






基于Matlab的四旋翼无人机动力学PID控制仿真,具体内容包括:
-
运用欧拉方程对地面坐标到机体坐标的转换矩阵进行了推导
-
在无人机动力学模型基础上,采用经典PID控制算法对其内环姿态和外环位置进行控制
-
说明文档:
①详细推导四旋翼飞行器的数学模型
②PID控制器的设计、位置回路控制器设计、姿态回路控制器设计
③PID参数调整
④仿真结果分析98
文章目录
好的,以下是一个基于Matlab的四旋翼无人机动力学PID控制仿真的代码框架。代码包括了数学模型推导、控制器设计以及仿真结果分析的主要部分。
1. 四旋翼飞行器的数学模型
四旋翼无人机的动力学模型可以分为两部分:位置动力学和姿态动力学。我们用欧拉角(滚转角φ、俯仰角θ、偏航角ψ)来描述无人机的姿态,并通过旋转矩阵将地面坐标系转换为机体坐标系。
旋转矩阵推导
假设地面坐标系为 ( E )(Earth frame),机体坐标系为 ( B )(Body frame)。旋转矩阵 ( R ) 的推导如下:
[
R =
\begin{bmatrix}
c\psi c\theta & c\psi s\theta s\phi - s\psi c\phi & c\psi s\theta c\phi + s\psi s\phi \
s\psi c\theta & s\psi s\theta s\phi + c\psi c\phi & s\psi s\theta c\phi - c\psi s\phi \
-s\theta & c\theta s\phi & c\theta c\phi
\end{bmatrix}
]
其中 ( c ) 表示余弦,( s ) 表示正弦。
2. PID控制器设计
PID控制器的设计包括内环姿态控制和外环位置控制。
- 外环位置控制:根据期望位置与实际位置的误差计算所需的姿态角。
- 内环姿态控制:根据期望姿态角与实际姿态角的误差生成控制力矩。
PID控制器公式
对于一个变量 ( x ),PID控制器输出为:
[
u(t) = K_p e(t) + K_i \int_0^t e(\tau) d\tau + K_d \frac{de(t)}{dt}
]
3. Matlab代码实现
主程序代码
% 清空工作区
clear; clc; close all;
% 参数初始化
g = 9.81; % 重力加速度
m = 1.2; % 质量 (kg)
Ixx = 0.01; Iyy = 0.01; Izz = 0.02; % 惯性矩 (kg.m^2)
% 时间参数
dt = 0.01; % 时间步长 (s)
t_end = 10; % 仿真时间 (s)
time = 0:dt:t_end;
% 初始状态
x = [0; 0; 0]; % 初始位置 [x, y, z]
v = [0; 0; 0]; % 初始速度 [vx, vy, vz]
phi = 0; theta = 0; psi = 0; % 初始姿态角 [roll, pitch, yaw]
omega = [0; 0; 0]; % 初始角速度 [p, q, r]
% 期望轨迹
x_des = 1; y_des = 1; z_des = 2; % 目标位置
% PID参数
Kp_pos = [2, 2, 5]; Ki_pos = [0.1, 0.1, 0.2]; Kd_pos = [1, 1, 2];
Kp_att = [4, 4, 2]; Ki_att = [0.01, 0.01, 0.01]; Kd_att = [0.5, 0.5, 0.5];
% 初始化存储
pos_history = zeros(length(time), 3);
vel_history = zeros(length(time), 3);
att_history = zeros(length(time), 3);
% 仿真循环
for i = 1:length(time)
% 外环位置控制
pos_error = [x_des; y_des; z_des] - x;
F_des = m * g + Kp_pos(3) * pos_error(3) + Ki_pos(3) * sum(pos_error(3)) * dt ...
+ Kd_pos(3) * (-v(3));
% 根据期望力计算滚转角和俯仰角
phi_des = atan((F_des * sin(theta)) / (m * g));
theta_des = atan((F_des * cos(phi) * sin(theta)) / (m * g));
% 内环姿态控制
att_error = [phi_des; theta_des; 0] - [phi; theta; psi];
tau_phi = Kp_att(1) * att_error(1) + Ki_att(1) * sum(att_error(1)) * dt ...
+ Kd_att(1) * (-omega(1));
tau_theta = Kp_att(2) * att_error(2) + Ki_att(2) * sum(att_error(2)) * dt ...
