







扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现
文章目录

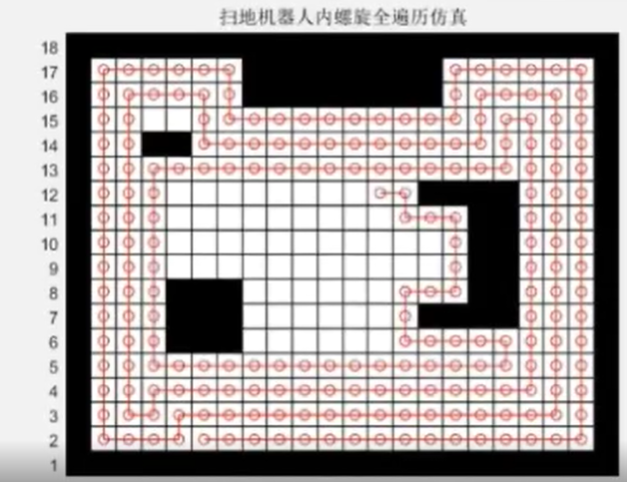
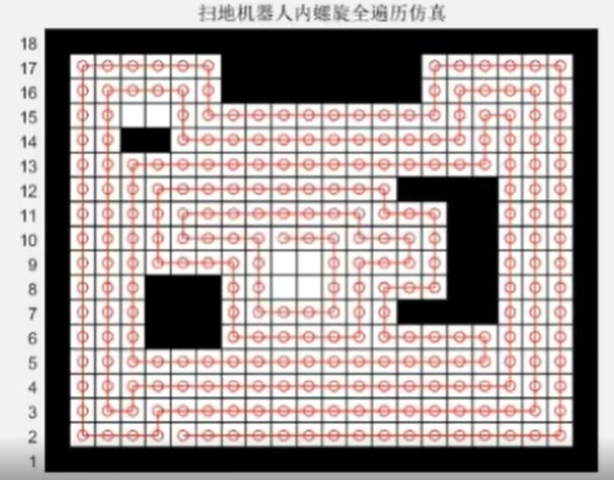
使用MATLAB实现扫地机器人路径规划的全覆盖内螺旋算法的代码示例。该算法的核心思想是让机器人从外向内以螺旋形路径覆盖整个区域。
MATLAB代码实现
% 全覆盖内螺旋算法 - 扫地机器人路径规划
% 假设清扫区域为矩形,起始点为左上角
function spiralCoverage()
% 定义清扫区域大小 (例如 10x10 的网格)
rows = 10; % 行数
cols = 10; % 列数
% 初始化地图 (0 表示未清扫,1 表示已清扫)
map = zeros(rows, cols);
% 起始位置
x = 1; % 当前横坐标
y = 1; % 当前纵坐标
% 定义方向向量 (右、下、左、上)
directions = [0, 1; 1, 0; 0, -1; -1, 0];
dirIndex = 1; % 当前方向索引
% 记录路径
path = [];
% 循环直到所有区域被清扫
while true
% 标记当前位置为已清扫
if map(x, y) == 0
map(x, y) = 1;
path = [path; x, y]; % 记录路径
end
% 检查下一步是否可以移动
nextX = x + directions(dirIndex, 1);
nextY = y + directions(dirIndex, 2);
% 如果下一步超出边界或已经清扫过,则转向
if nextX < 1 || nextX > rows || nextY < 1 || nextY > cols || map(nextX, nextY) == 1
dirIndex = mod(dirIndex, 4) + 1; % 转向下一个方向
nextX = x + directions(dirIndex, 1);
nextY = y + directions(dirIndex, 2);
end
% 如果转向后仍然无法移动,则结束
if nextX < 1 || nextX > rows || nextY < 1 || nextY > cols || map(nextX, nextY) == 1
break;
end
% 移动到下一步
x = nextX;
y = nextY;
end
% 显示清扫路径
disp('清扫路径:');
disp(path);
% 可视化清扫过程
figure;
imagesc(map);
colormap([0 0 0; 1 1 1]); % 未清扫区域为黑色,已清扫区域为白色
title('扫地机器人路径规划');
xlabel('列');
ylabel('行');
hold on;
% 绘制路径
plot(path(:, 2), path(:, 1), 'r-', 'LineWidth', 2); % 红色路径
plot(path(1, 2), path(1, 1), 'go', 'MarkerSize', 10, 'MarkerFaceColor', 'g'); % 起点
plot(path(end, 2), path(end, 1), 'bo', 'MarkerSize', 10, 'MarkerFaceColor', 'b'); % 终点
hold off;
end
—
代码说明
-
地图初始化:
- 使用二维矩阵
map表示清扫区域,0表示未清扫,1表示已清扫。
- 使用二维矩阵
-
方向控制:
- 使用
directions数组定义四个方向:右、下、左、上。 - 通过改变
dirIndex实现转向。
- 使用
-
路径记录:
- 每次清扫一个格子时,将当前位置
(x, y)记录到path中。
- 每次清扫一个格子时,将当前位置
-
结束条件:
- 当机器人无法向任何方向移动时(即周围所有格子都已清扫),算法结束。
-
可视化:
- 使用
imagesc函数绘制清扫区域。 - 使用
plot函数绘制清扫路径,并标记起点和终点。
- 使用
运行结果
运行上述代码后,会生成一个可视化的清扫路径图,显示机器人从起点开始的内螺旋清扫过程。
如果需要进一步调整区域大小或起始位置,可以修改 rows、cols 和初始位置 (x, y)。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









