







道路瑕疵数据集
标注了(裂纹(Crack)、检查井(Manhole)、网(Net)、裂纹块(Patch-Crack)、网块(Patch-Net)、坑洼块(Patch-Pothole)、坑洼(Pothole)和其他(other))这八个类别,数据集总计6000张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。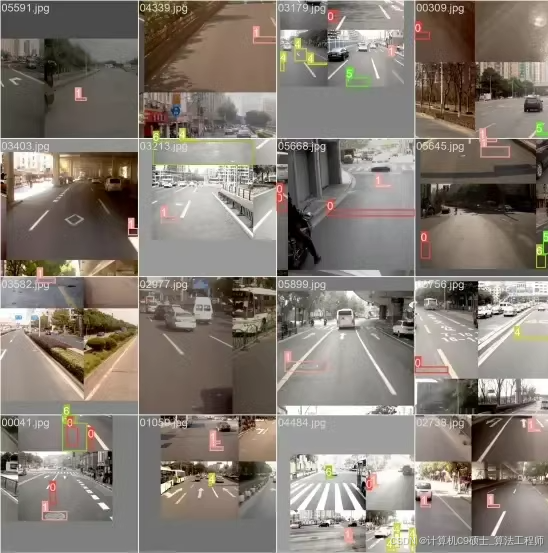
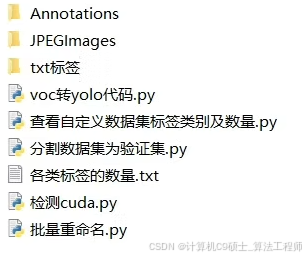
附五个常用的脚本,标签有xml和txt格式,可以用于yolo训练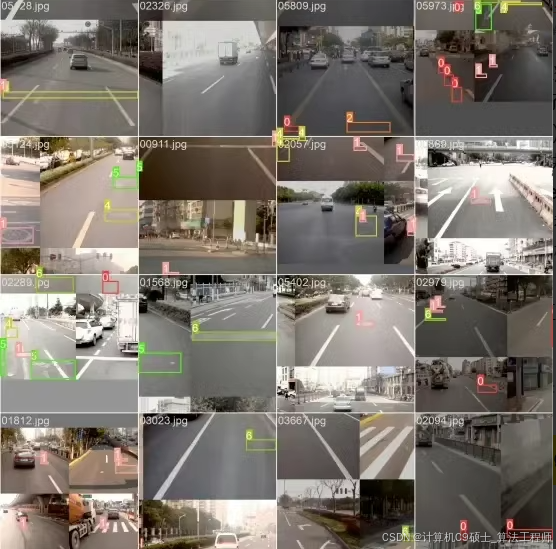
以下文章代码仅供参考:
使用YOLOv8来训练道路瑕疵数据集。以下是详细的步骤:
-
环境准备:
- 安装必要的库。
- 下载并组织数据集。
-
数据预处理:
- 将XML格式的标注转换为YOLOv8所需的TXT格式。
- 确认数据集的划分和标签格式。
-
模型定义与训练:
- 使用YOLOv8进行目标检测。
-
评估与可视化:
- 评估模型性能。
- 可视化结果。
环境准备
首先,我们需要安装必要的库。您可以使用以下命令来设置环境:
pip install ultralytics lxml opencv-python-headless pandas scikit-learn
数据预处理
我们需要将XML格式的标注文件转换为YOLOv8所需的TXT格式。以下是数据转换脚本 convert_xml_to_yolo.py:
[<title="Convert XML Annotations to YOLO TXT Format">]
import os
import xml.etree.ElementTree as ET
from pathlib import Path
# Define paths
base_path = Path('datasets/road_defects')
annotations_dir = base_path / 'Annotations'
images_dir = base_path / 'JPEGImages'
output_labels_dir = base_path / 'labels'
# Create output directory if it doesn't exist
os.makedirs(output_labels_dir, exist_ok=True)
# Class names and their corresponding IDs
class_names = {
'Crack': 0,
'Manhole': 1,
'Net': 2,
'Patch-Crack': 3,
'Patch-Net': 4,
'Patch-Pothole': 5,
'Pothole': 6,
'other': 7
}
def convert_annotation(xml_file):
tree = ET.parse(xml_file)
root = tree.getroot()
image_width = int(root.find('size/width').text)
image_height = int(root.find('size/height').text)
label_lines = []
for obj in root.findall('object'):
class_name = obj.find('name').text
bbox = obj.find('bndbox')
xmin = float(bbox.find('xmin').text)
ymin = float(bbox.find('ymin').text)
xmax = float(bbox.find('xmax').text)
ymax = float(bbox.find('ymax').text)
# Convert bounding box to YOLO format (center_x, center_y, width, height)
center_x = (xmin + xmax) / 2.0 / image_width
center_y = (ymin + ymax) / 2.0 / image_height
width = (xmax - xmin) / image_width
height = (ymax - ymin) / image_height
class_id = class_names[class_name]
label_line = f"{class_id} {center_x} {center_y} {width} {height}\n"
label_lines.append(label_line)
return label_lines
for annotation_file in annotations_dir.glob('*.xml'):
image_name = annotation_file.stem + '.jpg' # Assuming images are in JPEG format
label_file = output_labels_dir / (annotation_file.stem + '.txt')
label_lines = convert_annotation(annotation_file)
with open(label_file, 'w') as f:
f.writelines(label_lines)
