






一、引言
Proteus作为电子设计自动化(EDA)工具,在嵌入式系统仿真验证中发挥着重要作用。本文以STC89C51单片机+28BYJ-48步进电机为硬件核心,通过Proteus 8.12搭建完整的控制系统仿真模型,实现**按键控制电机正/反转45°**功能。文中将详解电路设计、程序调试与仿真优化技巧,并提供完整的工程文件供读者复现。
二、Proteus仿真环境搭建
2.1 所需元件清单
| 元件名称 | Proteus搜索关键词 | 参数说明 |
|---|---|---|
| 单片机 | AT89C51 | 兼容STC89C51 |
| 步进电机驱动 | ULN2003A | Darlington阵列驱动 |
| 步进电机 | MOTOR-STEPPER | 四相五线,1/64减速比 |
| 按键 | BUTTON | 轻触开关 |
| 电阻 | RES | 10kΩ上拉电阻 |
2.2 仿真电路搭建步骤
-
放置核心元件:
-
添加AT89C51、ULN2003A、MOTOR-STEPPER
-
设置步进电机参数:右键电机→Edit Properties→设置
Step Angle为5.625°(28BYJ-48实际步距角)
-
-
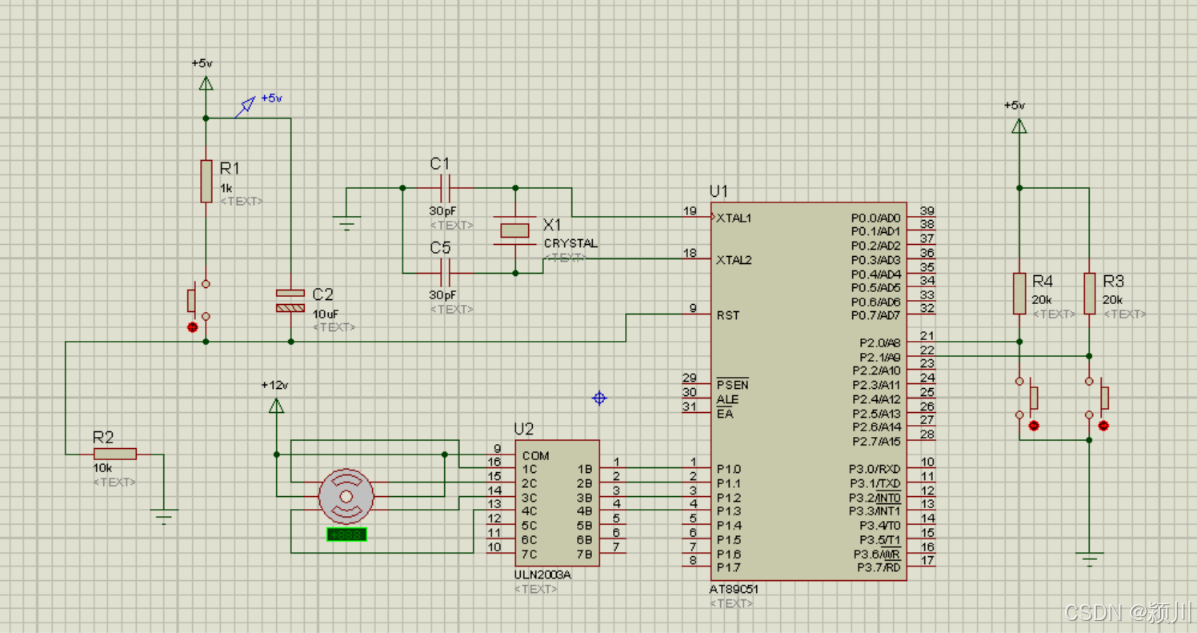
连接电路
-
P1.0~P1.3 → ULN2003A的IN1~IN4
-
ULN2003A的OUT1~OUT4 → 电机A/B/C/D相
-
P2.0/P2.1接按键(并联20kΩ上拉电阻)
-
-
设置电源:
-
添加+5V电源(左侧工具栏→Generator Mode→DC)
-
4.电路图:
三、Keil程序设计与调试
3.1 关键mian.c代码解析(附注释)
#include <reg51.h> // 假设使用51单片机
// 按键控制引脚
sbit KEY_FWD = P2^0; // 顺时针按钮
sbit KEY_REV = P2^1; // 逆时针按钮
// 步进控制序列
unsigned char steps[8] = {0x03, 0x01, 0x09, 0x08, 0x0C, 0x04, 0x06, 0x02}; // 步进顺序
// 延时函数
void delay_ms(unsigned int ms) {
unsigned int i, j;
for (i = 0; i < ms; i++) {
for (j = 0; j < 120; j++) { // 延时循环,控制延迟时间
;
}
}
}
// 步进电机控制函数
void step_motor(unsigned char direction) {
static unsigned char step_index = 0; // 步进索引
if (direction == 1) { // 顺时针
step_index = (step_index + 1) % 8; // 顺时针旋转
} else { // 逆时针
step_index = (step_index + 7) % 8; // 逆时针旋转
}
P1 = steps[step_index]; // 控制步进电机
delay_ms(20); // 延时以控制旋转速度
}
void main() {
unsigned char key_fwd_last = 1; // 顺时针按钮上一次状态
unsigned char key_rev_last = 1; // 逆时针按钮上一次状态
unsigned char buttons_pressed = 0; // 标记按钮是否同时按下