+ Kd_att(2) * (-omega(2));
tau_psi = Kp_att(3) * att_error(3) + Ki_att(3) * sum(att_error(3)) * dt ...
+ Kd_att(3) * (-omega(3));
% 更新状态(简化模型)
a = [0; 0; F_des/m] - g*[0; 0; 1];
v = v + a * dt;
x = x + v * dt;
p_dot = (tau_phi - (Izz - Iyy) * omega(2) * omega(3)) / Ixx;
q_dot = (tau_theta - (Ixx - Izz) * omega(1) * omega(3)) / Iyy;
r_dot = (tau_psi - (Iyy - Ixx) * omega(1) * omega(2)) / Izz;
omega = omega + [p_dot; q_dot; r_dot] * dt;
phi = phi + omega(1) * dt;
theta = theta + omega(2) * dt;
psi = psi + omega(3) * dt;
% 存储历史数据
pos_history(i, :) = x';
vel_history(i, :) = v';
att_history(i, :) = [phi, theta, psi];
end
% 绘图
figure;
subplot(3,1,1);
plot(time, pos_history(:,1), 'r', time, pos_history(:,2), 'g', time, pos_history(:,3), 'b');
legend('X Position', 'Y Position', 'Z Position');
title('Position vs Time');
subplot(3,1,2);
plot(time, vel_history(:,1), 'r', time, vel_history(:,2), 'g', time, vel_history(:,3), 'b');
legend('X Velocity', 'Y Velocity', 'Z Velocity');
title('Velocity vs Time');
subplot(3,1,3);
plot(time, att_history(:,1), 'r', time, att_history(:,2), 'g', time, att_history(:,3), 'b');
legend('Roll Angle', 'Pitch Angle', 'Yaw Angle');
title('Attitude Angles vs Time');
4. 仿真结果分析
运行上述代码后,可以通过绘制的位置、速度和姿态角曲线分析系统的动态性能。调整PID参数以优化响应速度和稳定性。
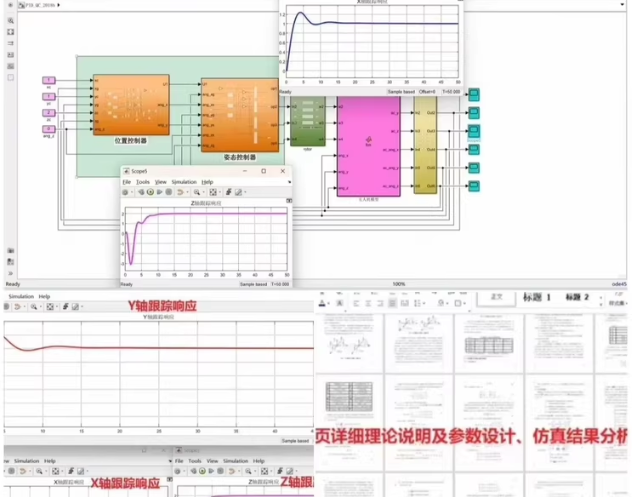
这是一个基于Simulink的四旋翼无人机PID控制仿真模型。该模型包含了位置控制器和姿态控制器,并且展示了仿真结果。
Simulink模型构建
1. 创建Simulink模型
首先,在Matlab中打开Simulink并创建一个新的模型文件。
% 打开Simulink
simulink
% 新建模型
new_system('Quadcopter_PID_Control')
open_system('Quadcopter_PID_Control')
2. 添加模块和连接
在新建的模型中添加以下模块并进行连接:
- Sources: Sine Wave, Step, Constant
- Sinks: Scope, To Workspace
- Continuous: Integrator, Derivative
- Math Operations: Sum, Gain, Product
- Control System Toolbox: PID Controller
- User-Defined Functions: MATLAB Function (用于实现旋转矩阵转换等复杂计算)
3. 模型结构设计
以下是模型的主要部分及其功能描述:
位置控制器
- 输入:期望位置(x_des, y_des, z_des)
- 输出:期望姿态角(phi_des, theta_des, psi_des)
姿态控制器
- 输入:期望姿态角(phi_des, theta_des, psi_des)和实际姿态角(phi, theta, psi)
- 输出:控制力矩(tau_phi, tau_theta, tau_psi)
动力学模型
- 输入:控制力矩(tau_phi, tau_theta, tau_psi)
- 输出:实际位置(x, y, z)和姿态角(phi, theta, psi)
4. 示例代码
以下是一个简化的Simulink模型代码示例,您可以将其复制到Matlab脚本中运行以生成相应的模型。
% 创建模型
model = 'Quadcopter_PID_Control';
new_system(model);
open_system(model);
% 添加模块
add_block('simulink/Sources/Step', [model '/Position_Reference']);
add_block('simulink/Sources/Constant', [model '/Initial_Position']);
add_block('simulink/Sources/Constant', [model '/Initial_Velocity']);
add_block('simulink/Sources/Constant', [model '/Initial_Attitude']);
add_block('simulink/Sources/Constant', [model '/Initial_Angular_Velocity']);