print("Conversion completed.")
创建YAML配置文件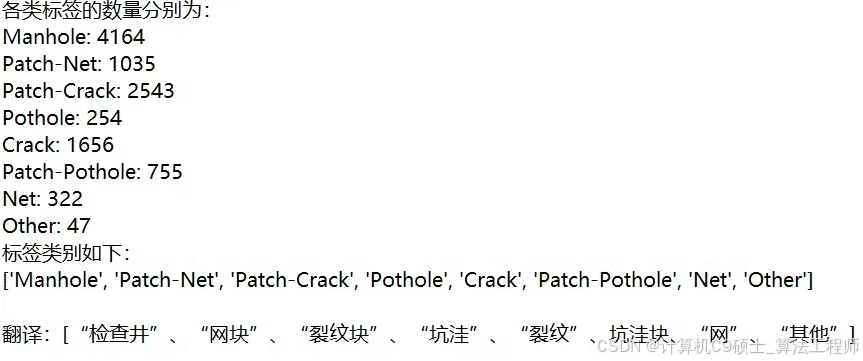
确保您有一个正确的YAML配置文件 road_defects.yaml 来描述数据集。以下是示例配置文件:
[<title="YOLOv8 Configuration File for Road Defect Detection">]
train: ../datasets/road_defects/train/images
val: ../datasets/road_defects/val/images
nc: 8
names: ['Crack', 'Manhole', 'Net', 'Patch-Crack', 'Patch-Net', 'Patch-Pothole', 'Pothole', 'other']
将上述内容保存为 datasets/road_defects/road_defects.yaml。
划分数据集
假设您的数据集已经分为训练集、验证集和测试集,并且每个集合都有对应的图像和标签文件。如果还没有划分数据集,可以使用以下脚本来随机划分数据集:
[<title="Split Dataset into Train, Val, Test Sets">]
import os
import random
from sklearn.model_selection import train_test_split
import pandas as pd
from pathlib import Path
# Define paths
base_path = Path('datasets/road_defects')
images_dir = base_path / 'JPEGImages'
annotations_dir = base_path / 'labels'
train_images_dir = base_path / 'train/images'
train_labels_dir = base_path / 'train/labels'
val_images_dir = base_path / 'val/images'
val_labels_dir = base_path / 'val/labels'
test_images_dir = base_path / 'test/images'
test_labels_dir = base_path / 'test/labels'
# Create directories if they don't exist
os.makedirs(train_images_dir, exist_ok=True)
os.makedirs(train_labels_dir, exist_ok=True)
os.makedirs(val_images_dir, exist_ok=True)
os.makedirs(val_labels_dir, exist_ok=True)
os.makedirs(test_images_dir, exist_ok=True)
os.makedirs(test_labels_dir, exist_ok=True)
# List all image files
image_files = list(images_dir.glob('*.jpg')) # Adjust extension if necessary
# Shuffle the image files
random.shuffle(image_files)
# Split ratios
train_ratio = 0.7
val_ratio = 0.15
test_ratio = 0.15
# Calculate split indices
num_images = len(image_files)
train_split = int(num_images * train_ratio)
val_split = int(num_images * (train_ratio + val_ratio))
# Split images and labels
train_images = image_files[:train_split]
val_images = image_files[train_split:val_split]
test_images = image_files[val_split:]
def copy_files(source_images, dest_images_dir, dest_labels_dir):
for img_file in source_images:
label_file = annotations_dir / (img_file.stem + '.txt')
if label_file.exists():
os.symlink(img_file, dest_images_dir / img_file.name)
os.symlink(label_file, dest_labels_dir / label_file.name)
copy_files(train_images, train_images_dir, train_labels_dir)
copy_files(val_images, val_images_dir, val_labels_dir)
copy_files(test_images, test_images_dir, test_labels_dir)
print("Dataset splitting completed.")
