






首先介绍一下硬件,我的是一款225的机架,四合一电调4-6s(T-MOTOR Velox V50A SE),电机3-4s(T-MOTOR F60PROIV),kv值是2550。飞控是Pixhawk 6C,遥控器是乐迪AT9s pro。用QGC烧录烧录PX4固件,讲两个版本(1.14与1.13),因为这两个版本区别稍微大些。下面是飞控6c的官方说明
https://px-4.com/main/en/assembly/quick_start_pixhawk6c.html
目录
一、组装机架
根据自己买的硬件组装起来,此时先不装桨叶。下面图片是组装好的(由于我在室内飞行,用光流,所以没加GPS,要是加GPS也不影响跟着我的步骤来,GPS校准很简单在后面)
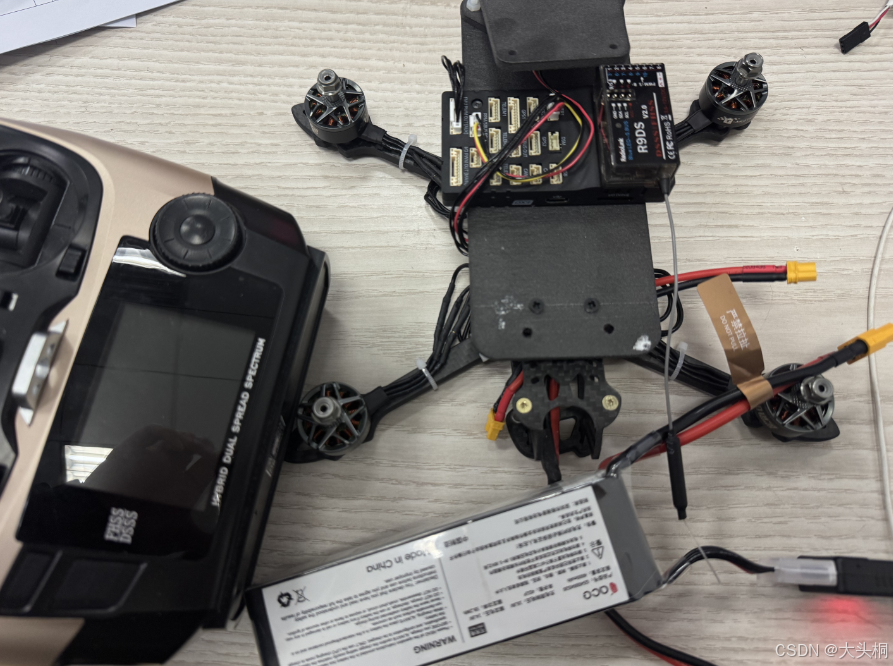
还有一张侧视图

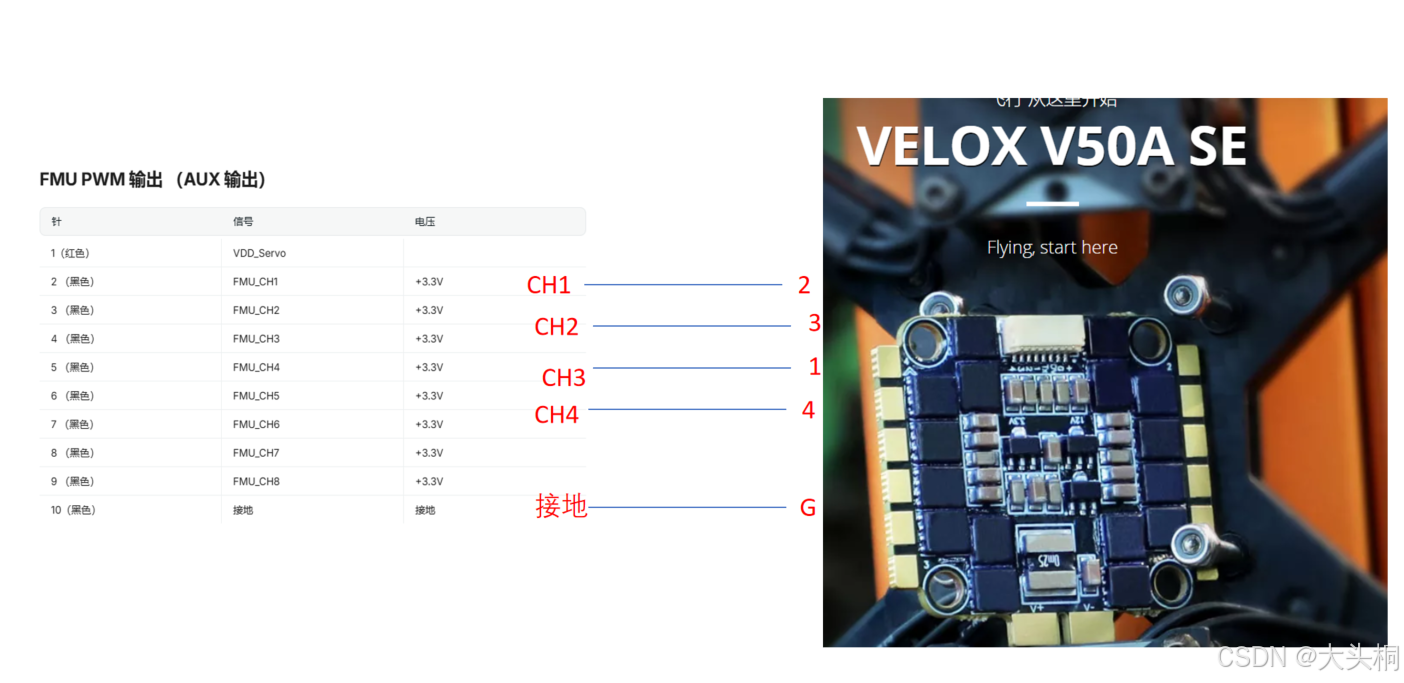
这里提一下,注意:飞控与4合一电调的连接线,一定不要搞错了,我这里4个电机,所以4根信号线然后一根信号地,下面是我的接线图,还有电机三电焊接处的三根线可以随意焊(不是4合一电调不要管上面注意)
二、烧录固件及QGC地面站参数调节
1、烧录自己对应的固件
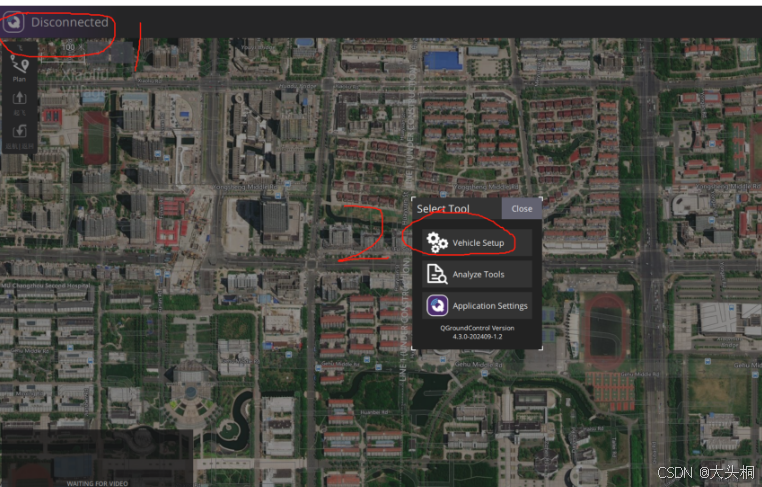
首先打开地面站,先不连接飞控,然后如下按顺序点击
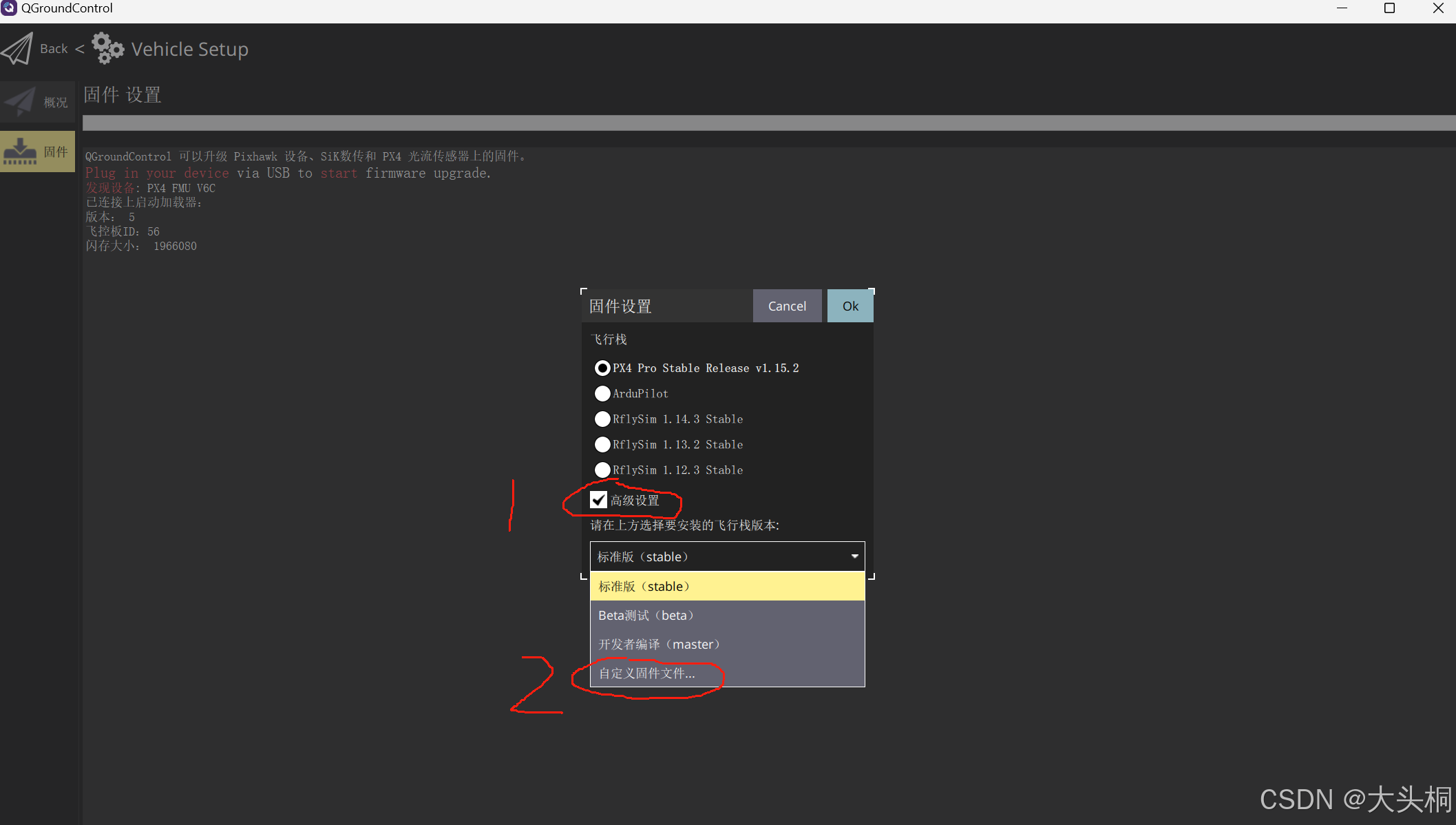
