






基于深度学习的车道线检测系统
以下文字及代码仅供参考。同学们

预实现功能:
1可以检测图片、视频
2基于 UFLD 的车道线算法,Tusimple 数据集
3可训练自己标注的数据集
构建基于深度学习的车道线检测系统,使用UFLD(Ultra Fast Lane Detection)算法和Tusimple数据集,涉及多个步骤:环境配置、数据准备、模型训练、推理以及用户界面设计。
关键代码示例。
1. 环境配置
确保你的开发环境已经安装了必要的库和工具,并且具备NVIDIA独显支持。
安装依赖
# 创建并激活虚拟环境
conda create -n lane_detection python=3.8
conda activate lane_detection
# 安装相关库
pip install numpy opencv-python torch torchvision matplotlib PyQt5
2. 数据集准备
下载并解压Tusimple数据集,或者使用自己标注的数据集。
数据集结构
datasets/
├── train_set/
│ ├── images/
│ └── labels/
└── test_set/
├── images/
└── labels/
3. 模型讲解
UFLD是一种轻量级的车道线检测算法,它通过卷积神经网络直接预测车道线的位置。模型主要由以下几个部分组成:
- 特征提取模块:使用VGG或ResNet等预训练模型提取图像特征。
- 车道线预测模块:通过一系列卷积层和上采样层预测车道线的位置。
- 损失函数:结合二分类交叉熵损失和L1损失进行优化。
4. 环境配置
确保你的环境满足以下要求:
- Python 3.8+
- PyTorch 1.7+ with CUDA support
- NVIDIA GPU with at least 4GB VRAM
5. 模型训练
使用PyTorch实现UFLD模型,并在Tusimple数据集上进行训练。
UFLD模型代码
import torch
import torch.nn as nn
import torchvision.models as models
class UFLD(nn.Module):
def __init__(self, num_classes=2):
super(UFLD, self).__init__()
# 特征提取模块
self.features = models.vgg16(pretrained=True).features
# 车道线预测模块
self.classifier = nn.Sequential(
nn.Conv2d(512, 1024, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(1024, 1024, kernel_size=1),
nn.ReLU(inplace=True),
nn.Conv2d(1024, num_classes, kernel_size=1)
)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x
# 示例:创建模型实例
model = UFLD().cuda()
训练代码
import os
import cv2
import numpy as np
from torch.utils.data import Dataset, DataLoader
import torch.optim as optim
class LaneDataset(Dataset):
def __init__(self, image_dir, label_dir):
self.image_dir = image_dir
self.label_dir = label_dir
self.images = os.listdir(image_dir)
def __len__(self):
return len(self.images)
def __getitem__(self, idx):
img_path = os.path.join(self.image_dir, self.images[idx])
lbl_path = os.path.join(self.label_dir, self.images[idx].replace('.jpg', '.png'))
image = cv2.imread(img_path)
label = cv2.imread(lbl_path, 0)
image = cv2.resize(image, (512, 256))
label = cv2.resize(label, (512, 256))
image = image.astype(np.float32) / 255.0
label = label.astype(np.float32) / 255.0
image = np.transpose(image, (2, 0, 1))
label = np.expand_dims(label, axis=0)
return torch.from_numpy(image), torch.from_numpy(label)
def train(model, dataloader, criterion, optimizer, epochs=10):
model.train()
for epoch in range(epochs):
running_loss = 0.0
for i, (inputs, labels) in enumerate(dataloader):
inputs, labels = inputs.cuda(), labels.cuda()
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
print(f'Epoch [{epoch+1}/{epochs}], Loss: {running_loss/len(dataloader)}')