模型定义与训练
我们将使用YOLOv8进行目标检测。以下是训练脚本 train_detection.py:
[<title="Training Script for Road Defect Detection using YOLOv8">]
from ultralytics import YOLO
# Load a model
model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
# Train the model
results = model.train(
data='../datasets/road_defects/road_defects.yaml',
epochs=50,
imgsz=768,
batch=16,
project='../runs/train',
name='road_defect_detection'
)
# Evaluate the model
metrics = model.val()
results = model.export(format='onnx') # export the trained model to ONNX format
评估与可视化
使用YOLOv8自带的评估脚本来评估目标检测模型。
[<title="Evaluation Script for Road Defect Detection using YOLOv8">]
from ultralytics import YOLO
# Load the best model
best_model = YOLO('../runs/train/road_defect_detection/weights/best.pt')
# Evaluate the model on the validation dataset
metrics = best_model.val(data='../datasets/road_defects/road_defects.yaml', conf=0.5, iou=0.45)
print(metrics)
用户界面
我们将使用 PyQt5 创建一个简单的 GUI 来加载和运行模型进行实时预测。以下是用户界面脚本 ui.py:
[<title="PyQt5 Main Window for Road Defect Detection">]
import sys
import cv2
import numpy as np
from PyQt5.QtWidgets import QApplication, QMainWindow, QLabel, QPushButton, QVBoxLayout, QWidget, QFileDialog
from PyQt5.QtGui import QImage, QPixmap
from PyQt5.QtCore import Qt, QTimer
from ultralytics import YOLO
# Load model
detection_model = YOLO('../runs/train/road_defect_detection/weights/best.pt')
class MainWindow(QMainWindow):
def __init__(self):
super().__init__()
self.setWindowTitle("道路瑕疵检测系统")
self.setGeometry(100, 100, 800, 600)
self.initUI()
def initUI(self):
self.central_widget = QWidget()
self.setCentralWidget(self.central_widget)
self.layout = QVBoxLayout()
self.image_label = QLabel(self)
self.image_label.setAlignment(Qt.AlignCenter)
self.layout.addWidget(self.image_label)
self.load_image_button = QPushButton("加载图像", self)
self.load_image_button.clicked.connect(self.load_image)
self.layout.addWidget(self.load_image_button)
self.start_prediction_button = QPushButton("开始预测", self)
self.start_prediction_button.clicked.connect(self.start_prediction)
self.layout.addWidget(self.start_prediction_button)
self.stop_prediction_button = QPushButton("停止预测", self)
self.stop_prediction_button.clicked.connect(self.stop_prediction)
self.layout.addWidget(self.stop_prediction_button)
self.central_widget.setLayout(self.layout)
self.image_path = None
self.timer = QTimer()
self.timer.timeout.connect(self.update_frame)
def load_image(self):
options = QFileDialog.Options()
file_name, _ = QFileDialog.getOpenFileName(self, "选择图像文件", "", "Images (*.png *.jpg *.jpeg);;All Files (*)", options=options)
if file_name:
self.image_path = file_name
self.display_image(file_name)