然后点击固件
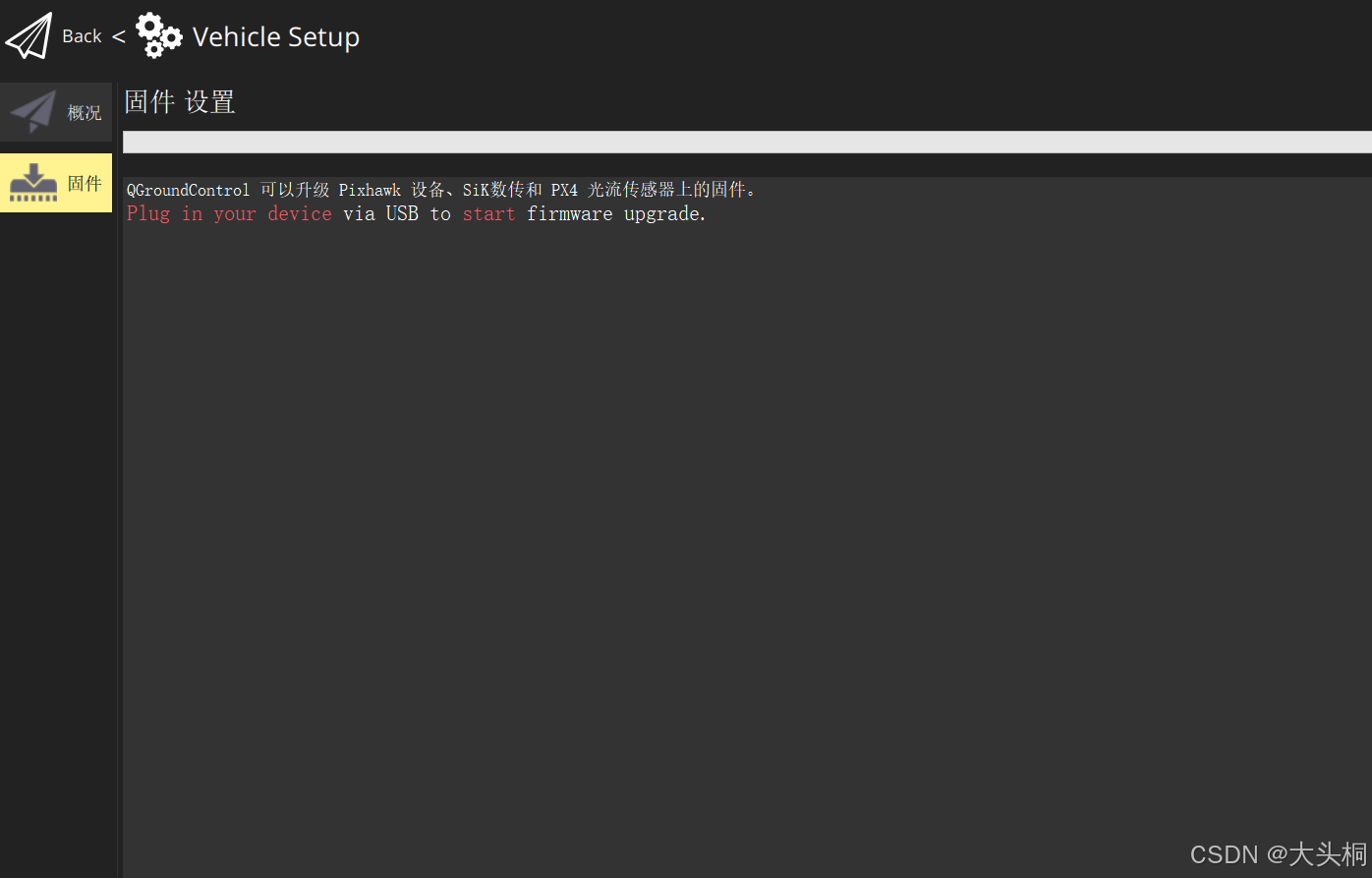
到这里再通过usb插上飞控,然后点击高级设置,点击自定义固件文件,然后选好自己想要烧录的固件版本(注意不同的飞控有不同的固件版本对应,这里不要搞错,如果弄不清除,直接选择地面站推荐的版本)
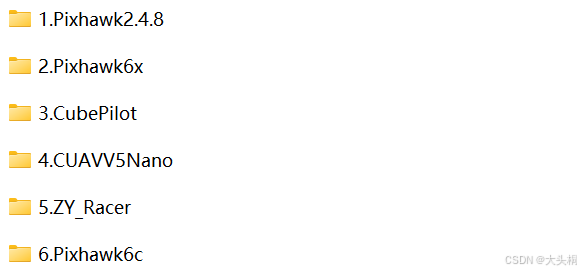
给大家普及一下,目前用的较多的飞控,下面图中每个飞控里面都有自己对应的一些固件版本
2、机架选择
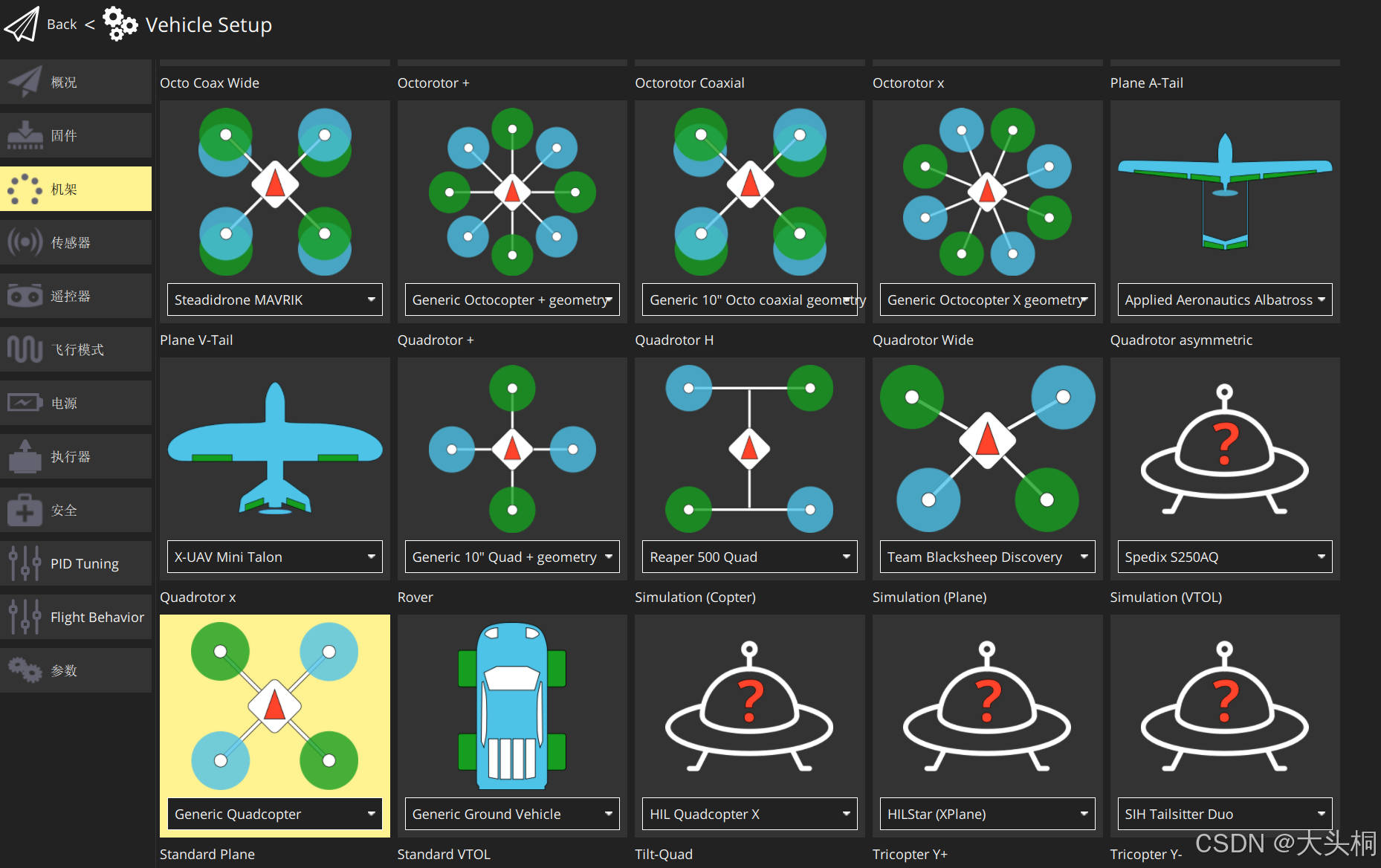
这里我说一下,你们刚烧录的飞控,最好重置一下固件参数,然后图中机架、传感器等这些上面就会有小红点。由于我都校准好了,所以没有。再进入正文
