






不少小伙伴都希望能将一些短视频平台上精彩的视频下载下来珍藏,但却不知如何操作。
今天给大家带来的这款工具,能够实现批量下载,简直是快乐翻倍。
DYD短视频无水印下载,聚合下载且无水印
这款软件无需安装,解压后找到主程序图标,点击即可启动。
若出现更新提示,暂且不要更新。
软件界面支持众多平台的下载,基本能满足日常需求。

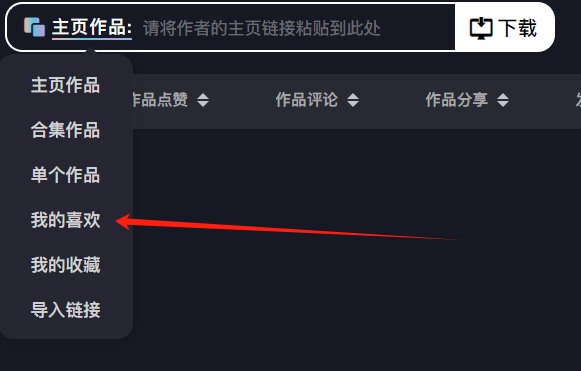
以抖音为例,进入使用界面后,可选择主页作品合集、单个作品,或喜欢及收藏的作品,一键抓取并批量下载,十分便捷。特别是针对“我的喜欢”进行下载,操作性极强。
建议大家登录账号,否则无法批量下载作品。
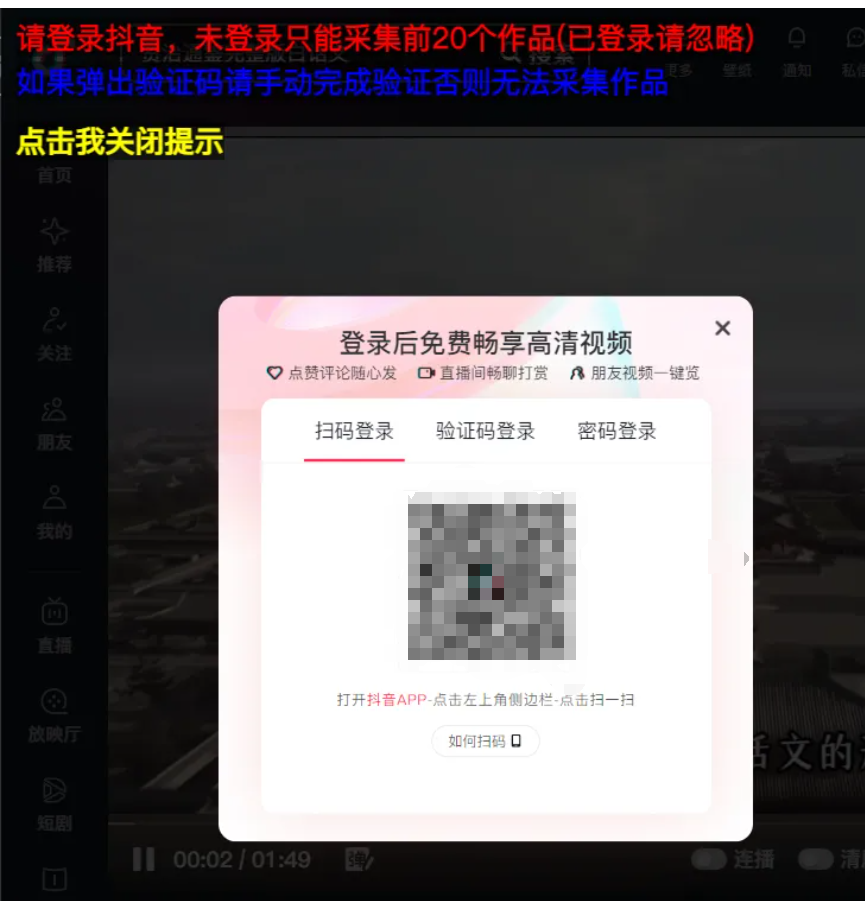
软件能迅速采集到视频信息,支持批量及单个下载。

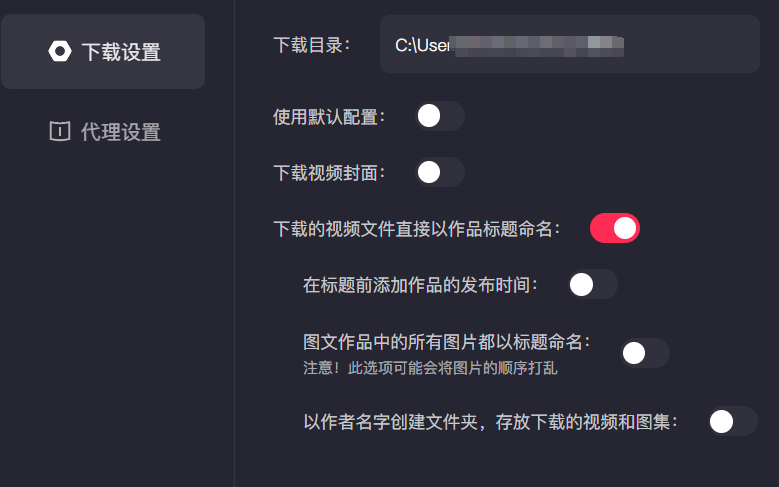
此外,软件还可自行设置,如下载目录、是否保存视频封面等。
这款软件整体使用方便,功能强大,小红书和快手的视频同样可以下载,这里就不一一演示了,有兴趣的朋友就抓紧试试吧!

















 1129
1129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









