







true);
if (ref) {
//引用项的node字段保存了Binder对象节点的指针
//复制给target_node
target_node = binder_get_node_refs_for_txn(
ref->node, &target_proc,
&return_error);
} else {
//…
}
//…
} else {
//把管理进程的节点名放到target_node中
target_node = context->binder_context_mgr_node;
//…
}
- 搜寻目标线程
if (!(tr->flags & TF_ONE_WAY) && thread->transaction_stack) {
struct binder_transaction *tmp;
tmp = thread->transaction_stack;
//…
while (tmp) {
struct binder_thread *from;
spin_lock(&tmp->lock);
from = tmp->from;
if (from && from->proc == target_proc) {
atomic_inc(&from->tmp_ref);
target_thread = from;
spin_unlock(&tmp->lock);
break;
}
spin_unlock(&tmp->lock);
tmp = tmp->from_parent;
}
}
上面这段代码的逻辑是:
-
如果本次调用不是异步调用,并且调用者线程中的
transaction_stack不为NULL,则在其中查找和本次调用具有相同目标进程的transaction_stack,如果找到,则把它的目标线程设置为本次调用的目标线程。 -
transaction_stack是一个列表,保存了本线程所有正在执行的Binder调用的binder_transaction结构体。 -
Binder驱动中用binder_transaction来保存一次Binder调用的所有数据,包括传递的数据、通信双发的进程、线程信息等。因为Binder调用涉及两个进程,还要向调用端传递返回值。 -
所以,驱动中用结构
binder_transaction保存还没结束的Binder调用。 -
通常情况下执行
Binder调用时不会存在相同进程的Binder调用,因此target_thread的值大多为NULL
- 如果有目标线程,则使用目标线程中的
todo队列,否则使用目标进程的todo队列
if (target_thread)
e->to_thread = target_thread->pid;
e->to_proc = target_proc->pid;
4.为当前的Binder调用创建binder_transaction结构,并用调用的数据填充它。
t = kzalloc(sizeof(*t), GFP_KERNEL);
//…
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
//…
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
t->sender_euid = task_euid(proc->tsk);
t->to_proc = target_proc;
t->to_thread = target_thread;
t->code = tr->code;
t->flags = tr->flags;
if (!(t->flags & TF_ONE_WAY) &&
binder_supported_policy(current->policy)) {
/* Inherit supported policies for synchronous transactions */
t->priority.sched_policy = current->policy;
t->priority.prio = current->normal_prio;
} else {
/* Otherwise, fall back to the default priority */
t->priority = target_proc->default_priority;
}
5.在目标进程(也就是服务端)的缓冲区分配空间,复制用户进程的数据到内核
t->buffer = binder_alloc_new_buf(&target_proc->alloc, tr->data_size,
tr->offsets_size, extra_buffers_size,
!reply && (t->flags & TF_ONE_WAY));
//…
if (copy_from_user(t->buffer->data, (const void __user *)(uintptr_t)
tr->data.ptr.buffer, tr->data_size)) {
//…
}
if (copy_from_user(offp, (const void __user *)(uintptr_t)
tr->data.ptr.offsets, tr->offsets_size)) {
//…
}
- 这里复制的数据是
Binder调用的参数数据,也是需要传递给服务进程的数据,因此需要缓冲区。这个缓冲区是在目标进程的大的缓冲区中分配的
- 处理传输中的
Binder对象
off_end = (void *)off_start + tr->offsets_size;
sg_bufp = (u8 *)(PTR_ALIGN(off_end, sizeof(void *)));
sg_buf_end = sg_bufp + extra_buffers_size;
off_min = 0;
for (; offp < off_end; offp++) {
//…
}
- 通过参数传递的
Binder对象需要进行转换,这里的for循环就是进行转换操作,内容较多,会在下面处理传递的Binder对象章节进行讲解
- 将本次调用的
binder_transaction结构体链接到线程的binder_stack列表中
if (!(t->flags & TF_ONE_WAY)) {
//…
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
// 书中下面注释部分的代码已经整合到 binder_proc_transaction 函数中了
// 首先,将结构 binder_transaction中的binder_work放到目标目标进程或线程的todo队列