跟我一样是多旋翼X型,就直接选择下图中机架,然后滑到上面点击应用并重启
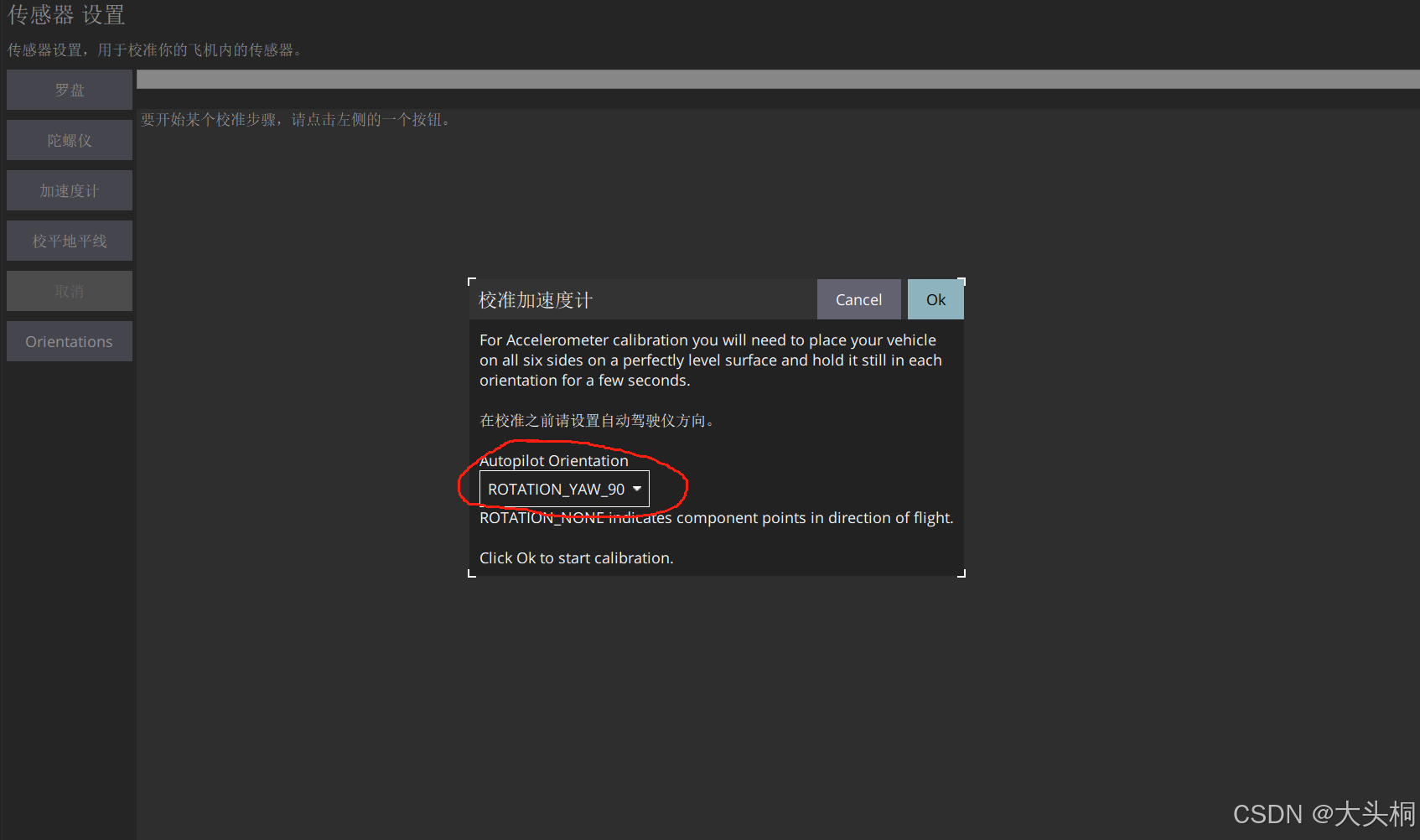
3、传感器校准
这里注意,大家要是跟我一样,飞控安装方向不在正前方,到这里就需要调整一下角度了,除了这里别的都不要管。我是下面第二种安装,因此是ROTATION_YAW_90(要是与机头方向一致则这里不要管直接依次正常校准,然后到第4步)
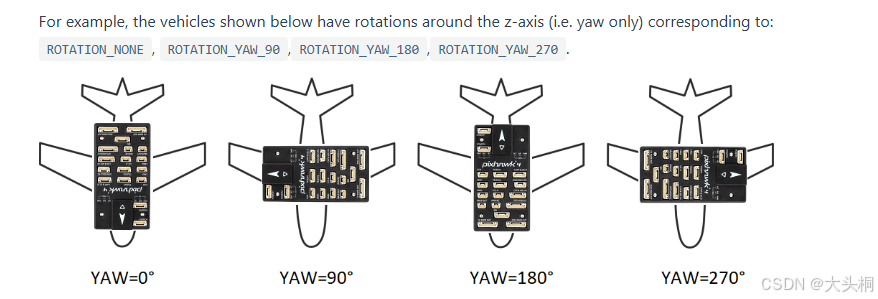
所以在校准传感器的时候按下图中选择自己的飞控安装角度然后校准(其他角度不懂的可以留言)