def display_image(self, path):
pixmap = QPixmap(path)
scaled_pixmap = pixmap.scaled(self.image_label.width(), self.image_label.height(), Qt.KeepAspectRatio)
self.image_label.setPixmap(scaled_pixmap)
def start_prediction(self):
if self.image_path is not None and not self.timer.isActive():
self.timer.start(30) # Update frame every 30 ms
def stop_prediction(self):
if self.timer.isActive():
self.timer.stop()
self.image_label.clear()
def update_frame(self):
original_image = cv2.imread(self.image_path)
image_rgb = cv2.cvtColor(original_image, cv2.COLOR_BGR2RGB)
# Detection
results = detection_model.predict(image_rgb, size=768, conf=0.5, iou=0.45)[0]
for box in results.boxes.cpu().numpy():
r = box.xyxy[0].astype(int)
cls = int(box.cls[0])
conf = box.conf[0]
# Map class ID to name
class_names = ['裂纹', '检查井', '网', '裂纹块', '网块', '坑洼块', '坑洼', '其他']
class_name = class_names[cls]
# Draw bounding box
cv2.rectangle(image_rgb, (r[0], r[1]), (r[2], r[3]), (0, 255, 0), 2)
# Put text
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(image_rgb, f'{class_name} ({conf:.2f})', (r[0], r[1] - 10), font, 0.9, (0, 255, 0), 2)
h, w, ch = image_rgb.shape
bytes_per_line = ch * w
qt_image = QImage(image_rgb.data, w, h, bytes_per_line, QImage.Format_RGB888)
pixmap = QPixmap.fromImage(qt_image)
scaled_pixmap = pixmap.scaled(self.image_label.width(), self.image_label.height(), Qt.KeepAspectRatio)
self.image_label.setPixmap(scaled_pixmap)
if __name__ == "__main__":
app = QApplication(sys.argv)
window = MainWindow()
window.show()
sys.exit(app.exec_())
请确保将路径替换为您实际的路径。
使用说明
-
配置路径:
- 确保
datasets/road_defects目录结构正确,并且包含train,val, 和test子目录。 - 确保
runs/train/road_defect_detection/weights/best.pt是训练好的 YOLOv8 模型权重路径。
- 确保
-
运行脚本:
- 在终端中运行
convert_xml_to_yolo.py脚本来将XML格式的标注文件转换为YOLOv8所需的TXT格式。 - 如果尚未划分数据集,在终端中运行
split_dataset.py脚本来划分数据集。 - 在终端中运行
check_dataset.py脚本来检查数据集的有效性。 - 在终端中运行
train_detection.py脚本来训练目标检测模型。 - 在终端中运行
evaluate_detection.py来评估目标检测模型性能。 - 在终端中运行
ui.py来启动 GUI 应用程序。
- 在终端中运行
-
注意事项:
- 确保所有必要的工具箱已安装,特别是
ultralytics和PyQt5。 - 根据需要调整参数,如
epochs和batch_size。
- 确保所有必要的工具箱已安装,特别是
示例
假设您的数据文件夹结构如下:
datasets/
└── road_defects/
├── train/
│ ├── images/
│ └── labels/
├── val/
│ ├── images/
│ └── labels/
└── test/
├── images/
└── labels/
并且每个数据集中包含相应的图像和标签文件。运行 ui.py 后,您可以点击按钮来加载图像并进行道路瑕疵检测。
总结
,我们可以构建一个全面的基于深度学习的道路瑕疵检测系统,包括数据集准备、环境部署、数据预处理、模型定义、训练、评估、结果分析、可视化以及用户界面开发。以下是所有相关的代码文件:
- 数据转换 (
convert_xml_to_yolo.py) - 数据集划分 (
split_dataset.py) - 数据检查 (
check_dataset.py) - 目标检测训练脚本 (
train_detection.py) - YOLOv8 配置文件 (
road_defects.yaml) - 目标检测评估脚本 (
evaluate_detection.py) - 用户界面 (
ui.py)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