// 然后,创建一个新的binder_work的结构体,并将它放到发送线程的todo队列
if (!binder_proc_transaction(t, target_proc, target_thread)) {
//… 失败处理
}
}
-
binder_transaction结构中包含了一个binder_work的结构体,因此它可以被放到todo队列中 -
本地调用时
binder_work的type被设置为BINDER_WORK_TRANSACTION后,插入了目标进程或目标线程的todo队列中 -
为了使客户进程能收到回复消息,这里也会创建一个新的
binder_work的结构体,并把它的type设置成了BINDER_WORK_TRANSAXTION_COMPLETET,并将它插入到当前线程的todo队列中
前面介绍过,在binder_thread_write函数执行完后,还会去判断是否需要执行binder_thread_read函数:
-
由于调用端执行完
BC_TRANSACTION后,会立刻执行ioctl的读指令 -
所以,在调用操作上,
binder_thread_read函数算是紧接着binder_thread_write函数后执行的
刚才新建的binder_work的结构体已经插入todo队列了,我们看下binder_thread_read函数会进行哪些和todo队列相关的操作:
while (1) {
//…
// 获得todo队列,获取失败则goto retry
if (!binder_worklist_empty_ilocked(&thread->todo))
list = &thread->todo;
else if (!binder_worklist_empty_ilocked(&proc->todo) &&
wait_for_proc_work)
list = &proc->todo;
else {
binder_inner_proc_unlock(proc);
/* no data added */
if (ptr - buffer == 4 && !thread->looper_need_return)
goto retry;
break;
}
//取出todo队列中的元素
w = binder_dequeue_work_head_ilocked(list);
//…
switch (w->type) {
//…省略大量case语句
case BINDER_WORK_TRANSACTION_COMPLETE: {
binder_inner_proc_unlock(proc);
cmd = BR_TRANSACTION_COMPLETE;
//把返回消息通过put_user放到用户空间的指针中
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
kfree(w);
binder_stats_deleted(BINDER_STAT_TRANSACTION_COMPLETE);
} break;
//…省略大量case语句
}
//…
}
binder_thread_read函数所做的处理就是把回复消息BR_TRANSACTION_COMPLETE复制到用户空间
这样客户进程就可以收到回复消息了
- 到这里,
客户进程的调用结束了。但是,Binder调用才完成一半,接下来,看看服务进程是如何调用数据的。
服务进程的调用流程
服务进程至少有一个线程会在ioctl上等待调用的到来。服务进程调用ioctl时传递的是读数据的请求,所以最后调用的也是binder_thread_read函数,我们看下binder_thread_read函数完整的处理流程:
- 如果保存返回结果的缓冲区中还没有数据,先写入
BR_NOOP消息:
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
- 进入循环处理所有
todo队列中的工作
while (1) {
//…
}
- 读取线程或进程
todo队列中需要完成的工作
struct binder_work *w = NULL;
//…
if (!binder_worklist_empty_ilocked(&thread->todo))
list = &thread->todo;
else if (!binder_worklist_empty_ilocked(&proc->todo) &&
wait_for_proc_work)
list = &proc->todo;
//…
w = binder_dequeue_work_head_ilocked(list);
- 用
switch语句处理所有类型的工作
switch (w->type) {
case BINDER_WORK_TRANSACTION: {
binder_inner_proc_unlock(proc);
t = container_of(w, struct binder_transaction, work);
} break;
}
-
经过
客户进程的调用流程后,此时的服务进程中已经存在一个类型为BINDER_WORK_TRANSACTION的工作需要处理 -
这里只是取出了和
binder_work关联的binder_transaction结构体指针 -
并保存到变量
t中
- 调整线程的优先级
if (!t)
continue;
if (t->buffer->target_node) {
struct binder_node *target_node = t->buffer->target_node;
struct binder_priority node_prio;
tr.target.ptr = target_node->ptr;
tr.cookie = target_node->cookie;
node_prio.sched_policy = target_node->sched_policy;
node_prio.prio = target_node->min_priority;
binder_transaction_priority(current, t, node_prio,
target_node->inherit_rt);
cmd = BR_TRANSACTION;
}
- 这里复制的数据是
Binder调用的参数数据,也是需要传递给服务进程的数据,因此需要缓冲区。这个缓冲区是在目标进程的大的缓冲区中分配的
- 处理传输中的
Binder对象
off_end = (void *)off_start + tr->offsets_size;
