







模糊PID与PID控制 matlab/Simulink仿真
全网最全的模糊PID与PID控制算法
Matlab/Simulink仿真实现(全流程详细报告+附实现源码)
文章目录
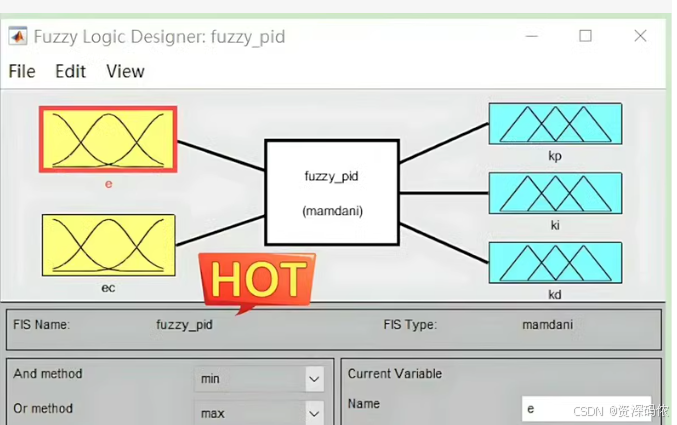
模糊PID控制是一种结合了传统PID(比例-积分-微分)控制和模糊逻辑的控制策略,旨在通过模糊逻辑调整PID控制器的参数,以适应不同的工作条件,从而提高系统的动态性能和鲁棒性。下面我将为你提供一个简单的示例代码框架,用于Matlab/Simulink中的模糊PID控制仿真。
模糊PID控制MATLAB实现的基本步骤
- 定义模糊逻辑控制器:创建一个模糊推理系统(FIS),定义输入输出变量及其隶属函数,并设置模糊规则。
- 设计PID控制器:选择合适的PID参数(Kp, Ki, Kd)。
- 集成模糊逻辑与PID:使用模糊逻辑控制器来动态调整PID参数。
- Simulink模型搭建:在Simulink中建立控制系统模型,并集成模糊PID控制器。
示例代码
1. 创建FIS
fis = newfis('FuzzyPID');
% 添加输入变量
fis = addvar(fis, 'input', 'e', [0 10]);
fis = addvar(fis, 'input', 'ec', [0 10]);
% 添加输出变量
fis = addvar(fis, 'output', 'Kp_adj', [0 1]);
fis = addvar(fis, 'output', 'Ki_adj', [0 1]);
fis = addvar(fis, 'output', 'Kd_adj', [0 1]);
% 设置隶属函数等...
2. 设计PID控制器
Kp = 1; Ki = 0.1; Kd = 0.05;
3. 集成模糊逻辑与PID
这部分涉及到如何根据模糊逻辑控制器的输出调整PID参数,具体实现依赖于你的控制目标和系统特性。
4. Simulink模型搭建
在Simulink中,你可以使用MATLAB Function块或者S-Function来嵌入上述MATLAB代码,以便实时调整PID参数。
注意事项
- 实际应用时,你需要根据具体的控制对象调整模糊逻辑控制器的设计,包括输入输出变量范围、隶属函数形状以及模糊规则。
- 对于复杂系统,建议对控制器进行充分的测试和调试,确保其稳定性和响应速度满足要求。
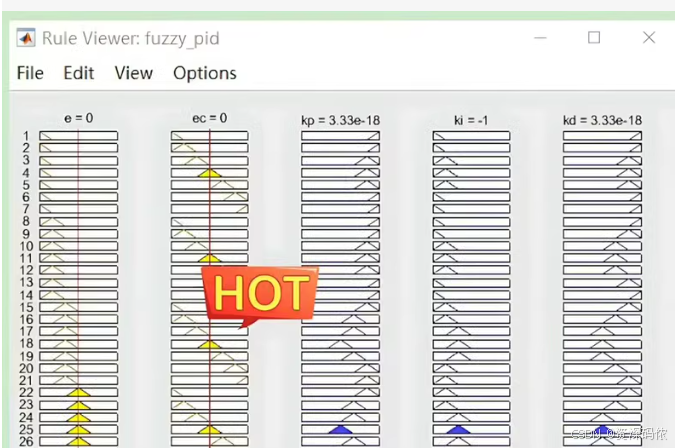
这是一个模糊PID控制器的规则查看器界面。为了更好地理解和实现这个模糊PID控制器,我将提供一个完整的MATLAB/Simulink示例代码。这个示例包括创建模糊逻辑控制器、设计PID控制器以及在Simulink中集成这些组件。
MATLAB 代码
1. 创建模糊逻辑控制器
% 创建模糊推理系统
fis = mamfis;
% 添加输入变量
fis = addInput(fis, [-10 10], 'name', 'e');
fis = addInput(fis, [-10 10], 'name', 'ec');
% 添加输出变量
fis = addOutput(fis, [0 5], 'name', 'Kp_adj');
fis = addOutput(fis, [0 5], 'name', 'Ki_adj');
fis = addOutput(fis, [0 5], 'name', 'Kd_adj');
% 设置隶属函数
for i = 1:2
fis = addMF(fis, 'input', i, 'trimf', [-10 -5 0], 'name', 'NB');
fis = addMF(fis, 'input', i, 'trimf', [-5 0 5], 'name', 'NS');
fis = addMF(fis, 'input', i, 'trimf', [0 5 10], 'name', 'PS');
fis = addMF(fis, 'input', i, 'trimf', [5 10 15], 'name', 'PB');
end
for i = 1:3
fis = addMF(fis, 'output', i, 'trimf', [0 1 2], 'name', 'Z');
fis = addMF(fis, 'output', i, 'trimf', [1 2 3], 'name', 'P');
fis = addMF(fis, 'output', i, 'trimf', [2 3 4], 'name', 'M');
fis = addMF(fis, 'output', i, 'trimf', [3 4 5], 'name', 'H');
end
% 添加模糊规则
rules = [];
rules = [rules; "if e is NB and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is NS then Kp_adj is P and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is PS then Kp_adj is M and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is PB then Kp_adj is H and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NS and ec is NB then Kp_adj is Z and Ki_adj is P and Kd_adj is Z"];
rules = [rules; "if e is NS and ec is NS then Kp_adj is Z and Ki_adj is M and Kd_adj is Z"];