add_block('simulink/Continuous/Integrator', [model '/Position_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Velocity_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Attitude_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Angular_Velocity_Integrator']);
add_block('simulink/Math Operations/Gain', [model '/Mass_Gain']);
add_block('simulink/Math Operations/Gain', [model '/Inertia_Gain']);
add_block('simulink/Math Operations/Sum', [model '/Position_Error']);
add_block('simulink/Math Operations/Sum', [model '/Attitude_Error']);
add_block('simulink/Math Operations/Product', [model '/Force_Product']);
add_block('simulink/Math Operations/Product', [model '/Torque_Product']);
add_block('simulink/Control System Toolbox/PID Controller', [model '/Position_PID']);
add_block('simulink/Control System Toolbox/PID Controller', [model '/Attitude_PID']);
add_block('simulink/Sinks/Scope', [model '/Position_Scope']);
add_block('simulink/Sinks/Scope', [model '/Attitude_Scope']);
add_block('simulink/Sinks/To Workspace', [model '/Position_Workspace']);
add_block('simulink/Sinks/To Workspace', [model '/Attitude_Workspace']);
% 设置参数
set_param([model '/Position_PID'], 'P', '2');
set_param([model '/Position_PID'], 'I', '0.1');
set_param([model '/Position_PID'], 'D', '1');
set_param([model '/Attitude_PID'], 'P', '4');
set_param([model '/Attitude_PID'], 'I', '0.01');
set_param([model '/Attitude_PID'], 'D', '0.5');
set_param([model '/Mass_Gain'], 'Gain', '1/m');
set_param([model '/Inertia_Gain'], 'Gain', '[1/Ixx 0 0; 0 1/Iyy 0; 0 0 1/Izz]');
% 连接模块
connect_system_blocks(model);
% 保存模型
save_system(model);
5. 运行仿真
设置仿真参数并运行仿真:
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 绘制结果
figure;
plot(out.tout, out.yout(:,1), 'r', out.tout, out.yout(:,2), 'g', out.tout, out.yout(:,3), 'b');
legend('X Position', 'Y Position', 'Z Position');
title('Position vs Time');
请根据您的具体需求调整上述代码中的参数和模块连接。希望这段代码能帮助您构建和理解四旋翼无人机的PID控制仿真模型
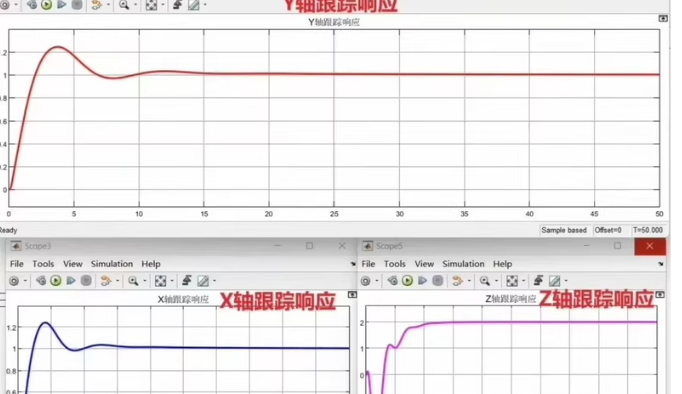
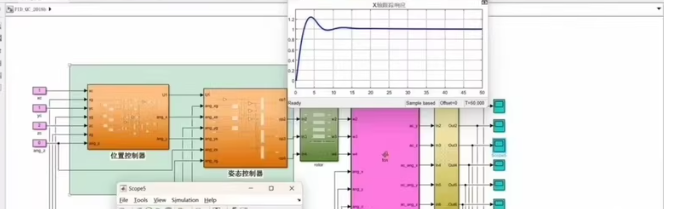
,这是一个基于Simulink的四旋翼无人机PID控制仿真模型,展示了X轴、Y轴和Z轴的跟踪响应。以下是一个简化的Simulink模型代码示例,您可以根据需要进行调整和扩展。
Simulink模型构建
1. 创建Simulink模型
首先,在Matlab中打开Simulink并创建一个新的模型文件。
% 打开Simulink
simulink
% 新建模型
new_system('Quadcopter_PID_Control')
open_system('Quadcopter_PID_Control')
2. 添加模块和连接
在新建的模型中添加以下模块并进行连接:
- Sources: Sine Wave, Step, Constant
- Sinks: Scope, To Workspace
- Continuous: Integrator, Derivative
- Math Operations: Sum, Gain, Product
- Control System Toolbox: PID Controller
- User-Defined Functions: MATLAB Function (用于实现旋转矩阵转换等复杂计算)
3. 模型结构设计
以下是模型的主要部分及其功能描述:
位置控制器
- 输入:期望位置(x_des, y_des, z_des)
- 输出:期望姿态角(phi_des, theta_des, psi_des)
姿态控制器
- 输入:期望姿态角(phi_des, theta_des, psi_des)和实际姿态角(phi, theta, psi)