sg_bufp = (u8 *)(PTR_ALIGN(off_end, sizeof(void *)));
sg_buf_end = sg_bufp + extra_buffers_size;
off_min = 0;
for (; offp < off_end; offp++) {
//…
}
- 通过参数传递的
Binder对象需要进行转换,这里的for循环就是进行转换操作,内容较多,会在下面处理传递的Binder对象章节进行讲解
- 将本次调用的
binder_transaction结构体链接到线程的binder_stack列表中
if (!(t->flags & TF_ONE_WAY)) {
//…
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
// 书中下面注释部分的代码已经整合到 binder_proc_transaction 函数中了
// 首先,将结构 binder_transaction中的binder_work放到目标目标进程或线程的todo队列
// 然后,创建一个新的binder_work的结构体,并将它放到发送线程的todo队列
if (!binder_proc_transaction(t, target_proc, target_thread)) {
//… 失败处理
}
}
-
binder_transaction结构中包含了一个binder_work的结构体,因此它可以被放到todo队列中 -
本地调用时
binder_work的type被设置为BINDER_WORK_TRANSACTION后,插入了目标进程或目标线程的todo队列中 -
为了使
客户进程能收到回复消息,这里也会创建一个新的binder_work的结构体,并把它的type设置成了BINDER_WORK_TRANSAXTION_COMPLETET,并将它插入到当前线程的todo队列中
前面介绍过,在binder_thread_write函数执行完后,还会去判断是否需要执行binder_thread_read函数:
-
由于调用端执行完
BC_TRANSACTION后,会立刻执行ioctl的读指令 -
所以,在调用操作上,
binder_thread_read函数算是紧接着binder_thread_write函数后执行的
刚才新建的binder_work的结构体已经插入todo队列了,我们看下binder_thread_read函数会进行哪些和todo队列相关的操作:
while (1) {
//…
// 获得todo队列,获取失败则goto retry
if (!binder_worklist_empty_ilocked(&thread->todo))
list = &thread->todo;
else if (!binder_worklist_empty_ilocked(&proc->todo) &&
wait_for_proc_work)
list = &proc->todo;
else {
binder_inner_proc_unlock(proc);
/* no data added */
if (ptr - buffer == 4 && !thread->looper_need_return)
goto retry;
break;
}
//取出todo队列中的元素
w = binder_dequeue_work_head_ilocked(list);
//…
switch (w->type) {
//…省略大量case语句
case BINDER_WORK_TRANSACTION_COMPLETE: {
binder_inner_proc_unlock(proc);
cmd = BR_TRANSACTION_COMPLETE;
//把返回消息通过put_user放到用户空间的指针中
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
kfree(w);
binder_stats_deleted(BINDER_STAT_TRANSACTION_COMPLETE);
} break;
//…省略大量case语句
}
//…
}
-
binder_thread_read函数所做的处理就是把回复消息BR_TRANSACTION_COMPLETE复制到用户空间 -
这样
客户进程就可以收到回复消息了
到这里,客户进程的调用结束了。但是,Binder调用才完成一半,接下来,看看服务进程是如何调用数据的。
服务进程的调用流程
服务进程至少有一个线程会在ioctl上等待调用的到来。服务进程调用ioctl时传递的是读数据的请求,所以最后调用的也是binder_thread_read函数,我们看下binder_thread_read函数完整的处理流程:
- 如果保存返回结果的缓冲区中还没有数据,先写入
BR_NOOP消息:
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
- 进入循环处理所有
todo队列中的工作
while (1) {
//…
}
- 读取线程或进程
todo队列中需要完成的工作
struct binder_work *w = NULL;
//…
if (!binder_worklist_empty_ilocked(&thread->todo))
list = &thread->todo;
else if (!binder_worklist_empty_ilocked(&proc->todo) &&
wait_for_proc_work)
list = &proc->todo;
//…
w = binder_dequeue_work_head_ilocked(list);
- 用
switch语句处理所有类型的工作
switch (w->type) {
case BINDER_WORK_TRANSACTION: {
binder_inner_proc_unlock(proc);
t = container_of(w, struct binder_transaction, work);
} break;
}
-
经过
客户进程的调用流程后,此时的服务进程中已经存在一个类型为BINDER_WORK_TRANSACTION的工作需要处理 -
这里只是取出了和
binder_work关联的binder_transaction结构体指针 -
并保存到变量
t中
- 调整线程的优先级
if (!t)
continue;
if (t->buffer->target_node) {
struct binder_node *target_node = t->buffer->target_node;
