







网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
+ [超参数](#_89)
+ [ResNet 18 网络](#ResNet_18__108)
+ [获取数据](#_134)
+ [训练](#_158)
+ [测试](#_191)
建党 100 年
百年风雨, 金戈铁马.
忆往昔, 岁月峥嵘;
看今朝, 灿烂辉煌.

Resnet
深度残差网络 ResNet (Deep residual network) 和 Alexnet 一样是深度学习的一个里程碑.

TensorFlow 版 Restnet 实现:
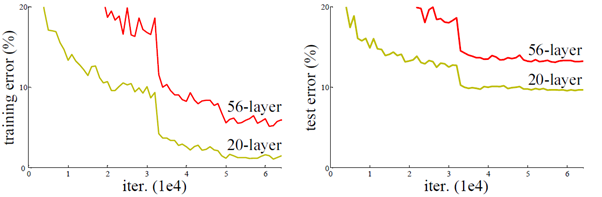
深度网络退化
当网络深度从 0 增加到 20 的时候, 结果会随着网络的深度而变好. 但当网络超过 20 层的时候, 结果会随着网络深度的增加而下降. 网络的层数越深, 梯度之间的相关性会越来越差, 模型也更难优化.
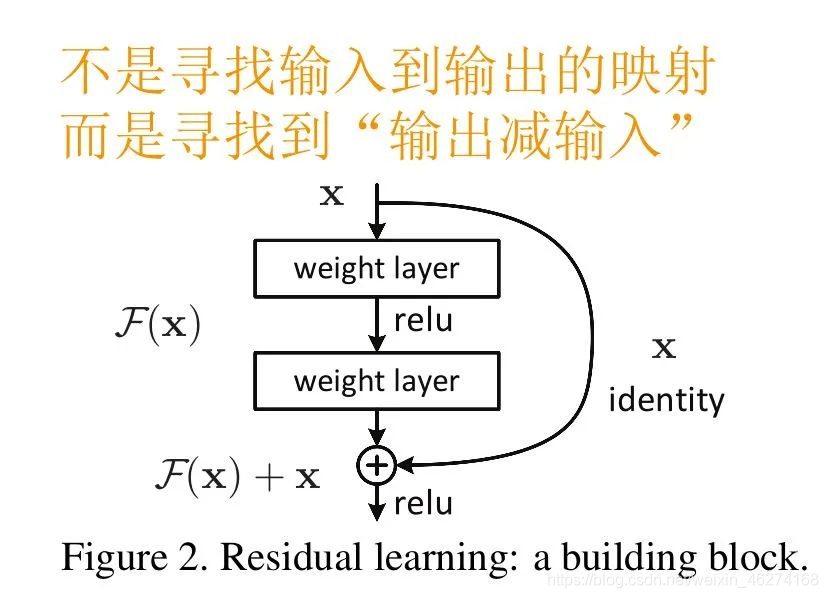
残差网络 (ResNet) 通过增加映射 (Identity) 来解决网络退化问题. H(x) = F(x) + x通过集合残差而不是恒等隐射, 保证了网络不会退化.
代码实现
残差块
class BasicBlock(torch.nn.Module):
"""残差块"""
def __init__(self, inplanes, planes, stride=1):
"""初始化"""
super(BasicBlock, self).__init__()
self.conv1 = torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(3, 3),
stride=(stride, stride), padding=1) # 卷积层1
self.bn1 = torch.nn.BatchNorm2d(planes) # 标准化层1
self.conv2 = torch.nn.Conv2d(in_channels=planes, out_channels=planes, kernel_size=(3, 3), padding=1) # 卷积层2
self.bn2 = torch.nn.BatchNorm2d(planes) # 标准化层2
# 如果步长不为1, 用1*1的卷积实现下采样
if stride != 1:
self.downsample = torch.nn.Sequential(
# 下采样
torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(1, 1), stride=(stride, stride)))
else:
self.downsample = lambda x: x # 返回x
def forward(self, input):
"""前向传播"""
out = self.conv1(input)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
identity = self.downsample(input)
output = torch.add(out, identity)
output = F.relu(output)
return output
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
超参数
# 定义超参数
batch_size = 1024 # 一次训练的样本数目
learning_rate = 0.0001 # 学习率
iteration_num = 20 # 迭代次数
network = ResNet_18
optimizer = torch.optim.Adam(network.parameters(), lr=learning_rate) # 优化器
# GPU 加速
use_cuda = torch.cuda.is_available()
if use_cuda:
network.cuda()
print("是否使用 GPU 加速:", use_cuda)
print(summary(network, (3, 32, 32)))
ResNet 18 网络
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
获取数据
def get_data():
"""获取数据"""
# 获取测试集
train = torchvision.datasets.CIFAR100(root="./data", train=True, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
train_loader = DataLoader(train, batch_size=batch_size) # 分割测试集
# 获取测试集
test = torchvision.datasets.CIFAR100(root="./data", train=False, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
test_loader = DataLoader(test, batch_size=batch_size) # 分割训练
# 返回分割好的训练集和测试集
return train_loader, test_loader
训练
def train(model, epoch, train_loader):
"""训练"""
# 训练模式
model.train()
# 迭代
for step, (x, y) in enumerate(train_loader):
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 梯度清零
optimizer.zero_grad()
output = model(x)
# 计算损失
loss = F.cross_entropy(output, y)
# 反向传播
loss.backward()
# 更新梯度
optimizer.step()
# 打印损失
if step % 10 == 0:
print('Epoch: {}, Step {}, Loss: {}'.format(epoch, step, loss))
测试
def test(model, test_loader):
"""测试"""
# 测试模式
model.eval()
# 存放正确个数
correct = 0
with torch.no_grad():
for x, y in test_loader:
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 获取结果
output = model(x)
# 预测结果
pred = output.argmax(dim=1, keepdim=True)
# 计算准确个数
correct += pred.eq(y.view_as(pred)).sum().item()
# 计算准确率
accuracy = correct / len(test_loader.dataset) * 100
# 输出准确
print("Test Accuracy: {}%".format(accuracy))
完整代码