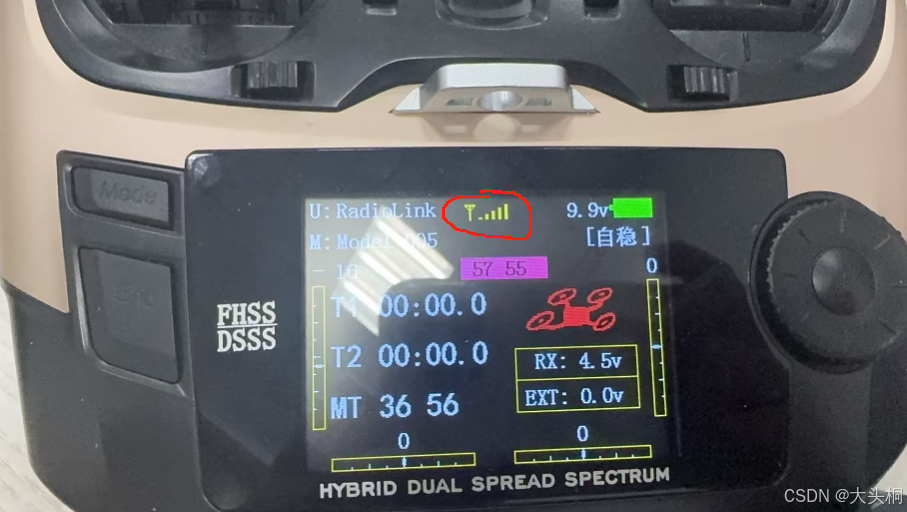
4、遥控器校准
此时要确保遥控器一定与飞控通信成功(bb响与飞控正确接线),打开自己遥控器,下图红圈中满格则正常(遥控器里面需要的其他一些小设置不叙述,比如选择机型等自行查阅资料)
然后开始校准遥控器,点击校准
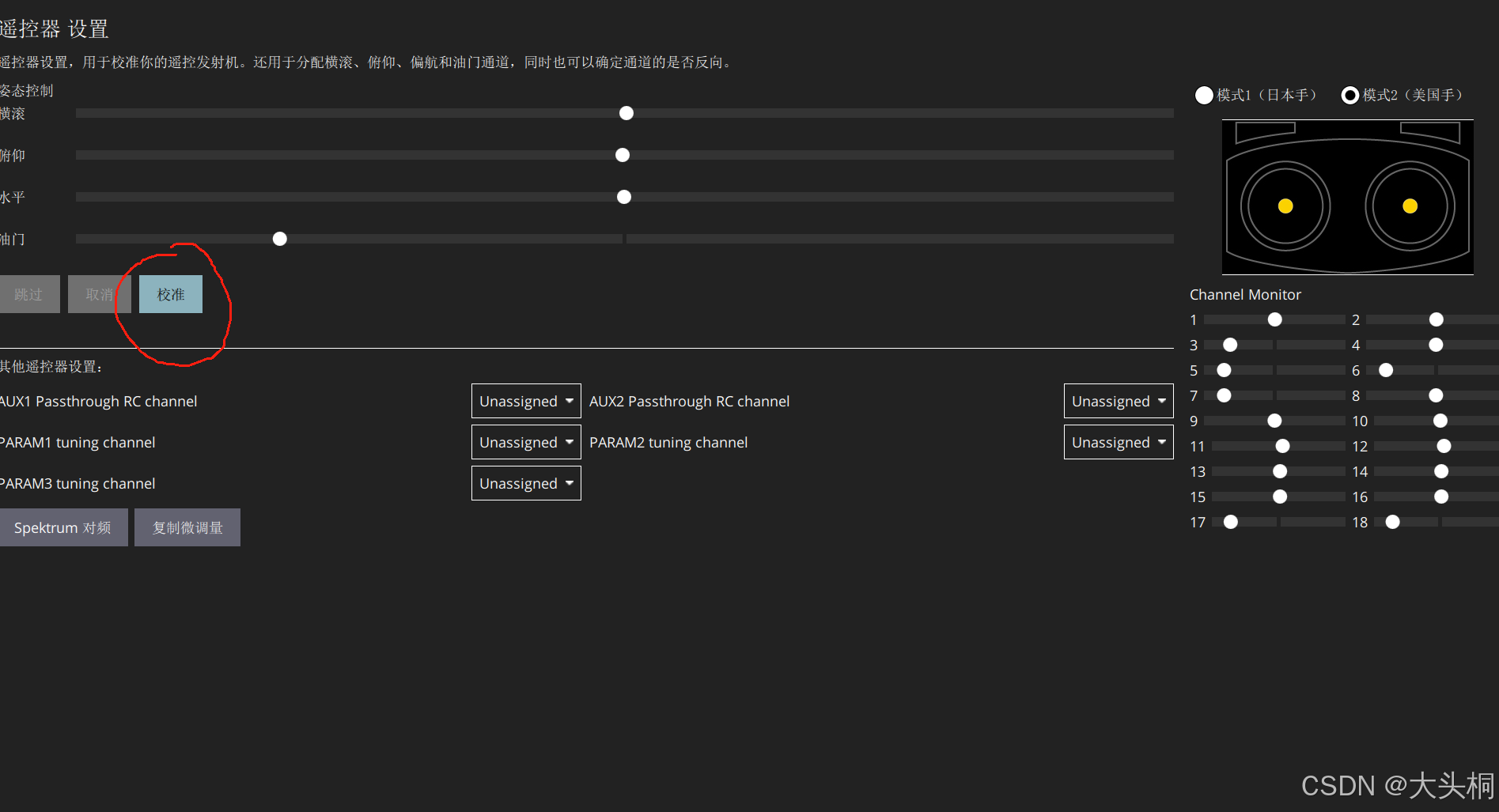
然后按照上面提示进行即可,很简单。
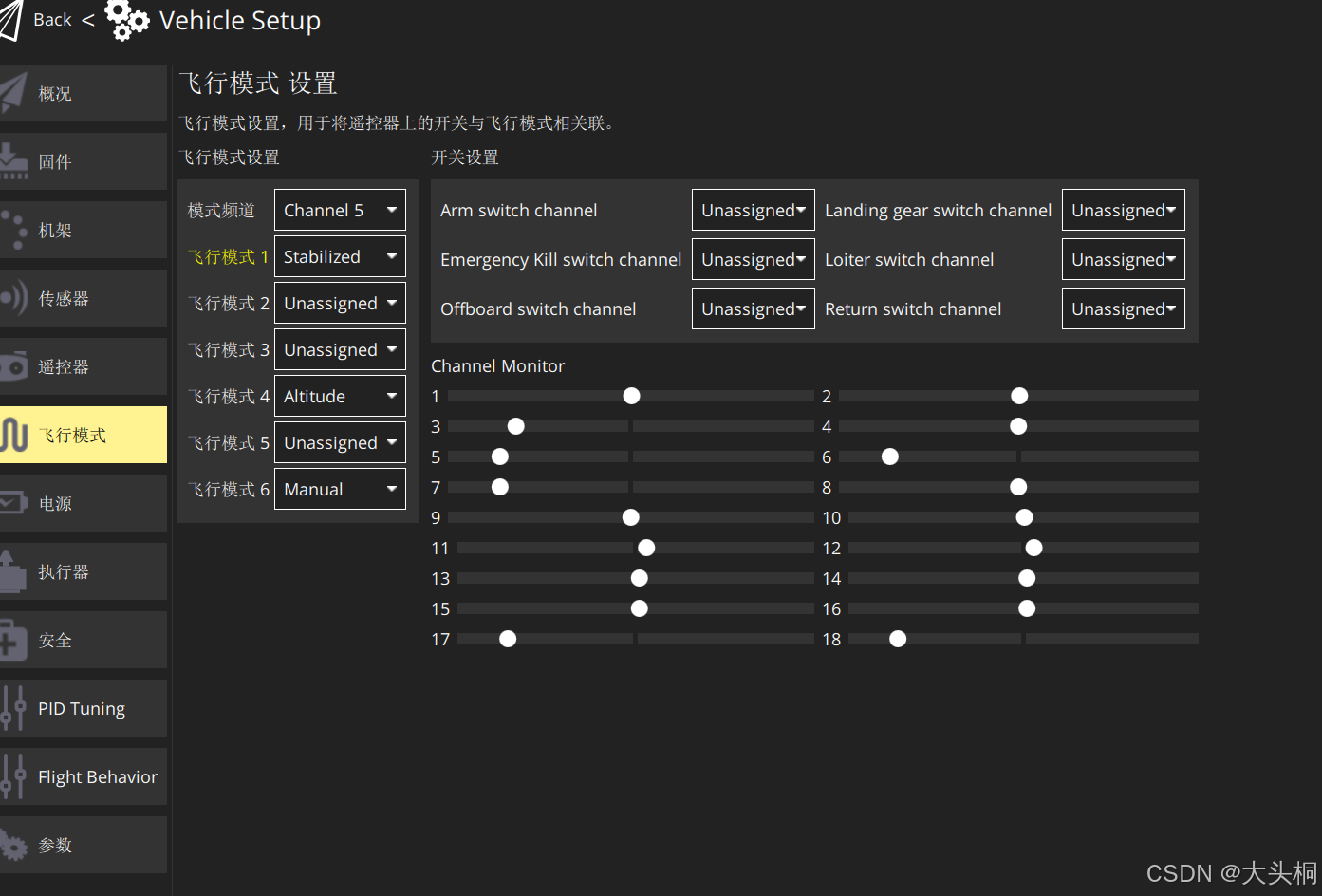
5、飞行模式设置
此时我只采用5通道,然后通过一个三段开关控制三个模式。
我的是乐迪AT9s pro遥控器,别的遥控器自行查阅资料,先长按Mode