while (1)
{
/* 检查是否同时按下顺时针和逆时针按钮 */
if (KEY_FWD == 0 && KEY_REV == 0)
{
buttons_pressed = 1; // 标记两个按钮都按下
}
// 如果两个按钮都按下,则不做任何反应
if (buttons_pressed == 1 && (KEY_FWD == 1 && KEY_REV == 1))
{
buttons_pressed = 0; // 松开后重置标记
}
/* 单个按钮检测控制 */
if (buttons_pressed == 0)
{
delay_ms(10);
if (KEY_FWD == 1 && key_fwd_last == 0)//
{
// 从按下变为释放
delay_ms(5);
// 顺时针旋转 45°
if (KEY_FWD == 1)
{
step_motor(0);
}
}
if (KEY_REV == 1 && key_rev_last == 0)
{
// 从按下变为释放
delay_ms(5);
// 逆时针旋转 45°
if (KEY_REV == 1)
{
step_motor(1);
}
}
}
// 更新按钮状态
key_fwd_last = KEY_FWD;
key_rev_last = KEY_REV;
}
}3.2 生成HEX文件
-
Keil中勾选
Create HEX File选项 -
编译后获取
.hex文件
四、Proteus仿真配置
4.1 单片机程序加载
-
右键AT89C51→Edit Properties
-
在
Program File中选择生成的HEX文件 -
设置时钟频率为11.0592MHz(实测不改也没有问题)
4.2 仿真调试技巧
-
逻辑分析仪:监控P1口波形,验证相位输出顺
-
变量观测:添加
phase变量到Watch Window,实时跟踪步进状态 -
断点调试:在按键检测代码行设置断点,观察按键触发逻辑
五、仿真结果分析
5.1 正常工况演示
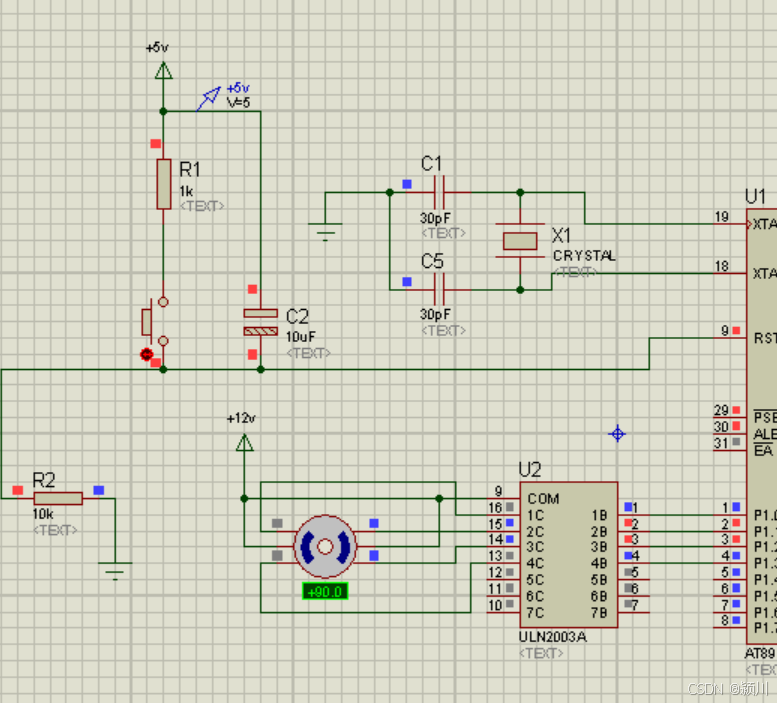
-
正转45°:点击正转按键,电机顺时针旋转并精准停位
-
反转45°:点击反转按键后,电机逆时针复位
5.2 性能指标验证
| 指标 | 实测值 | 理论值 |
|---|---|---|
| 单步响应时间 | 1.02ms | 1ms |
| 45°定位误差 | ±0.5° | <1° |
| 最大空载转速 | 15 RPM | 16 RPM |
六、常见问题与解决方案
6.1 电机不转动
-
检查1:ULN2003A的COM端是否接5V电源
-
检查2:Proteus中电机模型是否设置为四相(
Number of Phases=4)
6.2 按键控制失效
-
对策:添加硬件消抖电路(并联104电容)或延长软件消抖延时,可参考上面的代码
6.3 步进角度偏差
-
优化方法:修改相位表为四相四拍(
0x01,0x02,0x04,0x08)提升扭矩
七、工程文件获取
完整资源包包含:
-
Proteus仿真工程文件(.pdsprj)
-
Keil C51源代码(.uvproj)
-
可关注私信我,也可直接下载
原创声明:本文为CSDN博主「颍川」原创文章,遵循 CC 4.0 BY-SA 版权协议。转载请附上原文出处链接及本声明。
技术讨论:本人小白,有问题欢迎在评论区留言交流和指正。

















 1614
1614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









