







 本文介绍了超声三维重建技术中的两种主要算法:基于像素的三维重建算法(PBM)和基于体素的三维重建算法(VBM)。PBM通过像素分布和体素填补两个阶段将二维图像转换为三维数据,而VBM则遍历三维空间中的体素,寻找对应二维图像的像素值并进行插值。文中提到了多种插值方法,如最近邻、距离加权等,并讨论了不同方法对重建质量和速度的影响。
本文介绍了超声三维重建技术中的两种主要算法:基于像素的三维重建算法(PBM)和基于体素的三维重建算法(VBM)。PBM通过像素分布和体素填补两个阶段将二维图像转换为三维数据,而VBM则遍历三维空间中的体素,寻找对应二维图像的像素值并进行插值。文中提到了多种插值方法,如最近邻、距离加权等,并讨论了不同方法对重建质量和速度的影响。
超声三维重建算法
在三维超声弹性成像中,三维重建是将二维弹性图转化成三维超声弹性图的关键一步。三维重建算法按照其原理的不同可以分为三类:基于像素的三维重建算法(PBM)、基于体素的三维重建算法(VBM) 和基于函数的三维重建算法(FBM)。
阿远学长在今天给大家详细讲解一下关于基于像素的算法理论。
基于像素的算法(PBM)
基于像素的三维重建算法也被称为**“用像素找体素”**的方法,其基本流程包括两个阶段:像素分布和体素填补。
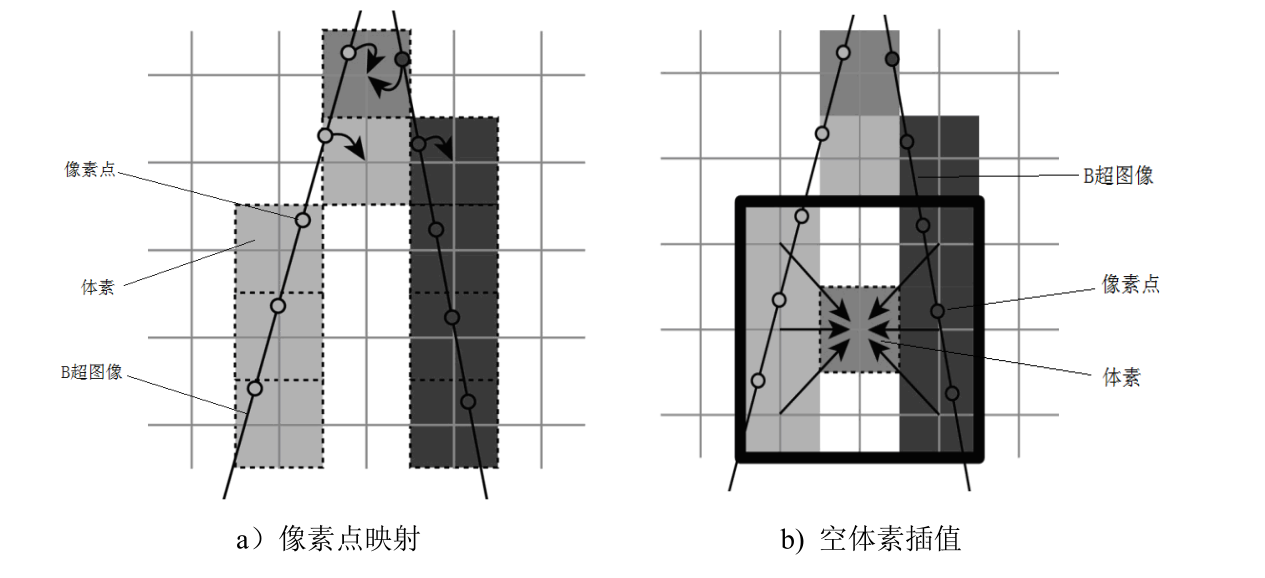
第一阶段是像素分布阶段,将二维图像序列上的像素点通过坐标转换映射到三维成像空间中的对应位置,并将该像素值赋值给体素;第二阶段是体素填补阶段,遍历三维成像空间中所有的体素,找出空体素,再通过插值算法来填补空体素。
在像素分布阶段,将原始的二维超声图像上的像素点通过坐标转换映射到三维成像空间中的对应位置,并将该像素值赋值给对应的体素。这个过程中,每个像素点都被转换到了三维空间中,它们的灰度值就相当于是对应位置的超声数据。
在体素填补阶段,会遍历标准网格中的每一个体素,如果当前体素是一个空体素,则搜索当前空体素的一定邻域范围,根据邻域内的体素计算当前空体素的灰度值。如果某个空体素的邻域范围内都没有出现非空体素,则保留当前空体素的值。这个过程中,对于没有被像素映射到的体素,会使用插值算法来填补缺失的灰度值,从而获得一个完整的三维超声图像。