struct binder_priority node_prio;
tr.target.ptr = target_node->ptr;
tr.cookie = target_node->cookie;
node_prio.sched_policy = target_node->sched_policy;
node_prio.prio = target_node->min_priority;
binder_transaction_priority(current, t, node_prio,
target_node->inherit_rt);
cmd = BR_TRANSACTION;
}
-
如果t为NULL,继续循环
-
否则,开始准备返回的消息
BR_TRANSACTION -
同时,设置线程的优先级
-
如果
调用线程的优先级低于当前线程指定的最低优先级,则把当前线程的优先级设为调用线程的优先级 -
否则,把
当前线程设为指定的最低优先级 -
这意味着
Binder线程会以尽量低的优先级运行
- 准备返回的数据
tr.code = t->code;
tr.flags = t->flags;
tr.sender_euid = from_kuid(current_user_ns(), t->sender_euid);
//…
// 让tr中的data指针指向内核中保存的数据缓冲区
tr.data_size = t->buffer->data_size;
tr.offsets_size = t->buffer->offsets_size;
tr.data.ptr.buffer = (binder_uintptr_t)
((uintptr_t)t->buffer->data +
binder_alloc_get_user_buffer_offset(&proc->alloc));
tr.data.ptr.offsets = tr.data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
// 把 BR_TRANSACTION 消息复制到用户空间
if (put_user(cmd, (uint32_t __user *)ptr)) {
//…
return -EFAULT;
}
ptr += sizeof(uint32_t);
if (copy_to_user(ptr, &tr, sizeof(tr))) {
//把结构体tr数据复制到用户空间
//…
return -EFAULT;
}
ptr += sizeof(tr);
//…
break;//跳出while循环
这一段代码都是为消息BR_TRANSACTION准备返回数据,要注意的是:
-
调用
copy_to_user复制到用户空间的只是结构体tr的数据 -
服务进程得到这个结构体之后,会直接读取它里面的data指针的数据 -
数据准备完毕后,使用
break语句跳出while循环
- 启动新线程
if (proc->requested_threads == 0 &&
list_empty(&thread->proc->waiting_threads) &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
/*spawn a new thread if we leave this out */) {
proc->requested_threads++;
//…
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
}
当前线程要执行Binder调用,新来的调用也需要线程来处理,因此:
-
函数结束前会检查进程中可用的线程数
-
如果需要创建新线程,则在返回的
buffer数据中增加BR_SPAWN_LOOPER消息,服务进程收到这个消息会启动新的线程
完整的Binder调用过程还需要把回复消息传递给客户进程,这个过程使用的函数还是前面的这些,暂时不分析了。消化一下先
前面介绍了Binder对象传递的原理和用户层的实现。(原理上整个人还是晕晕的),我们来看下Binder驱动如何实现Binder对象的传递的。
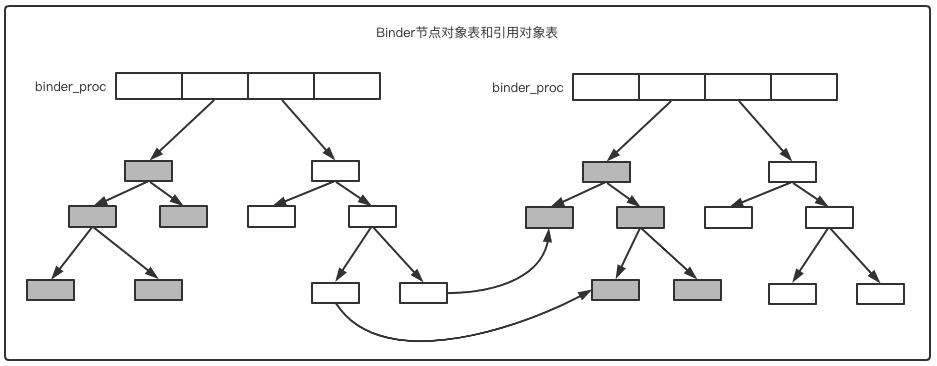
-
Binder驱动中,代表每个进程的结构binde_proc中有两个字段:nodes和refs_by_node -
这两个字段各指向两颗红黑树的头
-
nodes:指向的是Binder节点对象表,储存本进程中Binder实体对象相关的数据 -
refs_by_node:指向的是Binder引用对象表,存储本进程的Binder引用对象的数据以及对应的实体对象的节点指针
来个抽象点的图:
Binder驱动中处理对象转换的代码位于函数binder_transaction中
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct flat_binder_object *fp;
fp = to_flat_binder_object(hdr);
ret = binder_translate_binder(fp, t, thread);
} break;
static int binder_translate_binder(struct flat_binder_object *fp,
struct binder_transaction *t,
struct binder_thread *thread)
{
struct binder_node *node;
struct binder_proc *proc = thread->proc;
struct binder_proc *target_proc = t->to_proc;
struct binder_ref_data rdata;
int ret = 0;
//根据binder值查找Binder对象表中的节点
node = binder_get_node(proc, fp->binder);
if (!node) { //没有则新建一个节点
node = binder_new_node(proc, fp);
if (!node)
return -ENOMEM;
}
//…
if (security_binder_transfer_binder(proc->tsk, target_proc->tsk)) {
ret = -EPERM;
goto done;
}
// 在接收端进程中寻找节点的引用,找不到会创建一个新的引用
ret = binder_inc_ref_for_node(target_proc, node,
fp->hdr.type == BINDER_TYPE_BINDER,
