






横列式双旋翼两轴飞行器倾转旋翼simulink
simscape仿真MATLAB 内环 外环pid控制
YID:89249668568032359
爱小马的海盐大傻
横列式双旋翼两轴飞行器倾转旋翼是一种具有高度灵活性和操控性的飞行器。在现代飞行器设计中,倾转旋翼系统已被广泛应用于无人机、直升机等垂直起降飞行器。本文将以横列式双旋翼两轴飞行器倾转旋翼为研究对象,探讨基于Simulink和Simscape仿真环境的MATLAB实现,并结合内环和外环PID控制以及LADRC和ADRC控制算法,对其进行性能分析。
-
引言
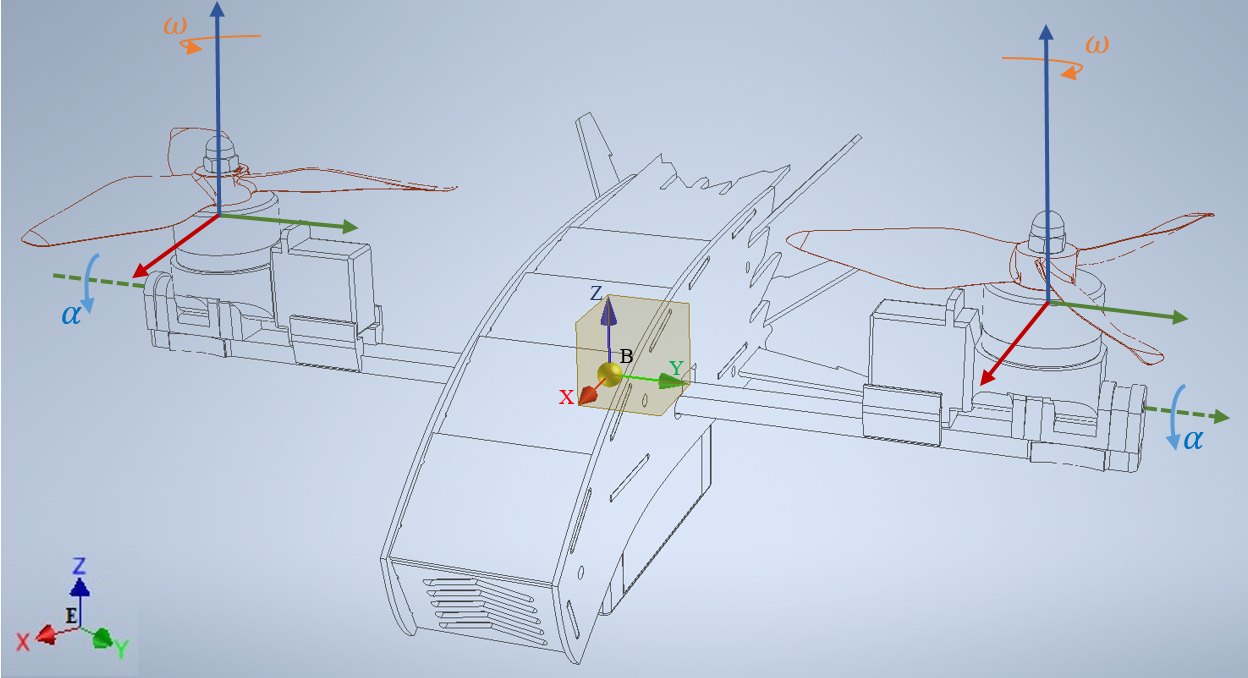
横列式双旋翼两轴飞行器是一种采用双旋翼布局的飞行器,通过倾转旋翼的方式实现悬停、平稳飞行以及快速机动等功能。