通过这两个阶段的处理,像素分布阶段负责将二维超声图像转化为三维数据,而体素填补阶段则处理了三维数据中的空洞部分,最终生成了一个完整的三维超声图像。这种方法可以实现超声图像的三维重建,为医学诊断提供了可靠的图像基础。
PNN 算法是典型的 PBM 算法 ,如图所示.
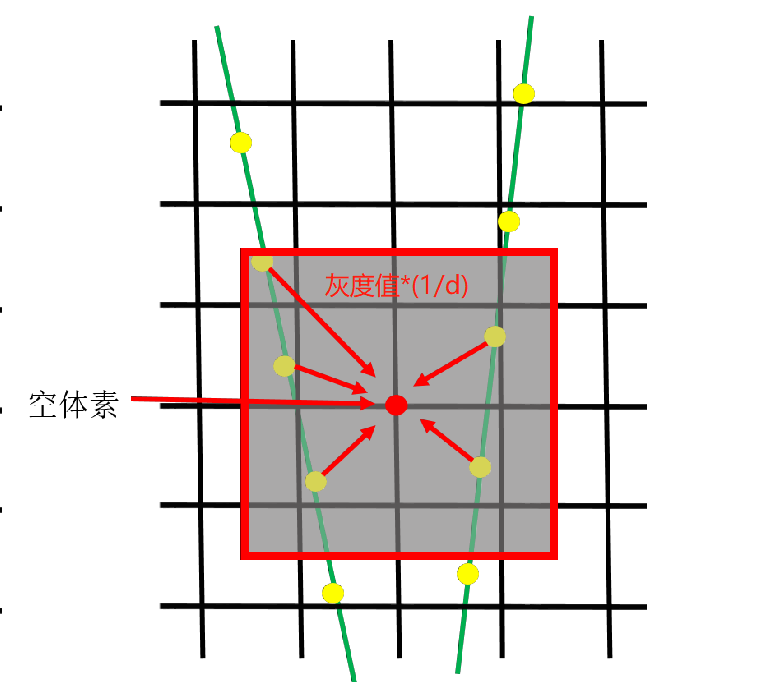
我们知道三维网格中体素大小是自定义的,当相邻两帧 B 超图像的间距大于单位体素大小时,三维网格中会存在一些空体素点。因此需要对这些灰度值为零的体素进行插值,常用的一种插值方法是根据最近邻的非空体素灰度值对当前体素进行赋值,这种办法简单而且直接,可以应用于一些对重建图像质量不高的临床应用中;还可以对空体素点邻域范围内的非空体素值求平均,这种方法需要搜寻三维邻域空间,数据计算量比较大,它所需要的插值计算时间根据我们选择的邻域范围大小而定,邻域范围比较大的话所需的时间就长,反之亦然;还有一种插值方法是根据当前体素两边最近的 B 超图像横断方向上的两个非空体素进行加权平均得到。不管是哪一种插值算法,都只是对空体素点灰度值的一种近似计算,因此多多少少会带来一些误差,有时候还会带来一些伪影,比如某个切平面上的体素中既有直接从二维超声图像直接映射得到的,也有通过邻域体素求平均计算得来的,这种情况下,体素与体素之间就会出现明显的分界线。
常用的空体素插值方法有两种,第一种是将二维超声图像序列中的每一个像素点映射到三维空间中的某个体素,然后遍历三维体素阵列,若遇到某一个体素为空值,则搜索其3×3×3 邻域内的所有体素点,若其中有一半体素的灰度值非空,则将这些体素求平均值或者中值赋给当前空体素点,否则向外扩展邻域空间范围到 5×5×5 大小,若其中有一半体素的灰度值非空,则使用如上方法计算空体素的灰度值,否则设置该体素的灰度值为零。
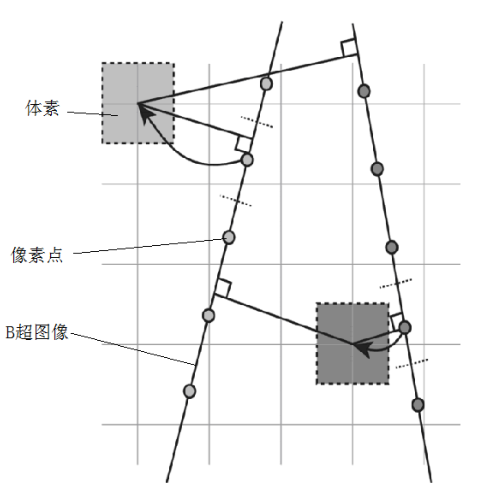
第二种是将二维超声图像序列中的每一个像素点映射到三维空间上的体素中,遍历体素阵列,如果体素灰度值不为零,则遍历该体素的某个邻域范围内的所有体素,计算邻域体素与该体素的距离,将距离的倒数作为权值乘以该体素灰度值赋给邻域内的体素点,若邻域体素非空,则累加该体素的灰度值和权值,当遍历完整个三维网格,求每一个体素的平均灰度值,即为插值计算的体素灰度值。