&thread->todo, &rdata);
if (ret)
goto done;
// 将传递的binder数据结构的type的值改为 BINDER_TYPE_HANDLE
if (fp->hdr.type == BINDER_TYPE_BINDER)
fp->hdr.type = BINDER_TYPE_HANDLE;
else
fp->hdr.type = BINDER_TYPE_WEAK_HANDLE;
fp->binder = 0;
// rdata.desc存放的是节点引用表中的序号,赋值给handle
fp->handle = rdata.desc;
fp->cookie = 0;
//…
}
上面的流程是
-
通过
binder_get_node函数在发送进程的Binder对象节点表中查找节点 -
查找是通过比较数据中的
binder字段和节点中对应的字段进行的 -
binder字段中存放的是Binder对象的弱引用指针 -
如果没找到
-
新建节点
-
把
binder字段、cookie字段的值保存到新节点 -
通过
binder_inc_ref_for_node函数在目标进程查找Binder节点的引用。 -
没找到会新建一个
-
引用指的是节点引用表中的refs_by_node节点,包含指向Binder节点的指针 -
把数据的
type字段的值改为BINDER_TYPE_HANDLE或BINDER_TYPE_WEAK_HANDLE -
把
handle字段的值设为在节点引用表的序号,这也是Binder引用对象中handle值的来历
下面再看看如何处理类型BINDER_TYPE_HANDLE或BINDER_TYPE_WEAK_HANDLE的
case BINDER_TYPE_HANDLE:
case BINDER_TYPE_WEAK_HANDLE: {
struct flat_binder_object *fp;
fp = to_flat_binder_object(hdr);
ret = binder_translate_handle(fp, t, thread);
} break;
static int binder_translate_handle(struct flat_binder_object *fp,
struct binder_transaction *t,
struct binder_thread *thread)
{
//…
// 通过handle值查找节点引用
node = binder_get_node_from_ref(proc, fp->handle,
fp->hdr.type == BINDER_TYPE_HANDLE, &src_rdata);
if (!node) {
//…
return -EINVAL;
}
//…
if (node->proc == target_proc) {
// 如果目标进程就是Binder对象的进程,开始转换
if (fp->hdr.type == BINDER_TYPE_HANDLE)
fp->hdr.type = BINDER_TYPE_BINDER;
else
fp->hdr.type = BINDER_TYPE_WEAK_BINDER;
fp->binder = node->ptr;
fp->cookie = node->cookie;
if (node->proc)
binder_inner_proc_lock(node->proc);
binder_inc_node_nilocked(node,
fp->hdr.type == BINDER_TYPE_BINDER,
0, NULL);
//…
} else {
//…
// 如果不是,则在目标进程新建一个Binder节点的引用
ret = binder_inc_ref_for_node(target_proc, node,
fp->hdr.type == BINDER_TYPE_HANDLE,
NULL, &dest_rdata);
//…
fp->handle = dest_rdata.desc;
fp->cookie = 0;
trace_binder_transaction_ref_to_ref(t, node, &src_rdata,
//…
}
}
这部分代码的流程是:
-
通过传输数据的
handle字段在发送进程的节点引用表中查找 -
正常情况下是可以找到,不能就错误返回
-
如果目标进程就是Binder对象所在的进程
-
开始进行转换,把数据的
type字段转为BINDER_TYPE_BINDER或BINDER_TYPE_WEAK_BINDERBINDER_WORK_TRANSACTION -
把
binder和cookie字段设置为节点中保存的值 -
如果目标进程不是Binder对象所在的进程
-
在目标对象中建立一个节点对象的引用
到这里呢,Binder原理部分就差不多了,已经了解了包括:
-
客户端
调用、接收消息的过程 -
服务端
监听、回复消息的过 -
驱动
传输数据、调度线程的操作
现在,我们再来看最后的一小部分:ServiceManager的作用
=================================================================================
关于ServiceManager,先简单描述:
-
ServiceManager是Binder架构中用来解析Binder名称的模块 -
ServiceManager本身就是一个Binder服务 -
ServiceManager并没有使用libbinder来构建Binder服务 -
2020-09-04 同步了下项目代码,发现也替换成
libbinder那一套了。。。。。 -
不确定是不是更换仓储了
-
要是这样就没意思了,简易版本对于加深
binder理解还是很有帮助的 -
我们暂且按照老的版本来看下吧
-
ServiceManager自己实现了一个简单的binder框架来直接和驱动通信。。。
ServiceManager源码路径在:frameworks/native/cmds/servicemanager,主要包含两个文件:
-
binder.c:用来实现简单的Binder通信功能 -
简单版本的
binder协议实现 -
直接的
ioctl操作与binder驱动通信 -
不是本节的重点,感兴趣可以参照源码来学习啦
-
service_manager.c:用来实现ServiceManager的业务逻辑 -
重点是了解
ServiceManager如何响应Binder服务的注册和查询的 -
这么重要的服务要在什么时间启动呢?