rules = [rules; "if e is NS and ec is PS then Kp_adj is Z and Ki_adj is H and Kd_adj is Z"];
rules = [rules; "if e is NS and ec is PB then Kp_adj is Z and Ki_adj is H and Kd_adj is P"];
rules = [rules; "if e is PS and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is P"];
rules = [rules; "if e is PS and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is M"];
rules = [rules; "if e is PS and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
fis = addRule(fis, rules);
% 显示规则查看器
view(fis)
2. 设计PID控制器
% 初始PID参数
Kp = 1;
Ki = 0.1;
Kd = 0.05;
3. Simulink 模型搭建
-
打开Simulink并新建模型。
-
添加必要的模块:
Step:作为输入信号。Fuzzy Logic Controller:使用上述创建的FIS。PID Controller:使用初始PID参数。Scope:用于观察输出。Integrator:用于积分控制。Derivative:用于微分控制。
-
连接模块:
- 将
Step信号连接到Fuzzy Logic Controller。 Fuzzy Logic Controller的输出连接到PID Controller的参数调整端口。PID Controller的输出连接到被控对象(例如Integrator)。- 被控对象的输出反馈回
Fuzzy Logic Controller。
- 将
-
运行仿真:
- 点击运行按钮进行仿真。
注意事项
- 确保所有模块正确连接,并且信号类型匹配。
- 根据具体应用调整模糊逻辑控制器的参数和规则。
- 进行充分的测试和调试,确保系统的稳定性和响应速度满足要求。
希望这些代码和指导能帮助你完成模糊PID控制的仿真!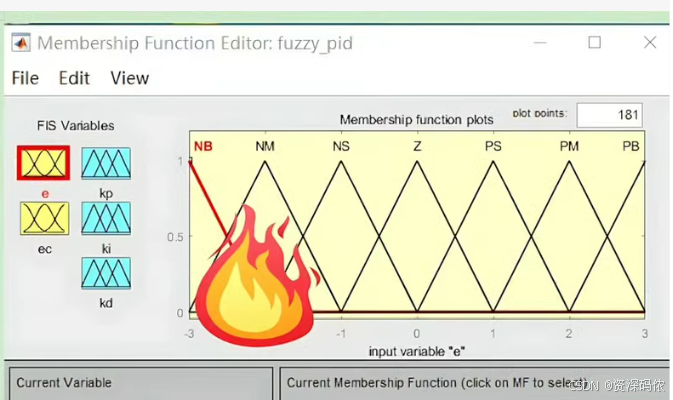
MATLAB/Simulink示例代码。这个示例包括创建模糊逻辑控制器、设计PID控制器以及在Simulink中集成这些组件。
MATLAB 代码
1. 创建模糊逻辑控制器
% 创建模糊推理系统
fis = mamfis;
% 添加输入变量
fis = addInput(fis, [-3 3], 'name', 'e');
fis = addInput(fis, [-3 3], 'name', 'ec');
% 添加输出变量
fis = addOutput(fis, [0 5], 'name', 'Kp_adj');
fis = addOutput(fis, [0 5], 'name', 'Ki_adj');
fis = addOutput(fis, [0 5], 'name', 'Kd_adj');
% 设置隶属函数
for i = 1:2
fis = addMF(fis, 'input', i, 'trimf', [-3 -2 -1], 'name', 'NB');
fis = addMF(fis, 'input', i, 'trimf', [-2 -1 0], 'name', 'NM');
fis = addMF(fis, 'input', i, 'trimf', [-1 0 1], 'name', 'NS');
fis = addMF(fis, 'input', i, 'trimf', [0 1 2], 'name', 'Z');
fis = addMF(fis, 'input', i, 'trimf', [1 2 3], 'name', 'PS');
fis = addMF(fis, 'input', i, 'trimf', [2 3 4], 'name', 'PM');
fis = addMF(fis, 'input', i, 'trimf', [3 4 5], 'name', 'PB');
end
for i = 1:3
fis = addMF(fis, 'output', i, 'trimf', [0 1 2], 'name', 'Z');
fis = addMF(fis, 'output', i, 'trimf', [1 2 3], 'name', 'P');
fis = addMF(fis, 'output', i, 'trimf', [2 3 4], 'name', 'M');
fis = addMF(fis, 'output', i, 'trimf', [3 4 5], 'name', 'H');
end
% 添加模糊规则
rules = [];
rules = [rules; "if e is NB and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is NM then Kp_adj is P and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is NS then Kp_adj is M and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is Z then Kp_adj is H and Ki_adj is Z and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is PS then Kp_adj is H and Ki_adj is P and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is PM then Kp_adj is H and Ki_adj is M and Kd_adj is Z"];