# 示例:训练模型
dataset = LaneDataset('datasets/train_set/images', 'datasets/train_set/labels')
dataloader = DataLoader(dataset, batch_size=4, shuffle=True)
criterion = nn.BCEWithLogitsLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
train(model, dataloader, criterion, optimizer, epochs=10)
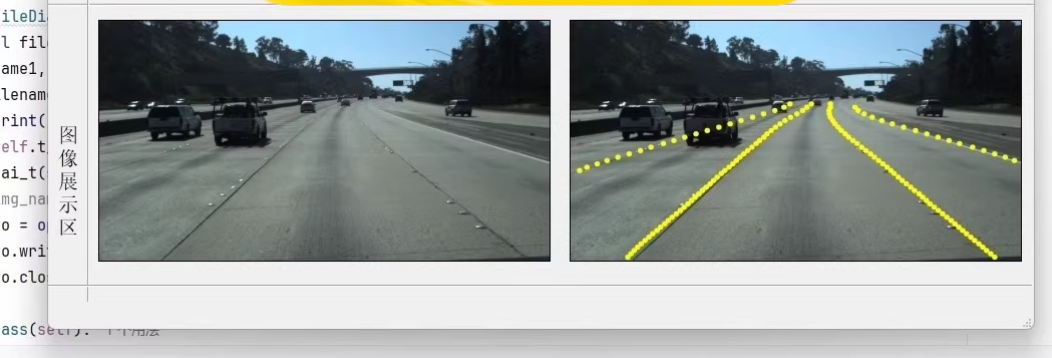
6. 推理与用户界面设计
使用OpenCV和PyQt5设计用户界面,并展示检测结果。
推理代码
def detect_lanes(model, image_path):
image = cv2.imread(image_path)
image = cv2.resize(image, (512, 256))
image = image.astype(np.float32) / 255.0
image = np.transpose(image, (2, 0, 1))
image = torch.from_numpy(image).unsqueeze(0).cuda()
model.eval()
with torch.no_grad():
output = model(image)
output = torch.sigmoid(output).cpu().numpy()[0][0]
output = (output * 255).astype(np.uint8)
output = cv2.resize(output, (image.shape[2], image.shape[1]))
return output
# 示例:检测车道线
detected_image = detect_lanes(model, 'path/to/image.jpg')
cv2.imshow('Detected Lanes', detected_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
用户界面代码
import sys
from PyQt5.QtWidgets import QApplication, QMainWindow, QPushButton, QLabel, QVBoxLayout, QWidget, QFileDialog
from PyQt5.QtGui import QPixmap
import cv2
class LaneDetectionApp(QMainWindow):
def __init__(self):
super().__init__()
self.setWindowTitle('车道线检测系统')
self.setGeometry(100, 100, 800, 600)
self.initUI()
def initUI(self):
self.loadButton = QPushButton('加载图片', self)
self.loadButton.clicked.connect(self.load_image)
self.detectButton = QPushButton('检测', self)
self.detectButton.clicked.connect(self.detect_lanes)
self.imageLabel = QLabel(self)
layout = QVBoxLayout()
layout.addWidget(self.loadButton)
layout.addWidget(self.detectButton)
layout.addWidget(self.imageLabel)
container = QWidget()
container.setLayout(layout)
self.setCentralWidget(container)
def load_image(self):
options = QFileDialog.Options()
file_name, _ = QFileDialog.getOpenFileName(self, "选择图片", "", "Images (*.png *.xpm *.jpg *.bmp);;All Files (*)", options=options)
if file_name:
self.image_path = file_name
pixmap = QPixmap(file_name)
self.imageLabel.setPixmap(pixmap)
def detect_lanes(self):
if hasattr(self, 'image_path'):
detected_image = detect_lanes(model, self.image_path)
height, width = detected_image.shape
bytes_per_line = 1 * width
q_img = QImage(detected_image.data, width, height, bytes_per_line, QImage.Format_Grayscale8)
pixmap = QPixmap.fromImage(q_img)
self.imageLabel.setPixmap(pixmap)
if __name__ == '__main__':
app = QApplication(sys.argv)
window = LaneDetectionApp()
window.show()
sys.exit(app.exec_())
以上就是构建一个基于深度学习的车道线检测系统的详细步骤和代码示例。的关键代码。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