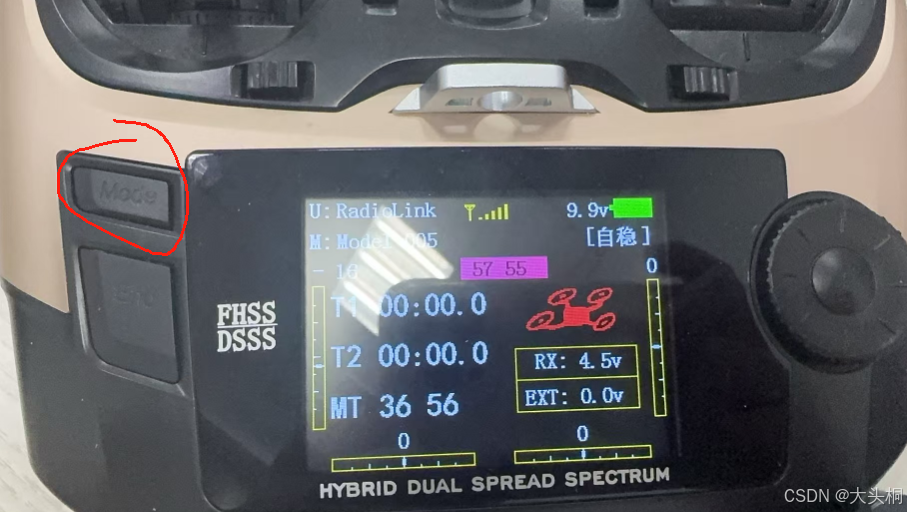
然后选择辅助通道
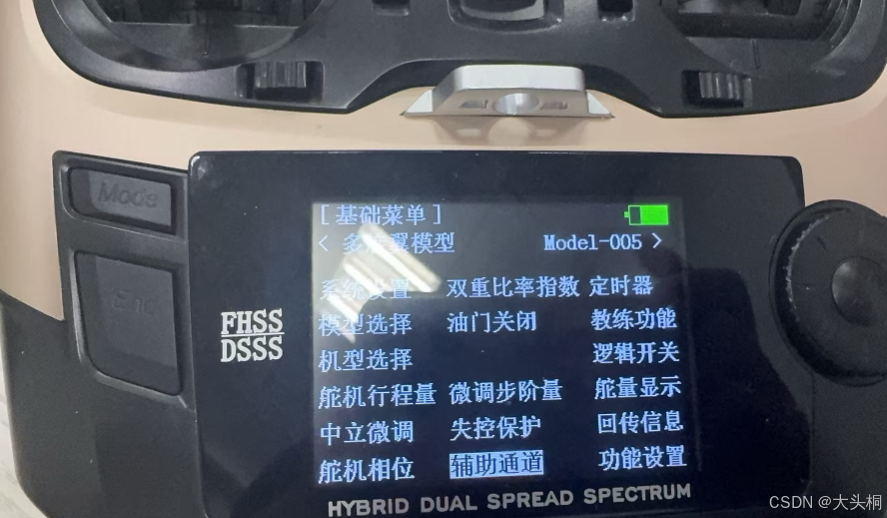
然后进入五通
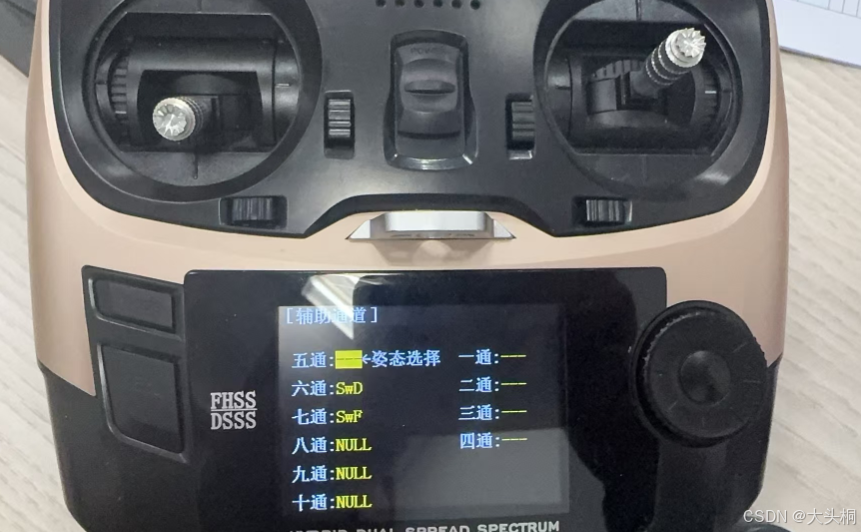
配置跟我一样

然后在地面站中先选择模式通道,然后选择飞控模式,按照图下修改。
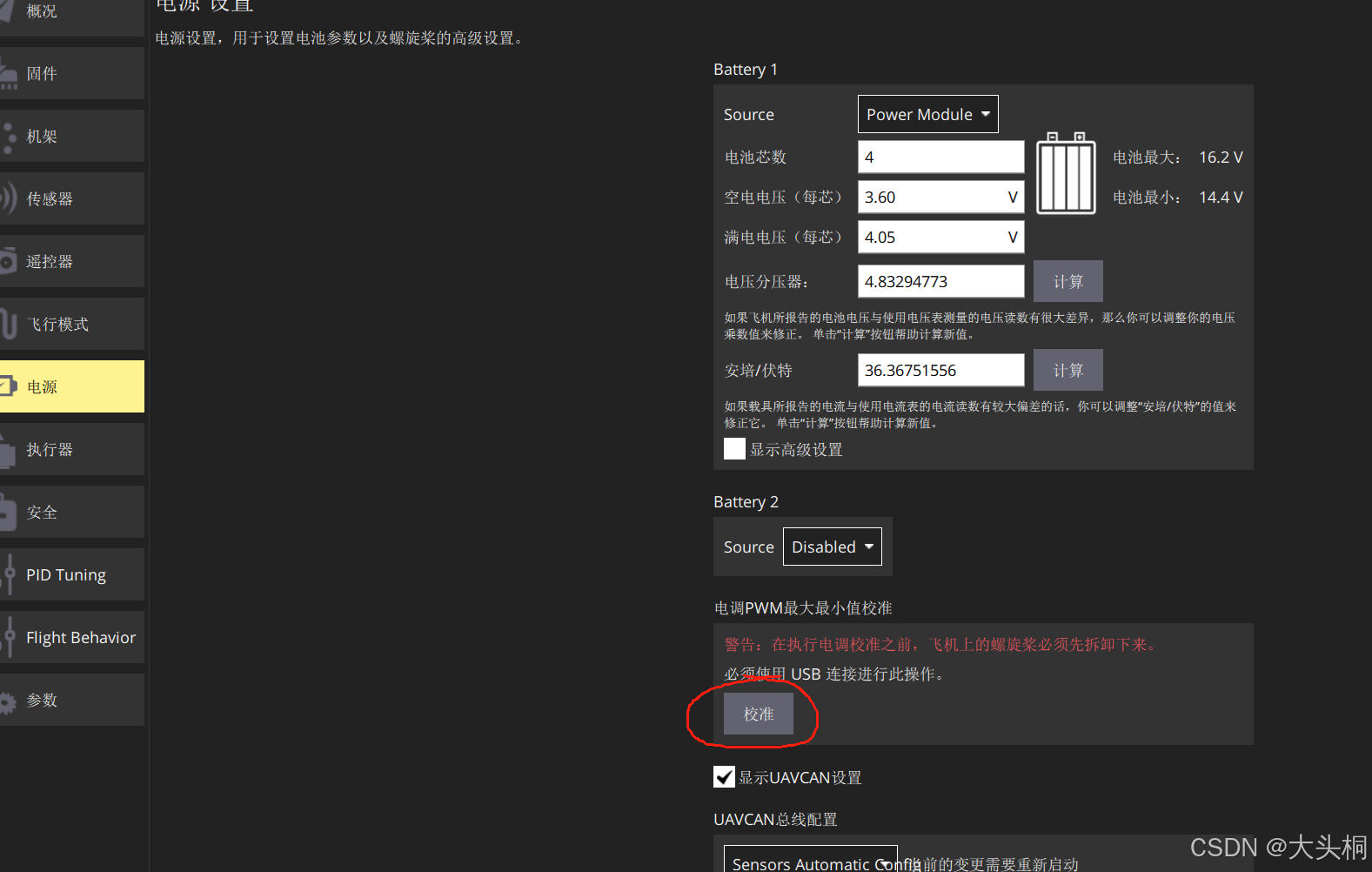
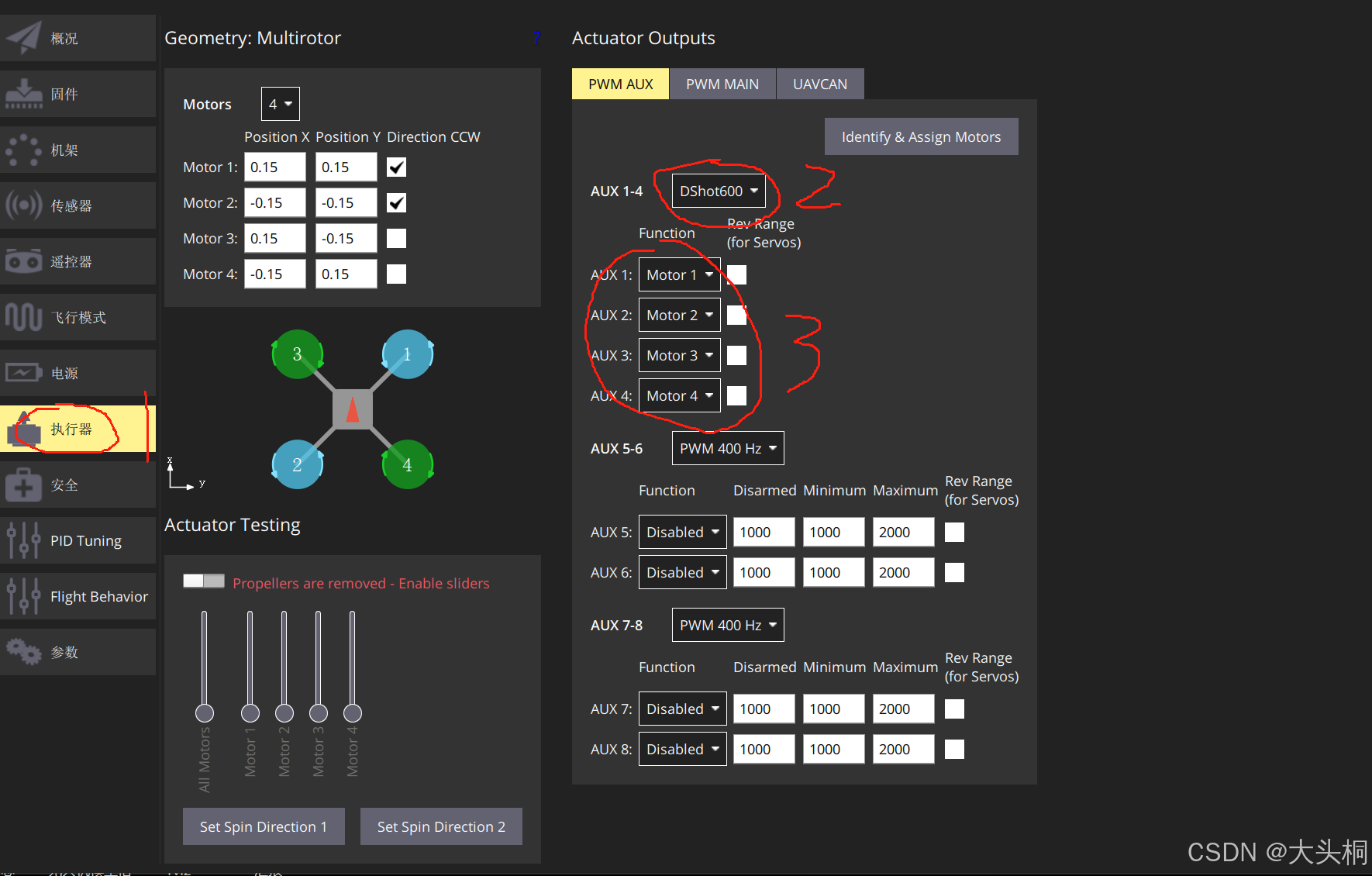
6、电调校准与不校准(PWM与DShot)
先强调一下Pixhawk 6C有两个电机输出口,一个是FMU(AUX),另外一个是I/O(MAIN)。io那边不支持dshot协议。