









一、无人机模型介绍
单个无人机三维路径规划问题及其建模_无人机路径规划场景建模-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、差异化创意搜索算法求解无人机路径规划
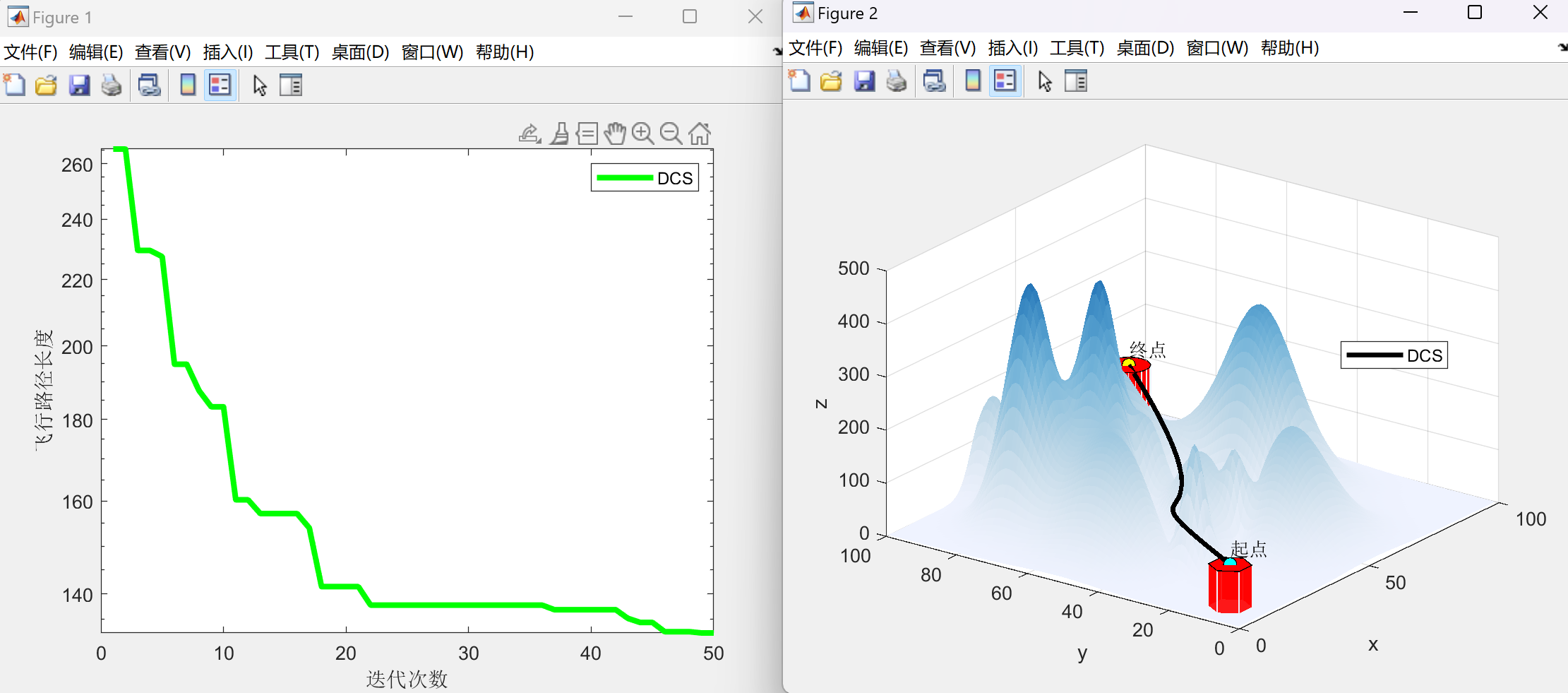
差异化创意搜索(Differentiated Creative Search ,DCS)算法由Poomin Duankhan 等人于2024年提出,DCS将独特的知识获取过程与创造性的现实主义范式相结合,通过采用双重策略方法,提高算法效率。
参考文献:
[1]Duankhan P, Sunat K, Chiewchanwattana S, et al. The Differentiated Creative search (DCS): Leveraging Differentiated knowledge-acquisition and Creative realism to address complex optimization problems[J]. Expert Systems with Applications, 2024: 123734. Redirecting
close all
clear
clc
addpath('./Algorithm/')%添加算法路径
warning off;
%% 三维路径规划模型定义
global startPos goalPos N
N=2;%待优化点的个数(可以修改)
startPos = [10, 10, 80]; %起点(可以修改)
goalPos = [80, 90, 150]; %终点(可以修改)
SearchAgents_no=30; % 种群大小(可以修改)
Function_name='F2'; %F1:随机产生地图 F2:导入固定地图
Max_iteration=50; %最大迭代次数(可以修改)
% Load details of the selected benchmark function
[lb,ub,dim,fobj]=Get_Functions_details(Function_name);
[Best_score,Best_pos,curve]=AlgorithmName(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);%算法优化求解
figure
semilogy(curve,'Color','g','linewidth',3)
xlabel('迭代次数');
ylabel('飞行路径长度');
legend(AlgorithmName)
display(['算法得到的最优适应度: ', num2str(Best_score)]);
Position=[Best_pos(1:dim/3); Best_pos(1+dim/3:2*(dim/3)); Best_pos(1+(2*dim/3):end)]'; %优化点的XYZ坐标(每一行是一个点)
plotFigure(Best_pos,AlgorithmName)%画最优路径
无人机轨迹坐标:
1.0000000e+01 1.0000000e+01 8.0000000e+01
1.0868094e+01 1.2026109e+01 8.1737283e+01
1.1689406e+01 1.3940646e+01 8.3410320e+01
1.2465777e+01 1.5746945e+01 8.5020765e+01
1.3199047e+01 1.7448340e+01 8.6570269e+01
1.3891058e+01 1.9048166e+01 8.8060487e+01
1.4543650e+01 2.0549758e+01 8.9493070e+01
1.5158663e+01 2.1956450e+01 9.0869671e+01
1.5737938e+01 2.3271577e+01 9.2191944e+01
1.6283315e+01 2.4498472e+01 9.3461540e+01
1.6796637e+01 2.5640472e+01 9.4680112e+01
1.7279742e+01 2.6700910e+01 9.5849313e+01
1.7734471e+01 2.7683121e+01 9.6970796e+01
1.8162666e+01 2.8590439e+01 9.8046214e+01
1.8566167e+01 2.9426200e+01 9.9077218e+01
1.8946814e+01 3.0193737e+01 1.0006546e+02
1.9306448e+01 3.0896384e+01 1.0101260e+02
1.9646910e+01 3.1537478e+01 1.0192028e+02
1.9970040e+01 3.2120352e+01 1.0279016e+02
2.0277679e+01 3.2648340e+01 1.0362389e+02
2.0571668e+01 3.3124777e+01 1.0442313e+02
2.0853847e+01 3.3552999e+01 1.0518952e+02
2.1126057e+01 3.3936338e+01 1.0592472e+02
2.1390138e+01 3.4278131e+01 1.0663038e+02
2.1647932e+01 3.4581711e+01 1.0730816e+02