-
这部分是在
system/core/rootdir/init.rc中配置
on post-fs
…
start essential services
start logd
start servicemanager
start hwservicemanager
start vndservicemanager
-
hwservicemanager用来支持HIDL -
vndservicemanager第三方厂商使用,应该是从Treble架构中出现的
从ServiceManager的main函数开始:
int main(int argc, char** argv)
{
struct binder_state *bs;
union selinux_callback cb;
char *driver;
if (argc > 1) {
driver = argv[1];
} else {
driver = “/dev/binder”;
}
bs = binder_open(driver, 128*1024);
if (!bs) {
//…
// 省略一些宏判断
return -1;
}
if (binder_become_context_manager(bs)) {
ALOGE(“cannot become context manager (%s)\n”, strerror(errno));
return -1;
}
// 设置selinux callback
cb.func_audit = audit_callback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
cb.func_log = selinux_log_callback;
selinux_set_callback(SELINUX_CB_LOG, cb);
//…
// 省略一些宏判断,都是为了获取sehandle(检查SELinux权限)
sehandle = selinux_android_service_context_handle();
selinux_status_open(true);
if (sehandle == NULL) {
ALOGE(“SELinux: Failed to acquire sehandle. Aborting.\n”);
abort();
}
if (getcon(&service_manager_context) != 0) {
ALOGE(“SELinux: Failed to acquire service_manager context. Aborting.\n”);
abort();
}
binder_loop(bs, svcmgr_handler);
return 0;
}
main函数的流程如下:
-
首先调用
binder_open来打开binder设备和初始化系统 -
同时创建一块
128x1024大小的内存空间 -
接着调用
binder_become_context_manager把本进程设置为Binder框架的管理进程 -
binder_become_context_manager函数代码如下:
int binder_become_context_manager(struct binder_state *bs)
{
return ioctl(bs->fd, BINDER_SET_CONTEXT_MGR, 0);
}
-
函数灰常简单,直接通过
ioctl把控制命令BINDER_SET_CONTEXT_MGR发到了驱动 -
最后执行
binder_loop(bs, svcmgr_handler),简单处理后,循环等待消息
我们要说一说binder_loop(bs, svcmgr_handler),小弟C语言不熟,感觉这个操作很SAO:
binder_loop的函数定义是:
void binder_loop(struct binder_state *bs, binder_handler func)
- 第二个参数传入的是一个
binder_handler类型
- 再来看下
binder_handler类型的定义:
typedef int (*binder_handler)(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply);
-
这是定义了一个
函数指针类型 -
返回值是
int
- 再来看下
binder_loop(bs, svcmgr_handler)中的svcmgr_handler函数的声明
int svcmgr_handler(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply)
{
//…
// 省略一些switch语句,稍后详解
return 0;
}
-
传入的指针是
svcmgr_handler函数指针 -
应该会自动转型为
binder_handler指针类型 -
毕竟函数参数、返回值都是一样的
-
这部分是我觉得最神奇的地方。。。。。
-
特意写了个C代码试了下,
-
如果定义的函数的
参数、返回值与typedef定义的函数指针不一致的话,强转编译会失败 -
不过这种操作感觉还是很不正经。。(还是Java更严谨一些)
- 参数理解的差不多了,我们仔细看下
binder_loop的实现,这两个参数传进去干了啥。
PS:简化版就是更容易理解些。。。。。。
void binder_loop(struct binder_state *bs, binder_handler func)
{
int res;
struct binder_write_read bwr;
uint32_t readbuf[32];
// 老样子,用来记录写入到驱动的一些相关参数
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
// 该属性应该是通知驱动已经准备好接收数据了
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(uint32_t));
for (;😉 {
//无限循环
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t) readbuf;
// 开始读取数据
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
// 异常通信,退出循环
ALOGE(“binder_loop: ioctl failed (%s)\n”, strerror(errno));
break;
}
// 读取到数据后
// 调用 binder_parse 进行数据解析
// 顺便把 binder_handler 函数指针也传递进去
res = binder_parse(bs, 0, (uintptr_t) readbuf, bwr.read_consumed, func);