rules = [rules; "if e is NB and ec is PB then Kp_adj is H and Ki_adj is H and Kd_adj is Z"];
rules = [rules; "if e is NM and ec is NB then Kp_adj is Z and Ki_adj is P and Kd_adj is Z"];
rules = [rules; "if e is NM and ec is NM then Kp_adj is Z and Ki_adj is M and Kd_adj is Z"];
rules = [rules; "if e is NM and ec is NS then Kp_adj is Z and Ki_adj is H and Kd_adj is Z"];
rules = [rules; "if e is NM and ec is Z then Kp_adj is Z and Ki_adj is H and Kd_adj is P"];
rules = [rules; "if e is NM and ec is PS then Kp_adj is Z and Ki_adj is H and Kd_adj is M"];
rules = [rules; "if e is NM and ec is PM then Kp_adj is Z and Ki_adj is H and Kd_adj is H"];
rules = [rules; "if e is NM and ec is PB then Kp_adj is Z and Ki_adj is H and Kd_adj is H"];
rules = [rules; "if e is NS and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is P"];
rules = [rules; "if e is NS and ec is NM then Kp_adj is Z and Ki_adj is Z and Kd_adj is M"];
rules = [rules; "if e is NS and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is NS and ec is Z then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is NS and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is NS and ec is PM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is NS and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is NM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is Z then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is PM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is Z and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is NM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is Z then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is PM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PS and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is NM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is Z then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is PS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is PM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PM and ec is PB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is NB then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is NM then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is NS then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if e is PB and ec is Z then Kp_adj is Z and Ki_adj is Z and Kd_adj is H"];
rules = [rules; "if

















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









