



目录
图示项目:
一、硬件电路原理详解
(一)STM32F103C8 核心板架构
STM32F103C8T6 作为 ARM Cortex-M3 内核的 32 位微控制器,具有 72MHz 主频、64KB Flash 和 20KB SRAM。其 GPIO 端口分为 A~G 共 7 组,每组 16 个引脚,本次跑马灯项目主要使用 GPIOA 端口的 PA0~PA2 引脚。
(二)LED 驱动电路设计
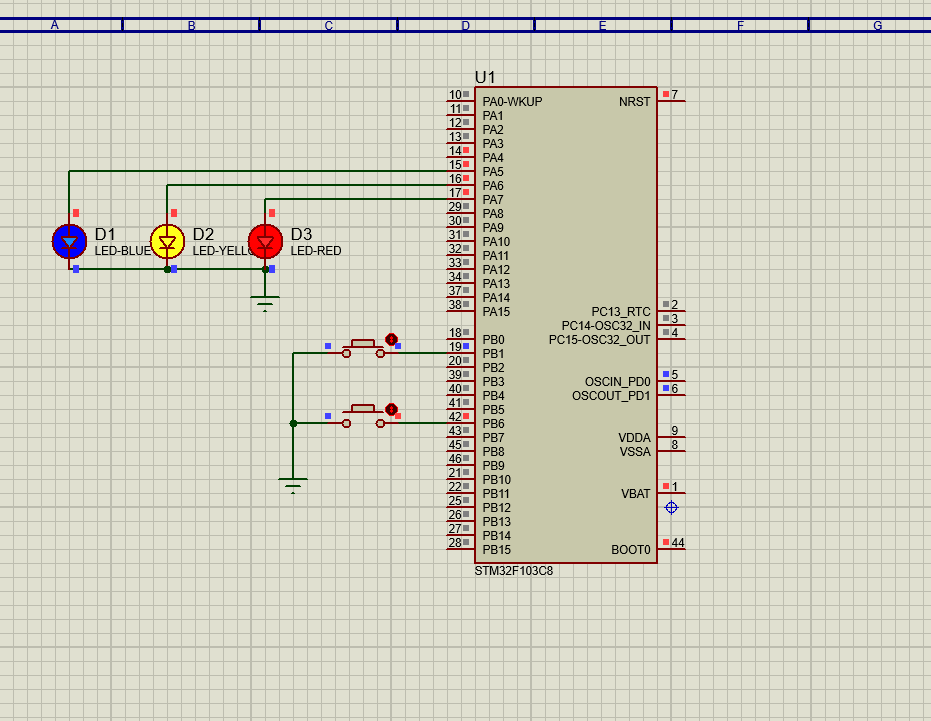
在仿真电路中,三个 LED 分别连接到 PA0(蓝色 LED)、PA1(黄色 LED)和 PA2(红色 LED)。实际电路设计中需注意:
- 限流电阻计算:假设 LED 正向压降为 2V,工作电流为 10mA,STM32 引脚输出电压为 3.3V,则限流电阻值 R=(3.3V-2V)/10mA=130Ω,实际可取 150Ω 标准值。
- 驱动方式选择:采用推挽输出模式可提供更强的驱动能力,而开漏输出需外接上拉电阻才能输出高电平。
(三)Proteus 仿真电路搭建
在 Proteus 中搭建电路时需注意:
- 芯片型号选择:确保选用 STM32F103R6(LQFP48 封装)
- 电源电路配置:添加 8MHz 外部晶振和复位电路
- 仿真参数设置:调整时钟频率为 72MHz 以匹配实际开发板
二、开发环境深度配置
(一)Keil MDK 安装与配置
- 版本选择:推荐使用 Keil MDK 5.30 及以上版本
- Pack 安装:通过 Pack Installer 安装 STM32F1 系列支持包
- 工程模板创建:使用 CubeMX 生成基础工程模板,配置 SYS、RCC 和 GPIO 参数
(二)STM32 标准外设库解析
标准外设库提供了丰富的 API 函数,主要包括:
- GPIO 库函数:GPIO_Init()、GPIO_SetBits()、GPIO_ResetBits()
- RCC 库函数:RCC_APB2PeriphClockCmd()
- NVIC 库函数:NVIC_Init ()(用于中断配置)
(三)Proteus 与 Keil 联调配置
- 在 Keil 中生成 HEX 文件:勾选 "Create HEX File" 选项
- 在 Proteus 中加载 HEX 文件:双击 STM32 芯片,设置 Program File 路径
- 调试设置:配置 Debug 选项为 "Use Proteus VSM Simulator"
三、代码实现与高级优化
(一)标准外设库方式实现
#include "stm32f10x.h"
void Delay(__IO uint32_t nCount);
int main(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置PA0~PA2为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
// 蓝色LED亮
GPIO_SetBits(GPIOA, GPIO_Pin_0);
Delay(0x2FFFFF);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
// 黄色LED亮
GPIO_SetBits(GPIOA, GPIO_Pin_1);
Delay(0x2FFFFF);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
// 红色LED亮
GPIO_SetBits(GPIOA, GPIO_Pin_2);
Delay(0x2FFFFF);
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
}
// 简单延时函数
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}(二)寄存器方式实现(更底层优化)
#include "stm32f10x.h"
#define LED_BLUE_PIN (1 << 0)
#define LED_YELLOW_PIN (1 << 1)
#define LED_RED_PIN (1 << 2)
void Delay(__IO uint32_t nCount);
int main(void)
{
// 使能GPIOA时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
// 配置PA0~PA2为推挽输出,50MHz