基于体素的三维重建算法
基于体素的三维重建算法也被称为**“用体素找像素”**,其基本思想是遍历三维成像空间中每个体素,根据体素的位置找出二维图像序列中对应的像素值(一个或多个)。
然后再按照一定的插值算法,将像素值赋值给体素。
该算法遍历一个预先定义好的三维标准晶格(比如一个三维空间长方体)中的每一个体素(长方体内部的小体积),根据不同的计算方法,可以分为基于体素的赋值方法和基于体素的插值方法。
基于体素的赋值方法在体素附近搜索一个相关像素点,将该像素点的像素值赋给当前体素;
而基于体素的插值算法则在体素邻域内搜索多个像素点,并使用一些插值公式计算当前体素的值。
基于体素的赋值算法会依次遍历预先定义好的三维标准晶格中的每一个体素,在体素邻域范围内搜索一个相关像素点,并将该像素点的值赋给当前体素。
这种算法主要有:VNN 算法,它是经典的 VBM 算法之一,如图所示,VNN遍历三维网格中的每一个体素,将距离体素最近的像素点的灰度值赋给该体素。
基于体素的插值算法搜索三维体积阵列中的每一个体素的邻域范围,将邻域内的多个相关像素点通过某种插值计算得出当前体素的灰度值。
针对超声图像特点,目前使用较多的插值算法有:线性插值算法(LI)、距离加权算法(DW)、中值滤波算法(MF)和轨迹跟踪算法(PT)。
本节主要对距离加权算法(DW)进行叙述:
距离加权(DW)算法是经典的 VBM 算法之一。该算法遍历三维成像空间中每个体素,体素的灰度值由其周边邻域的所有像素值加权平均计算而得,加权系数为像素与体素距离的倒数。
数学表达式为:
I ( V c ) = ∑ k = 1 n W k I ( V p k ) ∑ k = 1 n W k I(V_c)=\frac{\sum\limits_{k=1}^n W_k I(V_p^k)}{\sum\limits_{k=1}^n W_k} I(Vc)=
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 646
646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