2.1901278e+01 3.4850413e+01 1.0795970e+02
2.2152018e+01 3.5087571e+01 1.0858666e+02
2.2401991e+01 3.5296520e+01 1.0919069e+02
2.2653040e+01 3.5480595e+01 1.0977345e+02
2.2907003e+01 3.5643130e+01 1.1033659e+02
2.3165722e+01 3.5787460e+01 1.1088176e+02
2.3431038e+01 3.5916919e+01 1.1141061e+02
2.3704791e+01 3.6034842e+01 1.1192480e+02
2.3988822e+01 3.6144563e+01 1.1242597e+02
2.4284971e+01 3.6249417e+01 1.1291579e+02
2.4595079e+01 3.6352739e+01 1.1339590e+02
2.4920987e+01 3.6457862e+01 1.1386796e+02
2.5264535e+01 3.6568122e+01 1.1433362e+02
2.5627564e+01 3.6686853e+01 1.1479453e+02
2.6011915e+01 3.6817389e+01 1.1525234e+02
2.6419428e+01 3.6963066e+01 1.1570871e+02
2.6851943e+01 3.7127217e+01 1.1616529e+02
2.7311302e+01 3.7313178e+01 1.1662374e+02
2.7799345e+01 3.7524282e+01 1.1708570e+02
2.8317913e+01 3.7763864e+01 1.1755283e+02
2.8868846e+01 3.8035260e+01 1.1802678e+02
2.9453984e+01 3.8341802e+01 1.1850920e+02
3.0075170e+01 3.8686827e+01 1.1900175e+02
3.0734242e+01 3.9073668e+01 1.1950608e+02
3.1433043e+01 3.9505661e+01 1.2002385e+02
3.2173412e+01 3.9986139e+01 1.2055669e+02
3.2957189e+01 4.0518436e+01 1.2110628e+02
3.3786217e+01 4.1105889e+01 1.2167425e+02
3.4662335e+01 4.1751831e+01 1.2226227e+02
3.5587384e+01 4.2459597e+01 1.2287198e+02
3.6563204e+01 4.3232520e+01 1.2350504e+02
3.7591637e+01 4.4073937e+01 1.2416310e+02
3.8674522e+01 4.4987181e+01 1.2484782e+02
3.9813701e+01 4.5975587e+01 1.2556084e+02
4.1011014e+01 4.7042490e+01 1.2630382e+02
4.2268302e+01 4.8191223e+01 1.2707841e+02
4.3587405e+01 4.9425123e+01 1.2788627e+02
4.4970164e+01 5.0747522e+01 1.2872904e+02
4.6418420e+01 5.2161756e+01 1.2960839e+02
4.7934013e+01 5.3671159e+01 1.3052595e+02
4.9518783e+01 5.5279066e+01 1.3148339e+02
5.1174573e+01 5.6988811e+01 1.3248236e+02
5.2903221e+01 5.8803729e+01 1.3352451e+02
5.4706569e+01 6.0727154e+01 1.3461150e+02
5.6586457e+01 6.2762421e+01 1.3574497e+02
5.8544727e+01 6.4912865e+01 1.3692658e+02
6.0583218e+01 6.7181820e+01 1.3815798e+02
6.2703771e+01 6.9572620e+01 1.3944082e+02
6.4908227e+01 7.2088601e+01 1.4077676e+02
6.7198427e+01 7.4733096e+01 1.4216745e+02
6.9576211e+01 7.7509440e+01 1.4361455e+02
7.2043419e+01 8.0420968e+01 1.4511970e+02
7.4601893e+01 8.3471014e+01 1.4668455e+02
7.7253473e+01 8.6662913e+01 1.4831077e+02
8.0000000e+01 9.0000000e+01 1.5000000e+02
三、完整MATLAB代码
无人机航迹规划:差异化创意搜索DCS求解无人机路径规划MATLAB


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