完整代码:
import torch
import torchvision
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchsummary import summary
class BasicBlock(torch.nn.Module):
"""残差块"""
def __init__(self, inplanes, planes, stride=1):
"""初始化"""
super(BasicBlock, self).__init__()
self.conv1 = torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(3, 3),
stride=(stride, stride), padding=1) # 卷积层1
self.bn1 = torch.nn.BatchNorm2d(planes) # 标准化层1
self.conv2 = torch.nn.Conv2d(in_channels=planes, out_channels=planes, kernel_size=(3, 3), padding=1) # 卷积层2
self.bn2 = torch.nn.BatchNorm2d(planes) # 标准化层2
# 如果步长不为1, 用1*1的卷积实现下采样
if stride != 1:
self.downsample = torch.nn.Sequential(
# 下采样
torch.nn.Conv2d(in_channels=inplanes, out_channels=planes, kernel_size=(1, 1), stride=(stride, stride)))
else:
self.downsample = lambda x: x # 返回x
def forward(self, input):
"""前向传播"""
out = self.conv1(input)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
identity = self.downsample(input)
output = torch.add(out, identity)
output = F.relu(output)
return output
ResNet_18 = torch.nn.Sequential(
# 初始层
torch.nn.Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1)), # 卷积
torch.nn.BatchNorm2d(64),
torch.nn.ReLU(),
torch.nn.MaxPool2d((2, 2)), # 池化
# 8个block(每个为两层)
BasicBlock(64, 64, stride=1),
BasicBlock(64, 64, stride=1),
BasicBlock(64, 128, stride=2),
BasicBlock(128, 128, stride=1),
BasicBlock(128, 256, stride=2),
BasicBlock(256, 256, stride=1),
BasicBlock(256, 512, stride=2),
BasicBlock(512, 512, stride=1),
torch.nn.AvgPool2d(2), # 池化
torch.nn.Flatten(), # 平铺层
# 全连接层
torch.nn.Linear(512, 100) # 100类
)
# 定义超参数
batch_size = 1024 # 一次训练的样本数目
learning_rate = 0.0001 # 学习率
iteration_num = 20 # 迭代次数
network = ResNet_18
optimizer = torch.optim.Adam(network.parameters(), lr=learning_rate) # 优化器
# GPU 加速
use_cuda = torch.cuda.is_available()
if use_cuda:
network.cuda()
print("是否使用 GPU 加速:", use_cuda)
print(summary(network, (3, 32, 32)))
def get_data():
"""获取数据"""
# 获取测试集
train = torchvision.datasets.CIFAR100(root="./data", train=True, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
train_loader = DataLoader(train, batch_size=batch_size) # 分割测试集
# 获取测试集
test = torchvision.datasets.CIFAR100(root="./data", train=False, download=True,
transform=torchvision.transforms.Compose([
torchvision.transforms.ToTensor(), # 转换成张量
torchvision.transforms.Normalize((0.1307,), (0.3081,)) # 标准化
]))
test_loader = DataLoader(test, batch_size=batch_size) # 分割训练
# 返回分割好的训练集和测试集
return train_loader, test_loader
def train(model, epoch, train_loader):
"""训练"""
# 训练模式
model.train()
# 迭代
for step, (x, y) in enumerate(train_loader):
# 加速
if use_cuda:
model = model.cuda()
x, y = x.cuda(), y.cuda()
# 梯度清零
optimizer.zero_grad()
output = model(x)
# 计算损失
loss = F.cross_entropy(output, y)
# 反向传播
loss.backward()
# 更新梯度
optimizer.step()
# 打印损失
if step % 10 == 0:
print('Epoch: {}, Step {}, Loss: {}'.format(epoch, step, loss))
def test(model, test_loader):
"""测试"""
# 测试模式
model.eval()
# 存放正确个数
correct = 0
with torch.no_grad():
for x, y in test_loader:
# 加速


**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
# 测试模式
model.eval()
# 存放正确个数
correct = 0
with torch.no_grad():
for x, y in test_loader:
# 加速
[外链图片转存中...(img-ziuFrkxi-1715613175711)]
[外链图片转存中...(img-zVqJb7AR-1715613175712)]
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