GPIOA->CRL &= ~(0xFFF << 0);
GPIOA->CRL |= (0x333 << 0);
while (1)
{
// 蓝色LED亮
GPIOA->BSRR = LED_BLUE_PIN;
Delay(0x2FFFFF);
GPIOA->BRR = LED_BLUE_PIN;
// 黄色LED亮
GPIOA->BSRR = LED_YELLOW_PIN;
Delay(0x2FFFFF);
GPIOA->BRR = LED_YELLOW_PIN;
// 红色LED亮
GPIOA->BSRR = LED_RED_PIN;
Delay(0x2FFFFF);
GPIOA->BRR = LED_RED_PIN;
}
}(三)高级优化方案
- 定时器精确延时:
void TIM3_Configuration(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 使能TIM3时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); // TIM3配置 - 1ms基准时间 TIM_TimeBaseStructure.TIM_Period = 999; TIM_TimeBaseStructure.TIM_Prescaler = 71; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_Cmd(TIM3, ENABLE); } void Delay_ms(uint32_t ms) { uint32_t start = TIM3->CNT; uint32_t timeout = ms; while ((TIM3->CNT - start) < timeout); }2.状态机实现跑马灯模式切换
typedef enum { MODE_LEFT_TO_RIGHT, MODE_RIGHT_TO_LEFT, MODE_BLINK_ALL, MODE_BREATHING } MarqueeMode; MarqueeMode currentMode = MODE_LEFT_TO_RIGHT; void Marquee_Process(void) { static uint32_t lastTime = 0; static uint8_t step = 0; if (GetSysTime() - lastTime > 500) { lastTime = GetSysTime(); switch (currentMode) { case MODE_LEFT_TO_RIGHT: // 从左到右流水灯逻辑 break; case MODE_BREATHING: // 呼吸灯效果实现 break; // 其他模式实现 } step = (step + 1) % 3; } }四、仿真调试与问题排查
(一)常见问题及解决方案
| 问题现象 | 可能原因 |
| |
| LED 不亮 |
| 检查 GPIO 模式和时钟使能 | |
| 仿真卡顿 | 系统时钟设置不正确 | 确认 Proteus 中晶振频率为 8MHz | |
| 程序无法下载 | 仿真器配置错误 | 检查 Debug 设置和 HEX 文件路径 |
二)调试技巧
- 使用 printf 调试:通过 USART1 实现串口打印,输出调试信息
- 断点调试:在关键代码处设置断点,观察变量值变化
- 逻辑分析仪:使用 Proteus 的虚拟逻辑分析仪观察 GPIO 引脚电平变化
五、扩展应用与项目实战
(一)多模式跑马灯实现
- 双向流水灯
- 呼吸灯效果(PWM 调光)
- 随机闪烁模式
(二)实战项目案例
- 基于光敏传感器的智能跑马灯:根据环境光线强度自动调节亮度
- 音乐节奏灯:通过麦克风采集声音信号,实现灯光随音乐节奏变化
- 交通信号灯模拟:模拟真实交通灯的工作逻辑
六、总结与展望
通过本次项目,我们深入理解了 STM32 的 GPIO 操作、外设库使用和 Proteus 仿真方法。跑马灯作为嵌入式开发的入门项目,为后续学习打下了坚实基础。未来可以进一步探索:
- STM32 的高级外设应用(ADC、PWM、SPI 等)
- 基于 FreeRTOS 的多任务系统开发
- 物联网应用开发(连接 WiFi/Bluetooth 模块)
希望本文能帮助你顺利开启 STM32 开发之旅,在实践中不断积累经验,开发出更具创新性的项目!

















 5640
5640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









