






如何使用C++语言实现双目三维重建系统项目
双目标定,立体校正,双目测距,三维重建
该项目旨在了解三维重建流程:包括相机标定,立体匹配,深度计算等等
代码包含:
支持双USB连接线的双目摄像头
(如果是单USB连接线的双目摄像头(左右摄像头被拼接在同一个视频中显示,需要分成立体像对)
支持单目相机标定
支持双目相机标定,无需 Matlab标定
支持使用WLS滤波器对视差图进行滤波
支持双目测距,误差在lcm内(鼠标点击图像即可获得其深度距离)
支持Open3D和PCL点云显示
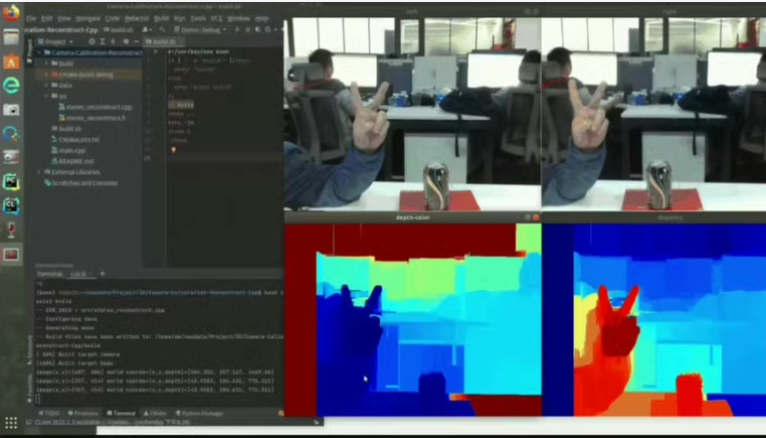
使用 C++ 实现双目三维重建系统项目
双目立体视觉(Stereo Vision)是一种通过两个摄像头从不同角度拍摄同一场景,利用视差信息来估计深度图并进行三维重建的技术。本项目将使用 C++ 和 OpenCV 库实现一个基础的双目三维重建系统。
🧠 一、基本原理
1. 双目标定(Stereo Calibration)
- 获取相机内参(焦距、畸变系数等)和外参(旋转和平移矩阵)。
- 计算本质矩阵(Essential Matrix)和基础矩阵(Fundamental Matrix)。
2. 立体校正(Rectification)
- 对左右图像进行透视变换,使图像行对齐,便于后续匹配。
3. 视差计算
- 使用 SGBM(Semi-Global Block Matching) 或 BM(Block Matching)算法计算视差图。
4. 深度重建
- 利用视差图和相机参数生成点云数据,实现三维空间重建。
🛠️ 二、开发环境要求
- 编程语言:C++
- 开发工具:Visual Studio / g++ / CLion
- 图像库:OpenCV(版本 >= 3.4)
—
📦 三、主要模块结构
stereo_reconstruction/
├── calibration/ # 标定文件
├── images/ # 左右图像
├── include/
│ └── stereo_utils.h # 头文件
├── src/
│ ├── main.cpp # 主程序入口
│ └── stereo_utils.cpp # 功能实现
├── CMakeLists.txt
└── README.md
📄 四、核心代码示例
1. stereo_utils.h —— 函数声明
#ifndef STEREO_UTILS_H
#define STEREO_UTILS_H
#include <opencv2/opencv.hpp>
void stereo_calibrate(const std::string& left_img_dir, const std::string& right_img_dir,
cv::Size board_size, float square_size,
cv::Mat& K1, cv::Mat& D1, cv::Mat& K2, cv::Mat& D2,
cv::Mat& R, cv::Mat& T, cv::Mat& E, cv::Mat& F);
void stereo_rectify(const cv::Mat& K1, const cv::Mat& D1, const cv::Mat& K2, const cv::Mat& D2,
const cv::Mat& R, const cv::Mat& T, cv::Size img_size,
cv::Mat& R1, cv::Mat& R2, cv::Mat& P1, cv::Mat& P2, cv::Mat& Q);
void compute_disparity(const cv::Mat& left, const cv::Mat& right,
cv::Mat& disparity, cv::Mat& coloredDisparity);
void reconstruct_3d(const cv::Mat& disparity, const cv::Mat& Q, cv::Mat& points_3d);
#endif // STEREO_UTILS_H
2. stereo_utils.cpp —— 功能实现
#include "stereo_utils.h"
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
void stereo_calibrate(const string& left_dir, const string& right_dir,
Size board_size, float square_size,
Mat& K1, Mat& D1, Mat& K2, Mat& D2,
Mat& R, Mat& T, Mat& E, Mat& F) {
vector<vector<Point3f>> object_points;
vector<vector<Point2f>> image_points1, image_points2;
for (int i = 0; i < 10; ++i) {
string left_path = left_dir + "/left_" + to_string(i) + ".jpg";
string right_path = right_dir + "/right_" + to_string(i) + ".jpg";
Mat img1 = imread(left_path, IMREAD_GRAYSCALE);
Mat img2 = imread(right_path, IMREAD_GRAYSCALE);
vector<Point2f> corners1, corners2;
bool found1 = findChessboardCorners(img1, board_size, corners1);
bool found2 = findChessboardCorners(img2, board_size, corners2);
if (found1 && found2) {
TermCriteria criteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.001);
cornerSubPix(img1, corners1, Size(5, 5), Size(-1, -1), criteria);
cornerSubPix(img2, corners2, Size(5, 5), Size(-1, -1), criteria);
image_points1.push_back(corners1);
image_points2.push_back(corners2);
vector<Point3f> obj;
for (int r = 0; r < board_size.height; ++r)
