






引言
3D打印技术已经越来越普及,能够使人们将数字模型转化为实物。在这个项目中,我们将使用STM32微控制器开发一个基础的3D打印机控制系统。通过控制步进电机、加热元件和温度传感器,我们将实现一个简单的FDM(熔融沉积制造)3D打印机控制。
环境准备
在开始项目之前,请确保您已准备好以下硬件和软件环境:
硬件组件:
1. STM32开发板(如STM32F103C8T6或STM32F407)
2. 步进电机(用于控制打印头和打印平台)
3. 步进电机驱动器(如A4988)
4. 热床和挤出机(控制加热元件)
5. 温度传感器(如NTC热敏电阻或DS18B20)
6. 面包板和连接线
7. 电源模块(为STM32和其他外设供电)
软件工具:
1. STM32CubeIDE或Keil uVision(用于开发及编译代码)
2. STM32CubeMX(用于配置STM32外设)
3. STM32 HAL库(确保在项目配置中包含相关库)
项目结构与命名
为了更好地组织代码,我们将本项目分为多个模块,文件结构如下:
- `main.c`:主程序逻辑
- `motor.c`:步进电机控制逻辑
- `heater.c`:加热元件控制逻辑
- `temperature.c`:温度传感器逻辑
- `gcodeparser.c`:G-code解析逻辑
代码示例
1. 初始化配置
使用STM32CubeMX对项目进行初始化配置,包括时钟、GPIO和ADC(用于读取温度传感器)设置。
2. 步进电机控制
在`motor.c`文件中实现步进电机的控制逻辑:
3. 温度控制
在`temperature.c`文件中实现温度传感器的读取逻辑:
4. 加热元件控制
在`heater.c`文件中实现加热元件的控制:
5. G-code解析
在`gcodeparser.c`文件中解析G-code并执行相应命令:
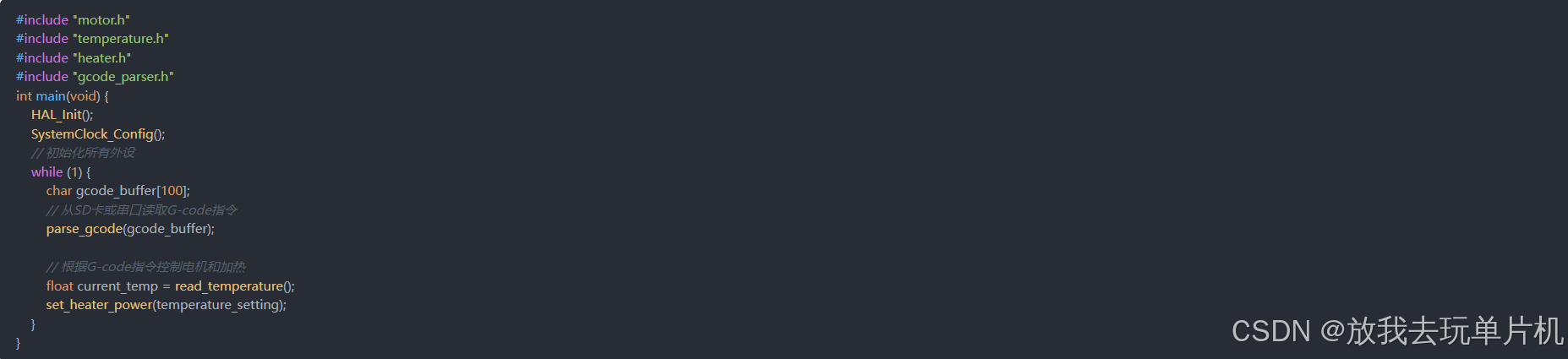
6. 主函数
在`main.c`文件中,编写主程序逻辑:
常见问题与解决方案
问题1:步进电机不转动
解决方案:
- 检查电机连接,确认步进电机驱动器的引脚正确连接。
- 验证电源是否正常,步进电机是否有充足的电流。
问题2:温度读取不准确
解决方案:
- 确保温度传感器的连接正确,验证传感器是否正常工作。
- 增加适当的滤波和校准算法,以提高温度读取的准确性。
问题3:加热元件未达到设定温度
解决方案:
- 检查PWM信号的生成功能,确认加热元件的控制逻辑是否正常。
- 确保加热元件的功率足以达到设定的目标温度。
结论
通过本项目,我们成功搭建了一个基础的3D打印机控制系统,能够控制步进电机和加热元件。这为使用STM32开发功能丰富的3D打印机提供了基础,您可以在此基础上继续扩展功能,如增加LCD显示、SD卡存储、联网控制等功能。希望这篇文章对您的STM32开发之旅有所帮助!

















 940
940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