该飞行器具有较高的操控性能和适应性,因此在无人机、直升机等领域得到广泛应用。本文将以该飞行器为研究对象,基于Simulink和Simscape仿真环境,探讨其控制算法和性能优化问题。 -
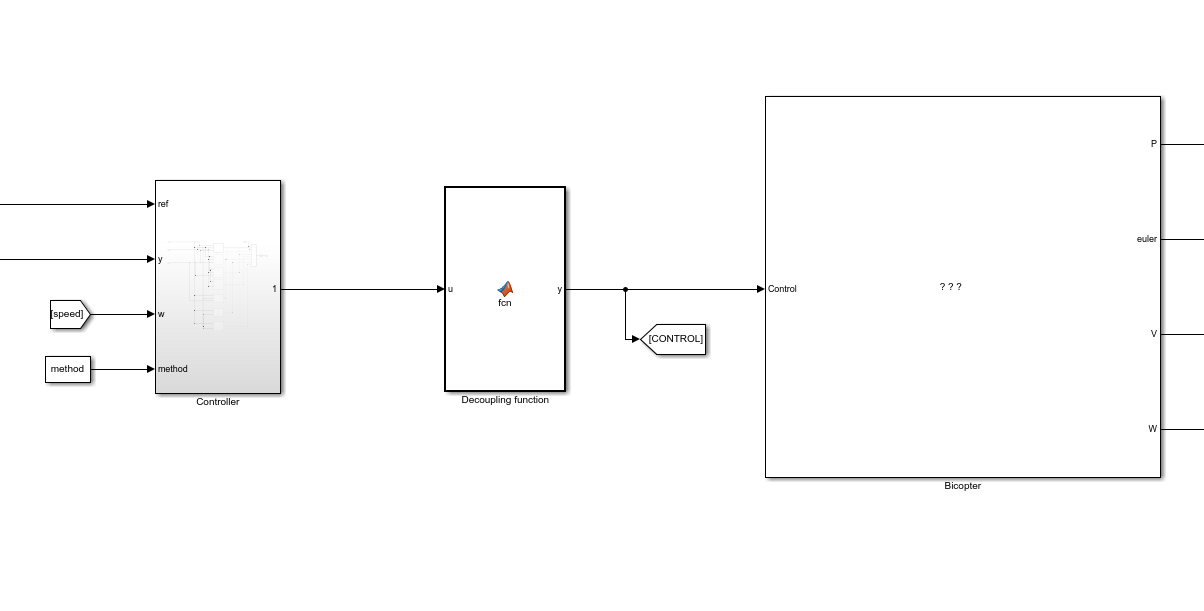
飞行器建模
在飞行器建模中,Simulink和Simscape提供了丰富的工具和模块,可以方便地进行飞行器系统建模和仿真。首先,我们需要对飞行器的物理特性进行建模,包括质量、惯性矩阵、气动力学参数等。然后,利用Simscape中的旋翼和传感器等模块搭建飞行器的仿真模型。最后,通过Simulink搭建控制系统,包括内环和外环PID控制以及LADRC和ADRC控制算法。 -
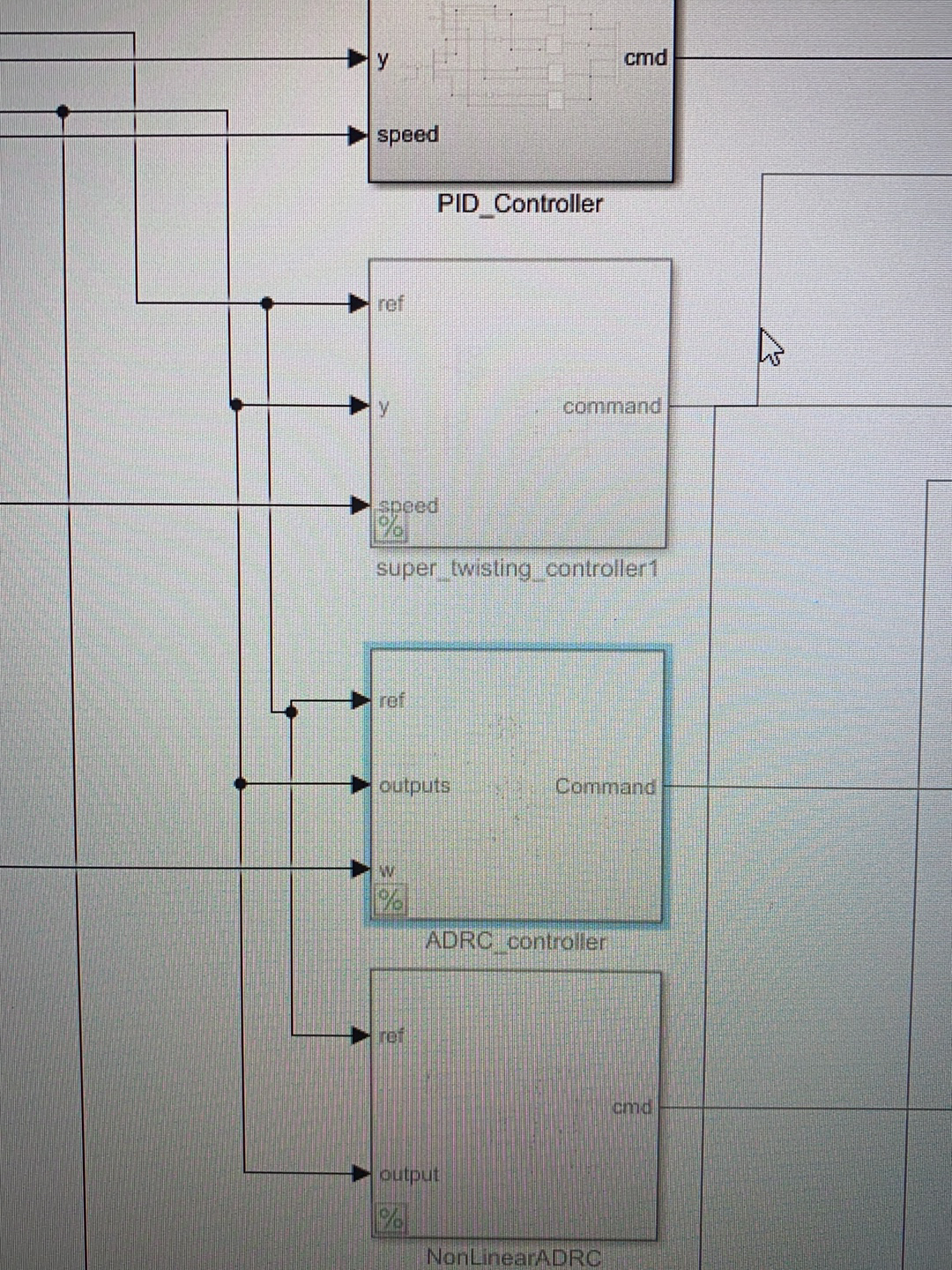
PID控制算法