for (int c = 0; c < board_size.width; ++c)
obj.push_back(Point3f(float(c * square_size), float(r * square_size), 0));
object_points.push_back(obj);
}
}
stereoCalibrate(object_points, image_points1, image_points2,
K1, D1, K2, D2, Size(), R, T, E, F,
CALIB_FIX_INTRINSIC, TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 100, 1e-5));
cout << "R:\n" << R << "\nT:\n" << T << endl;
}
void stereo_rectify(const Mat& K1, const Mat& D1, const Mat& K2, const Mat& D2,
const Mat& R, const Mat& T, Size img_size,
Mat& R1, Mat& R2, Mat& P1, Mat& P2, Mat& Q) {
stereoRectify(K1, D1, K2, D2, img_size, R, T, R1, R2, P1, P2, Q);
}
void compute_disparity(const Mat& left, const Mat& right,
Mat& disparity, Mat& coloredDisparity) {
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0, 16, 3);
sgbm->setNumDisparities(16 * 5);
sgbm->setBlockSize(5);
sgbm->setP1(8 * 3 * 5 * 5);
sgbm->setP2(32 * 3 * 5 * 5);
sgbm->setMinDisparity(0);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(1);
sgbm->setMode(StereoSGBM::MODE_SGBM_3WAY);
Mat disp16S;
sgbm->compute(left, right, disp16S);
normalize(disp16S, disparity, 0, 255, NORM_MINMAX, CV_8U);
applyColorMap(disparity, coloredDisparity, COLORMAP_JET);
}
void reconstruct_3d(const Mat& disparity, const Mat& Q, Mat& points_3d) {
reprojectImageTo3D(disparity, points_3d, Q, true);
}
3. main.cpp —— 主函数逻辑
#include "stereo_utils.h"
int main() {
// 相机标定参数
Size board_size(9, 6); // 棋盘格角点数
float square_size = 25.0f; // 单位 mm
Mat K1 = Mat::eye(3, 3, CV_64F), D1 = Mat::zeros(8, 1, CV_64F);
Mat K2 = Mat::eye(3, 3, CV_64F), D2 = Mat::zeros(8, 1, CV_64F);
Mat R, T, E, F;
// 1. 双目标定
stereo_calibrate("calibration/left", "calibration/right",
board_size, square_size, K1, D1, K2, D2, R, T, E, F);
// 2. 立体校正参数
Mat R1, R2, P1, P2, Q;
stereo_rectify(K1, D1, K2, D2, R, T, Size(640, 480), R1, R2, P1, P2, Q);
// 3. 加载左右图像
Mat left = imread("images/left_0.jpg", IMREAD_GRAYSCALE);
Mat right = imread("images/right_0.jpg", IMREAD_GRAYSCALE);
// 4. 计算视差图
Mat disparity, coloredDisparity;
compute_disparity(left, right, disparity, coloredDisparity);
imshow("Disparity", coloredDisparity);
// 5. 三维重建
Mat points_3d;
reconstruct_3d(disparity, Q, points_3d);
waitKey(0);
return 0;
}
🧪 五、运行步骤
1. 准备标定图像
在 calibration/left 和 calibration/right 下准备至少 10 组对应的棋盘格图像。
2. 构建与编译(CMake 示例)
cmake_minimum_required(VERSION 3.10)
project(stereo_reconstruction)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(stereo_reconstruction src/main.cpp src/stereo_utils.cpp)
target_link_libraries(stereo_reconstruction ${OpenCV_LIBS})
3. 执行程序
mkdir build && cd build
cmake ..
make
./stereo_reconstruction
🎯 六、输出结果
- 显示视差图(彩色映射);
- 得到三维点云数据(可用于 PCL 显示或保存为
.ply文件); - 后续可结合 PCL(Point Cloud Library) 进行可视化。
🧩 七、扩展功能建议
- 使用 PCL 显示点云;
- 支持实时视频流输入(USB摄像头或ZED相机);
- 增加 GUI 界面(Qt / OpenCV HighGui);
- 使用 CUDA 加速视差计算;
- 添加特征匹配(ORB/SIFT)辅助稀疏点云提取;
- 支持多尺度重建、纹理映射。

















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









