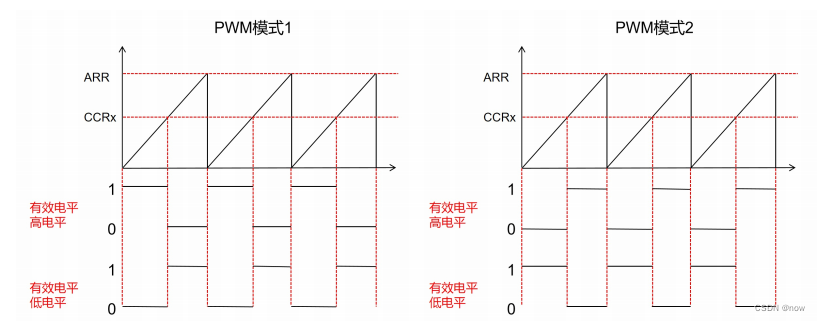
二、PWM输出模式
| pwm模式1 | 在向上计数时,一旦CNT<CCRx时输出为有效电平,否则为无效电平; 在向下计数时,一旦CNT>CCRx时输出为无效电平,否则为有效电平。 |
| pwm模式2 | 在向上计数时,一旦CNT<CCRx时输出为无效电平,否则为有效电平; 在向下计数时,一旦CNT>CCRx时输出为有效电平,否则为无效电平。 |
有效电平可以是高电平,也可以是低电平
三、 pwm周期与频率:

溢出时间:Tout
占空比:由CCRx决定,有效电平占一个周期的比例














 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









