







 本文介绍了如何在HarmonyOS上使用最近邻分类器进行图像识别。作者提供了一份全面的HarmonyOS学习资料,涵盖从基础到进阶的内容,并分享了实现图像识别的关键代码,包括RGB图转灰度图以及训练和识别过程。
本文介绍了如何在HarmonyOS上使用最近邻分类器进行图像识别。作者提供了一份全面的HarmonyOS学习资料,涵盖从基础到进阶的内容,并分享了实现图像识别的关键代码,包括RGB图转灰度图以及训练和识别过程。
先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新HarmonyOS鸿蒙全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。




既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上鸿蒙开发知识点,真正体系化!
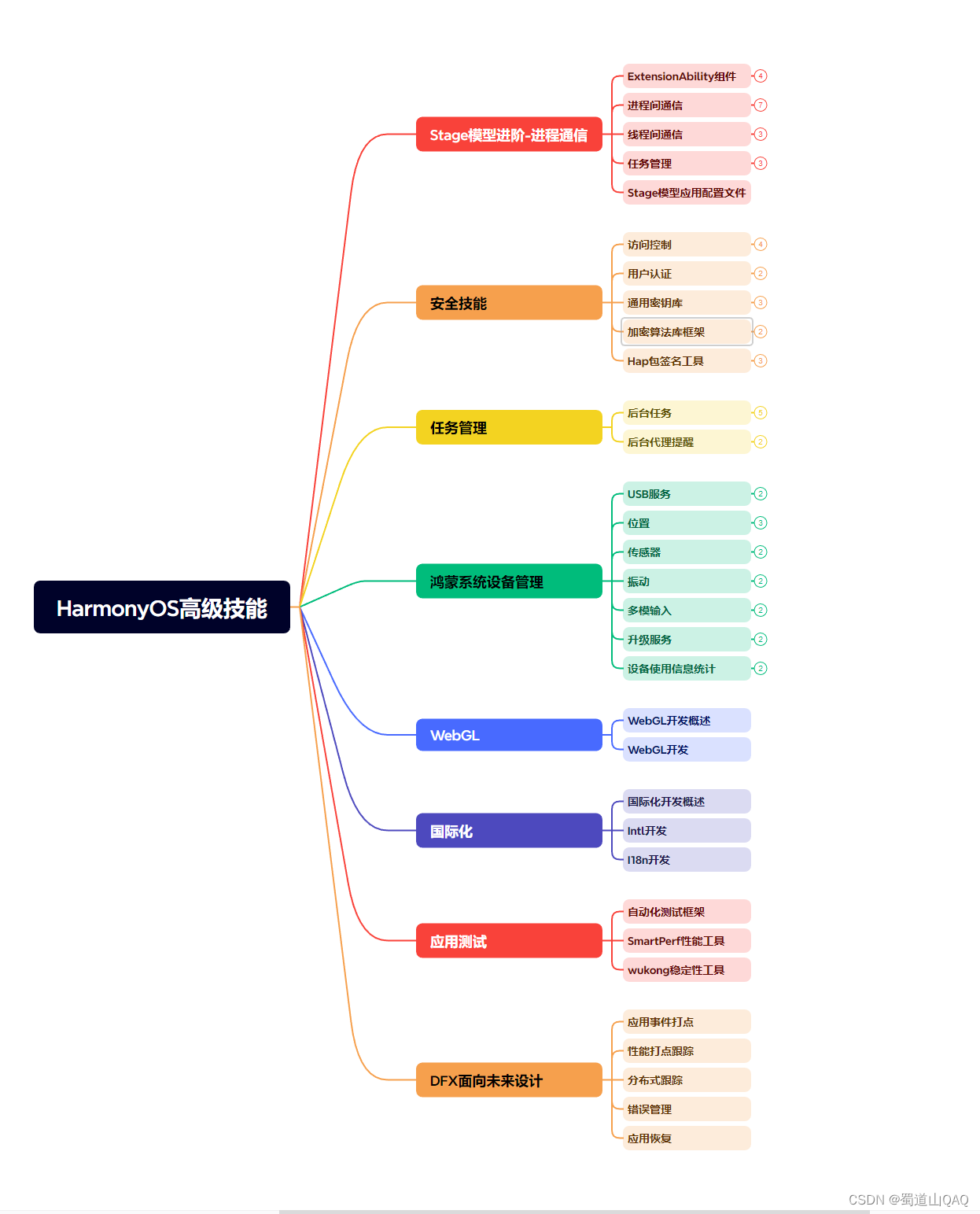
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip204888 (备注鸿蒙)

正文
获取resourceManager
let context = getContext(this)
const resourceMgr = context.resourceManager
获取rawfile文件夹下p1.png的ArrayBuffer
let Data = await resourceMgr.getRawFileContent(‘test.jpg’)
let buffer = Data.buffer
创建ImageSource实例
const imageSource = image.createImageSource(buffer)
创建PixelMap实例
const pixelMap = await imageSource.createPixelMap();
因为我们需要做图像处理,所以还需要创建一个ArrayBuffer实例(buffer对象),并读取PixelMap实例的数据至buffer中。这样以后,buffer就是一个储存了p1.png图像数据的BGRA_8888格式的数组(也可以称之为向量)了。
let dim = 1001004 //维度
let buffer = new ArrayBuffer(dim)
await pixelMap.readPixelsToBuffer(buffer)
.catch(err => {
console.error(err: +${err})
})
由于buffer是BGRA_8888格式的数组,所以buffer中第i,i+1,i+2, i+3(i∈[0,dim/4-1])分别代表某个像素点蓝色分量(B),绿色分量(G),红色分量®和透明度分量(A)。因为本案例的图像识别是在灰度图的基础上进行的,所以我们还需要将BGRA_8888格式的数组转化为灰度值数组。
RGB图转灰度图并不难,只需要将每个像素点的蓝色,绿色和红色分量加权求和,就可以得到每个像素点的灰度值。其中,灰度值 = (红色通道值 * 0.299) + (绿色通道值 * 0.587) + (蓝色通道值 * 0.114)。这里的加权系数是根据人眼对不同颜色敏感度的差异来确定的。
关键代码
XL_Image_NNC.ts
import image from ‘@ohos.multimedia.image’;
import common from ‘@ohos.app.ability.common’;
//所操作图片的尺寸(图片的宽高一致)
const OPERATION_SIZE = 100
/*
- 函数名: Get_NumberType_Array_MinValue_Index
- 描述: 返回输入的number型Array中数值最小的元素所在索引
*/
function Get_NumberType_Array_MinValue_Index(arr:Array):number{
let location:number = 0
for(var i = 0; i < arr.length; ++i){
if(arr[i]<arr[location]){
location = i
}
}
return location
}
//最近邻分类器能力接口
