







舵机PWM在配置时,一定要选择50HZ,否则舵机不能转到相应的角度
main函数
#include "ti_msp_dl_config.h"
#include "OLED.h"
#include "stdio.h"
#include "Servo.h"
volatile unsigned int delay_times = 0;
//搭配滴答定时器实现的精确ms延时
void delay_ms(unsigned int ms)
{
delay_times = ms;
while( delay_times != 0 );
}
int a=0;
volatile uint8_t gEchoData = 0;
int main(void)
{
uint8_t str[64];
SYSCFG_DL_init();
//NVIC_EnableIRQ(TIMER_0_INST_INT_IRQN);
// DL_TimerA_startCounter(TIMER_0_INST);
delay_ms(500) ;
OLED_Init();
OLED_Fill(0x00);
DL_TimerG_startCounter(PWM_Servo_INST ); //初始化舵机
NVIC_ClearPendingIRQ(UART_2_INST_INT_IRQN); //串口中断 先清除中断,防止直接进中断
NVIC_EnableIRQ(UART_2_INST_INT_IRQN);
while (1)
{
sprintf((char *)str, "%d", a);
OLED_ShowStr(0,4, str,2);
delay_ms(1000) ;
Servo_SetAngle(180);
a++;
delay_ms(1000) ;
Servo_SetAngle(90);
a++;
delay_ms(1000) ;
Servo_SetAngle(0);
a++;
}
}
void UART_2_INST_IRQHandler(void) //蓝牙串口
{
switch (DL_UART_Main_getPendingInterrupt(UART_2_INST)) {
case DL_UART_MAIN_IIDX_RX:
gEchoData = DL_UART_Main_receiveData(UART_2_INST);
if (gEchoData==0x00)
{
a=0;
}
if (gEchoData==0x01)
{
a=1;
}
if (gEchoData==0x05)
{
a=2;
}
if (gEchoData==0x07)
{
a=3;
}
if (gEchoData==0x03)
{
a=4;
}
break;
default:
break;
}
}
void SysTick_Handler(void)
{
if( delay_times != 0 )
{
delay_times--;
}
}
舵机.c
#include "ti_msp_dl_config.h"
#include "Servo.h"
float b=0;
void Servo_SetAngle(float Angle)
{
b=2000-(Angle / 180 * 200 + 50);
DL_TimerG_setCaptureCompareValue(PWM_Servo_INST, b, DL_TIMER_CC_0_INDEX);
}
舵机.h
#ifndef __Servo_H
#define __Servo_H
#include "ti_msp_dl_config.h"
void Servo_SetAngle(float Angle);
#endif相关配置:

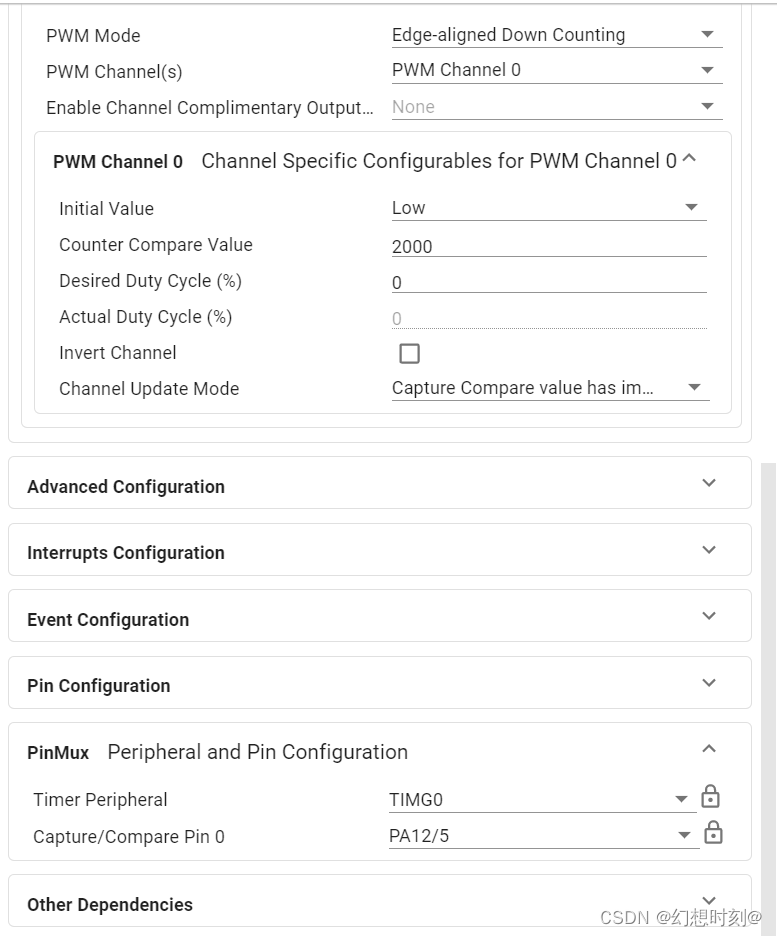
OLED和串口部分在之前已经发过
















 891
891











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