// 异常情况,退出循环
if (res == 0 || res < 0) {
//…
break;
}
}
}
-
有注释,很很简洁的逻辑
-
最后执行到了
binder_parse函数
- 我们继续跟进
binder_parse函数
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uintptr_t ptr, size_t size, binder_handler func)
{
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
//取指令
uint32_t cmd = *(uint32_t *) ptr;
switch(cmd) {
//…
// 由于binder_handler 在这里会被执行到
// 所以我们先重点看这个,当Binder调用过来时
case BR_TRANSACTION: {
struct binder_transaction_data *txn = (struct binder_transaction_data *) ptr;
// 数据检查
if ((end - ptr) < sizeof(*txn)) {
ALOGE(“parse: txn too small!\n”);
return -1;
}
binder_dump_txn(txn);
// 如果函数指针存在
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
// 一些初始化操作
bio_init(&reply, rdata, sizeof(rdata), 4);
bio_init_from_txn(&msg, txn);
//执行 binder_handler 函数指针指向的函数
res = func(bs, txn, &msg, &reply);
if (txn->flags & TF_ONE_WAY) {
// 这种情况不会返回结果
binder_free_buffer(bs, txn->data.ptr.buffer);
} else {
// 返回结果数据
binder_send_reply(bs, &reply, txn->data.ptr.buffer, res);
}
}
ptr += sizeof(*txn);
break;
}
//…
}
return r;
}
-
还是看注释哈,代码很简洁,注释很详细,哈哈哈
-
到这里,我们可以看出来,真正处理
调用服务的是binder_handler这个函数指针啊 -
也就是说
远程调用的处理逻辑在svcmgr_handler这个函数呀 -
666!
- 我们来看下
svcmgr_handler函数
int svcmgr_handler(struct binder_state *bs,
struct binder_transaction_data *txn,
struct binder_io *msg,
struct binder_io *reply)
{
//…
// 如果请求的目标服务不是ServiceManager,直接返回
if (txn->target.ptr != BINDER_SERVICE_MANAGER)
return -1;
// 如果请求消息内容只是简单的测试通路,不需要继续执行,直接返回 0
if (txn->code == PING_TRANSACTION)
return 0;
// 检查收到的消息 id 串
strict_policy = bio_get_uint32(msg);
s = bio_get_string16(msg, &len);
if (s == NULL) {
return -1;
}
//…
// 检查SELinux 的权限
if (sehandle && selinux_status_updated() > 0) {
struct selabel_handle *tmp_sehandle = selinux_android_service_context_handle();
if (tmp_sehandle) {
selabel_close(sehandle);
sehandle = tmp_sehandle;
}
}
switch(txn->code) {
case SVC_MGR_GET_SERVICE:
case SVC_MGR_CHECK_SERVICE:
// 处理查询或者获取服务的指令
//…
break;
case SVC_MGR_ADD_SERVICE:
// 处理注册服务的的指令
//…
break;
case SVC_MGR_LIST_SERVICES: {
//…
// 处理获取服务列表的指令
}
default:
ALOGE(“unknown code %d\n”, txn->code);
return -1;
}
//发送返回消息
bio_put_uint32(reply, 0);
return 0;
}
ServiceManager的架构非常简单高效,只有一个循环来和binder驱动进行通信
从svcmgr_handler函数中可以看到,ServiceManager提供了三种服务功能:
-
注册
Binder服务 -
查询
Binder服务 -
获取
Binder服务列表
在case SVC_MGR_ADD_SERVICE中实现的注册Binder服务功能,具体的实现函数是do_add_service,代码如下:
int do_add_service(struct binder_state *bs, const uint16_t *s, size_t len, uint32_t handle,
uid_t uid, int allow_isolated, uint32_t dumpsys_priority, pid_t spid) {
struct svcinfo *si;
// 一些基础的信息判断
if (!handle || (len == 0) || (len > 127))
return -1;
// 检查调用进程是否有权限注册服务
if (!svc_can_register(s, len, spid, uid)) {
//…省略log打印
return -1;
}
// 查看要注册的服务是否已经存在
si = find_svc(s, len);
if (si) {
// 如果存在,先把以前的Binder对象的引用计数减一
if (si->handle) {
svcinfo_death(bs, si);
}
// 把原先节点中的handle替换成新的handle
si->handle = handle;
} else {
// 服务不存在,则生成新的列表项,初始化后加入列表
si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
if (!si) {
// 内存申请失败,直接退出
return -1;