要使用dhsot,只能接到fmu那边!!!!!!!!!!!!dshot不用校准,普通PWM电调要校准
先说第一种选择PWM输出,此时是需要校准电调的,注意先不接电池也不要装桨叶!!!!!然后将遥控器的油门值推到最高,此时可以点击下图中的校准,然后上面会出现提示,马上插上电池,此时正在校准,电机会发发出响声,然后将油门拉到最低,最后拔掉电池,校准完成。但是我更推荐第二种。
第二种是选DShot但是不要校准电调了,直接根据下图操作,图中3是设置电机别忘了,然后重启飞控,此时可以插电池了,要是解锁后电机不转,可以再校准一下遥控器,或者再点击一下电源然后点执行器。
这里注意注意一下,下图中3里面的白色的小框千万别勾上,那是舵机正反转用的,不然0油门就是最高转速直接起飞了
(
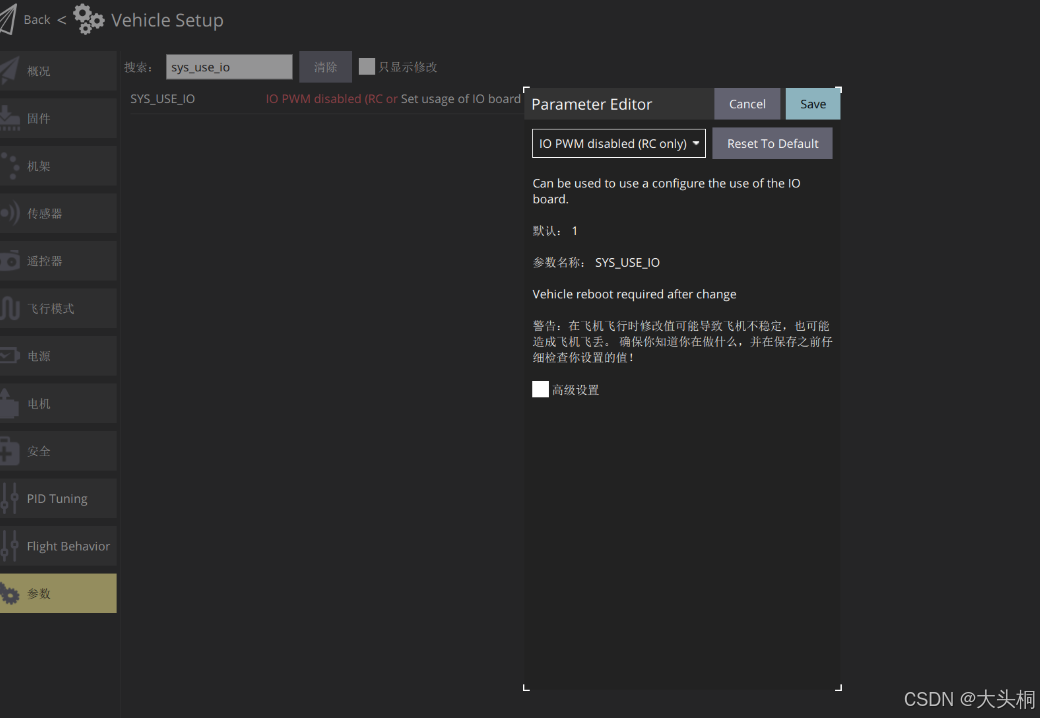
这里补充一下,你要是1.13版本固件,DShot需要在参数里面查找后开启,然后把sys_use_io改成disabled, 这个是改输出通道的,1.13那飞控默认是io那边输出,因此需要关掉。如下图

 )试试
)试试
到此你的飞机可以起飞了,安装桨叶的时候一定要注意正反与方向啦,还有重心问题也要注意,时间有限,还有一些细节与问题后面再补充。


















 1029
1029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