interface I_Nearest_Neighbor_Classifier{
train(context:common.Context,Train_Data:Array)
identify(test_data:string)
}
/*
- 类名: XL_Image_NNC
- 描述: 基于最近邻分类器的图像识别模块
*/
class XL_Image_NNC implements I_Nearest_Neighbor_Classifier{
//日志标签
private TAG:string = '------[XL_Image_NNC] ’
//BGRA_8888图对应向量的规模
private dim_rgb:number = 4*(OPERATION_SIZE**2)
//灰度图对应向量的规模
private dim_gray:number = OPERATION_SIZE**2
//RGB图向量转化为灰度图向量时, 三原色(red green blue)通道值各自占灰度值的权重, 并且满足R_Weight + G_Weight + B_Weight = 1
private R_Weight:number = 0.299
private G_Weight:number = 0.587
private B_Weight:number = 0.114
//已加入的图像向量的集合(BGRA_8888)
private Trained_Data_RGB:Array = []
//已加入的图像向量的集合(灰度图)
private Trained_Data_Gray:Array = []
//存储距离(欧式范数)的数组
private Distance_Array:Array = []
//储存资源管理模块的变量
private resourceMgr = null
/*
- 方法名: train
- 描述: 为分类器填充数据, 使得分类器获取监督模式识别的功能
- 参数: context: UIAbility的上下文对象 Train_Data: 待训练的图片集(图片需要提前储存在rawfile目录下)
*/
public async train(context:common.Context,Train_Data:Array) {
//通过context获取ResourceManager(资源管理模块)
this.resourceMgr = context.resourceManager
//遍历和处理待输入的图片数据
for (var item of Train_Data) {
//通过resourceMgr的getRawFileContent方法(填入图片的文件名字符串),获取rawfile目录下某个图片所资源对应的UintArray
let rawData = await this.resourceMgr.getRawFileContent(item)
//通过先前获取的UintArray创建ImageSource实例
let imageSource = image.createImageSource(rawData.buffer)
//通过ImageSource实例创建像素表
let pixelMap = await imageSource.createPixelMap()
//将像素表读取到新建的ArrayBuffer变量中
let buffer = new ArrayBuffer(this.dim_rgb)
await pixelMap.readPixelsToBuffer(buffer)
.catch(err => {
console.error(this.TAG+err: +${err})
})
//最后将ArrayBuffer携带的RGB型图像向量存入Trained_Data_RGB(向量集合)中
this.Trained_Data_RGB.push(new Uint8Array(buffer))
}
//将获取的RGB型图像向量集合转化为灰度型图像向量集合
for(var element of this.Trained_Data_RGB){
let GrayScaleVector = new Uint8Array(this.dim_gray)
let index:number = 0
//遍历RGB型图像向量的元素
for(var i = 0; i < element.length; i++){
