






轮子推荐ABBA,当然BAAB也可以
如图安放:

这两种安防位置可以实现平移效果
若要实现平移则需要先实现PID控制平衡,这里用到520编码电机,相较于370电机他的动力更足,在调节PID时能节约不少时间而且更加容易。
需要注意的是:
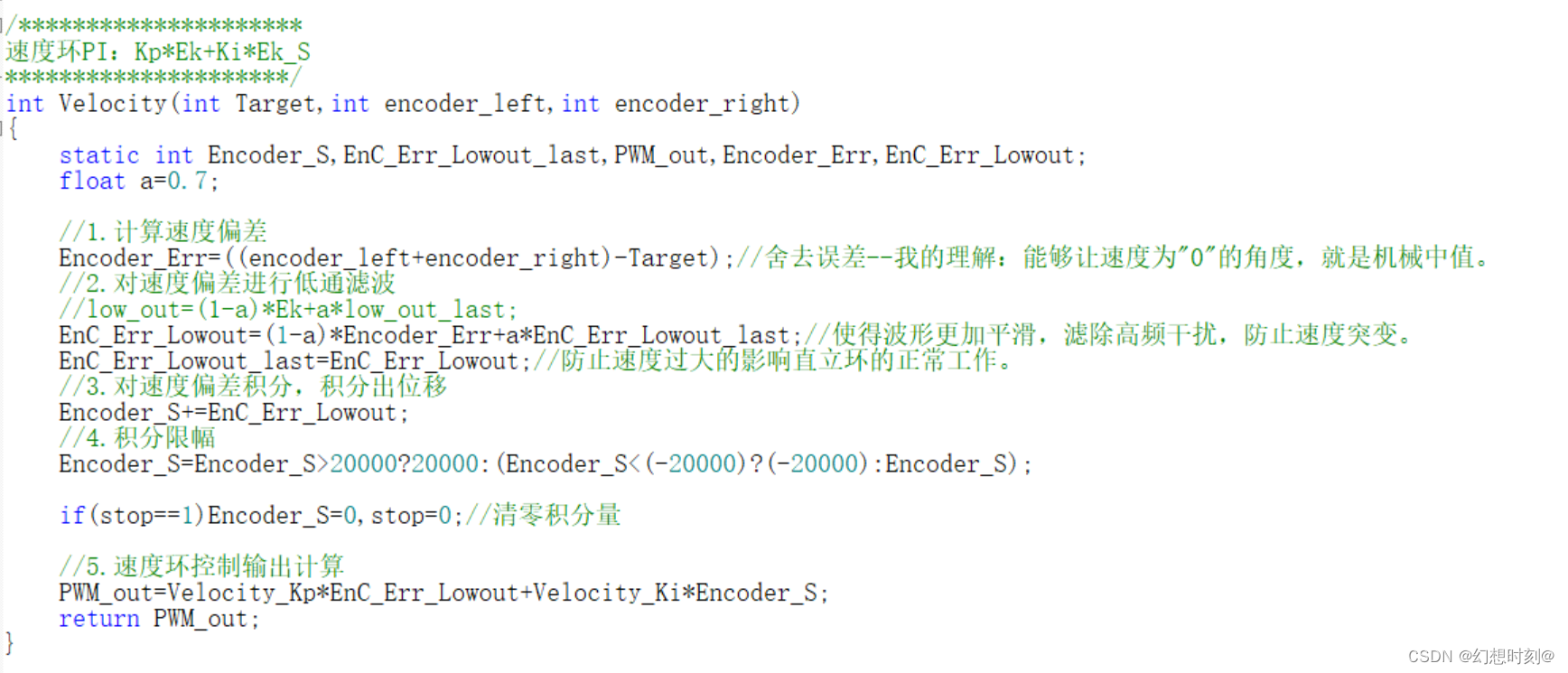
写速度环PID时需要传进去实际速度,实际速度需要两个编码器进行测量,这里我们四个轮子上分别带了一个编码器,也就是四个编码器。
那我们应该选择哪两个轮子呢?
必须是一个A轮一个B轮
选择这两个轮子之后,通过调整极性,让他们前进时编码器测出来的都为正数,后退时编码器测出来的都为负数。然后将这两个值传进速度环之中。在平移时给相应的速度差,才能进行平移操作。
如果选择两个A轮或两个B轮或出现的问题:
在平移时,假设两个A轮向前,两个B轮向后,这时是右平移。那么此时会出现一个问题,假设你编码器电机选择的是两个A轮,那么这两个都是正数,将两个正数传进速度环PID,速度偏差会很大,最终导致速度环的值偏大。
由下图计算可知速度环偏大。
而速度环的值是作为参数传入直立环的,那么会进一步导致直立环算出的结果偏大,输出的PWM也会偏大,假设此时输出的PWM为正值,那么A轮速度会进一步增大,因为A轮本身就是正数;而B轮速度会进一步减小,B轮本身是负数,加上一个正值,速度会变小。所以整体现象就是两个A轮在转动而B轮好像没有转动。然后看到的就是小车会往左上,左下,右上,右下平移,而导致不能正常的左右平移。

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