}
// 一些初始化操作
si->handle = handle;
si->len = len;
memcpy(si->name, s, (len + 1) * sizeof(uint16_t));
si->name[len] = ‘\0’;
si->death.func = (void*) svcinfo_death;
si->death.ptr = si;
si->allow_isolated = allow_isolated;
si->dumpsys_priority = dumpsys_priority;
si->next = svclist;
svclist = si;
}
// 增加Binder服务的引用计数
binder_acquire(bs, handle);
// 注册该Binder服务的死亡通知
binder_link_to_death(bs, handle, &si->death);
return 0;
}
do_add_service函数的流程是:
-
首先检查调用的进程是否有注册服务的权限
-
这部分是通过SELinux来控制的,后面会学习到
-
接着检查需要注册的服务是否已经存在
-
存在,把原来Binder服务在驱动的引用计数减一
-
不存在
-
新创建一个scvinfo结构
-
填充需要待注册服务的相关信息到结构中
-
把结构加入到服务列表svclist
-
通知内核把Binder服务的引用计数加一
-
注册该服务的死亡通知
有木有发现对于服务已经存在的情况:
-
进行了先减一再加一的操作
-
是不是可以不用操作计数也可以呢?
可以思考下
在case SVC_MGR_CHECK_SERVICE中处理查询服务的功能,具体的实现接口是do_find_service函数,代码如下:
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数初中级Android工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则近万的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Android移动开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Android开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且会持续更新!
如果你觉得这些内容对你有帮助,可以扫码获取!!(备注:Android)

实战系列
话不多说,Android实战系列集合都已经系统分类好,由于文章篇幅问题没法过多展示


《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!
e = handle;
} else {
// 服务不存在,则生成新的列表项,初始化后加入列表
si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
if (!si) {
// 内存申请失败,直接退出
return -1;
}
// 一些初始化操作
si->handle = handle;
si->len = len;
memcpy(si->name, s, (len + 1) * sizeof(uint16_t));
si->name[len] = ‘\0’;
si->death.func = (void*) svcinfo_death;
si->death.ptr = si;
si->allow_isolated = allow_isolated;
si->dumpsys_priority = dumpsys_priority;
si->next = svclist;
svclist = si;
}
// 增加Binder服务的引用计数
binder_acquire(bs, handle);
// 注册该Binder服务的死亡通知
binder_link_to_death(bs, handle, &si->death);
return 0;
}
do_add_service函数的流程是:
-
首先检查调用的进程是否有注册服务的权限
-
这部分是通过SELinux来控制的,后面会学习到
-
接着检查需要注册的服务是否已经存在
-
存在,把原来Binder服务在驱动的引用计数减一
-
不存在
-
新创建一个scvinfo结构
-
填充需要待注册服务的相关信息到结构中
-
把结构加入到服务列表svclist
-
通知内核把Binder服务的引用计数加一
-
注册该服务的死亡通知
有木有发现对于服务已经存在的情况:
-
进行了先减一再加一的操作
-
是不是可以不用操作计数也可以呢?
可以思考下
在case SVC_MGR_CHECK_SERVICE中处理查询服务的功能,具体的实现接口是do_find_service函数,代码如下:
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数初中级Android工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则近万的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Android移动开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。
[外链图片转存中…(img-U3gc4yYh-1713678064079)]
[外链图片转存中…(img-XS8rnrxa-1713678064080)]
[外链图片转存中…(img-O57cDBbA-1713678064081)]
[外链图片转存中…(img-GTsVjKTw-1713678064082)]
[外链图片转存中…(img-hxVJw9RL-1713678064083)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Android开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且会持续更新!
如果你觉得这些内容对你有帮助,可以扫码获取!!(备注:Android)
实战系列
话不多说,Android实战系列集合都已经系统分类好,由于文章篇幅问题没法过多展示
[外链图片转存中…(img-WUonwriT-1713678064085)]
[外链图片转存中…(img-l8wRHgGY-1713678064086)]
《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!















 1136
1136

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