PID控制是一种常见的控制算法,通过调节比例、积分和微分参数,实现对飞行器姿态和位置的控制。在横列式双旋翼两轴飞行器控制中,内环PID控制主要用于旋翼的姿态控制,外环PID控制用于飞行器的位置控制。通过调节PID参数,可以实现良好的稳定性和响应速度。 -
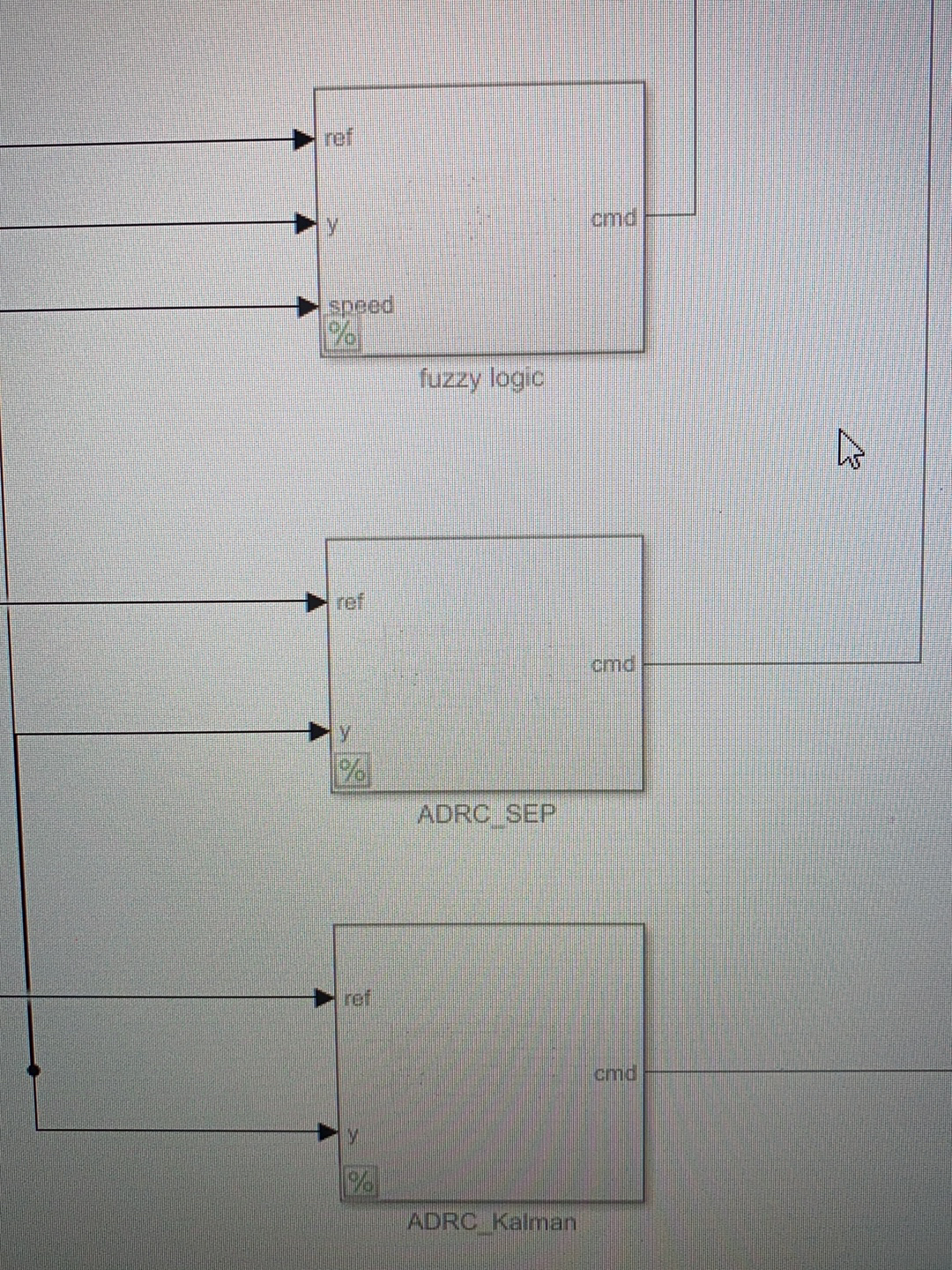
LADRC控制算法
LADRC(Load Adaptive Disturbance Rejection Control)是一种抗负载干扰控制算法,通过估计
相关代码,程序地址:http://lanzoup.cn/668568032359.html















 672
672











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