if((i+1)%4 == 0){
//获取像素点的R,G,B通道值, 将他们加权求和得到灰度值
var grayScale = this.R_Weightelement[i-3]+this.G_Weightelement[i-2]+this.B_Weight*element[i-1]
//存储
GrayScaleVector[index++] = grayScale
}
}
//最后将GrayScaleVector携带的灰度型图像向量存入Trained_Data_Gray(向量集合)中
this.Trained_Data_Gray.push(GrayScaleVector)
}
}
/*
- 方法名: identify
- 描述: 基于已获取的数据,完成监督模式识别,返回输入样本的最近邻在Trained_Data_Gray中的索引
- 参数: test_data: 待识别的图片(图片需要储存在rawfile目录下)
*/
public async identify(test_data:string):Promise{
//排除异常情况
if(this.resourceMgr == null){
console.error(this.TAG+‘Please train the image data before identifying’)
return -1
}
//获取rawfile目录下某个图片所对应的UintArray
let rawData = await this.resourceMgr.getRawFileContent(test_data)
//通过先前获取的UintArray创建ImageSource实例
let imageSource = image.createImageSource(rawData.buffer)
//通过ImageSource实例创建像素表
let pixelMap = await imageSource.createPixelMap()
//将像素表读取到新建的buffer变量中
let buffer = new ArrayBuffer(this.dim_rgb)
await pixelMap.readPixelsToBuffer(buffer)
.catch(err => {
console.error(this.TAG+err: +${err})
})
let Sample_RGB = new Uint8Array(buffer)
let Sample_Gray = new Uint8Array(this.dim_gray)
let index:number = 0
//将RGB型的图像向量转化为灰度型的图像向量
for(var i = 0; i < Sample_RGB.length; i++){
if((i+1)%4 == 0){
var grayScale = this.R_WeightSample_RGB[i-3]+this.G_WeightSample_RGB[i-2]+this.B_Weight*Sample_RGB[i-1]
Sample_Gray[index++] = grayScale
}
}
//赋初值
this.Distance_Array = []
//计算待检测图像向量与每项已训练图片向量在高维空间的的距离(距离采用欧式范数), 即(Σ(A[i] - B[i]))^0.5, i ∈ [0, dim_gray) ∩ N
for(var item of this.Trained_Data_Gray){
var distance:number = 0
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注鸿蒙)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
= 0
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注鸿蒙)
[外链图片转存中…(img-jwSWIAK4-1713617318882)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 7031
7031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