- 输出:控制力矩(tau_phi, tau_theta, tau_psi)
动力学模型
- 输入:控制力矩(tau_phi, tau_theta, tau_psi)
- 输出:实际位置(x, y, z)和姿态角(phi, theta, psi)
4. 示例代码
以下是一个简化的Simulink模型代码示例,您可以将其复制到Matlab脚本中运行以生成相应的模型。
% 创建模型
model = 'Quadcopter_PID_Control';
new_system(model);
open_system(model);
% 添加模块
add_block('simulink/Sources/Step', [model '/Position_Reference']);
add_block('simulink/Sources/Constant', [model '/Initial_Position']);
add_block('simulink/Sources/Constant', [model '/Initial_Velocity']);
add_block('simulink/Sources/Constant', [model '/Initial_Attitude']);
add_block('simulink/Sources/Constant', [model '/Initial_Angular_Velocity']);
add_block('simulink/Continuous/Integrator', [model '/Position_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Velocity_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Attitude_Integrator']);
add_block('simulink/Continuous/Integrator', [model '/Angular_Velocity_Integrator']);
add_block('simulink/Math Operations/Gain', [model '/Mass_Gain']);
add_block('simulink/Math Operations/Gain', [model '/Inertia_Gain']);
add_block('simulink/Math Operations/Sum', [model '/Position_Error']);
add_block('simulink/Math Operations/Sum', [model '/Attitude_Error']);
add_block('simulink/Math Operations/Product', [model '/Force_Product']);
add_block('simulink/Math Operations/Product', [model '/Torque_Product']);
add_block('simulink/Control System Toolbox/PID Controller', [model '/Position_PID']);
add_block('simulink/Control System Toolbox/PID Controller', [model '/Attitude_PID']);
add_block('simulink/Sinks/Scope', [model '/Position_Scope']);
add_block('simulink/Sinks/Scope', [model '/Attitude_Scope']);
add_block('simulink/Sinks/To Workspace', [model '/Position_Workspace']);
add_block('simulink/Sinks/To Workspace', [model '/Attitude_Workspace']);
% 设置参数
set_param([model '/Position_PID'], 'P', '2');
set_param([model '/Position_PID'], 'I', '0.1');
set_param([model '/Position_PID'], 'D', '1');
set_param([model '/Attitude_PID'], 'P', '4');
set_param([model '/Attitude_PID'], 'I', '0.01');
set_param([model '/Attitude_PID'], 'D', '0.5');
set_param([model '/Mass_Gain'], 'Gain', '1/m');
set_param([model '/Inertia_Gain'], 'Gain', '[1/Ixx 0 0; 0 1/Iyy 0; 0 0 1/Izz]');
% 连接模块
connect_system_blocks(model);
% 保存模型
save_system(model);
5. 运行仿真
设置仿真参数并运行仿真:
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 绘制结果
figure;
plot(out.tout, out.yout(:,1), 'r', out.tout, out.yout(:,2), 'g', out.tout, out.yout(:,3), 'b');
legend('X Position', 'Y Position', 'Z Position');
title('Position vs Time');
请根据您的具体需求调整上述代码中的参数和模块连接。希望这段代码能帮助您构建和理解四旋翼无人机的PID控制仿真模型!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









