









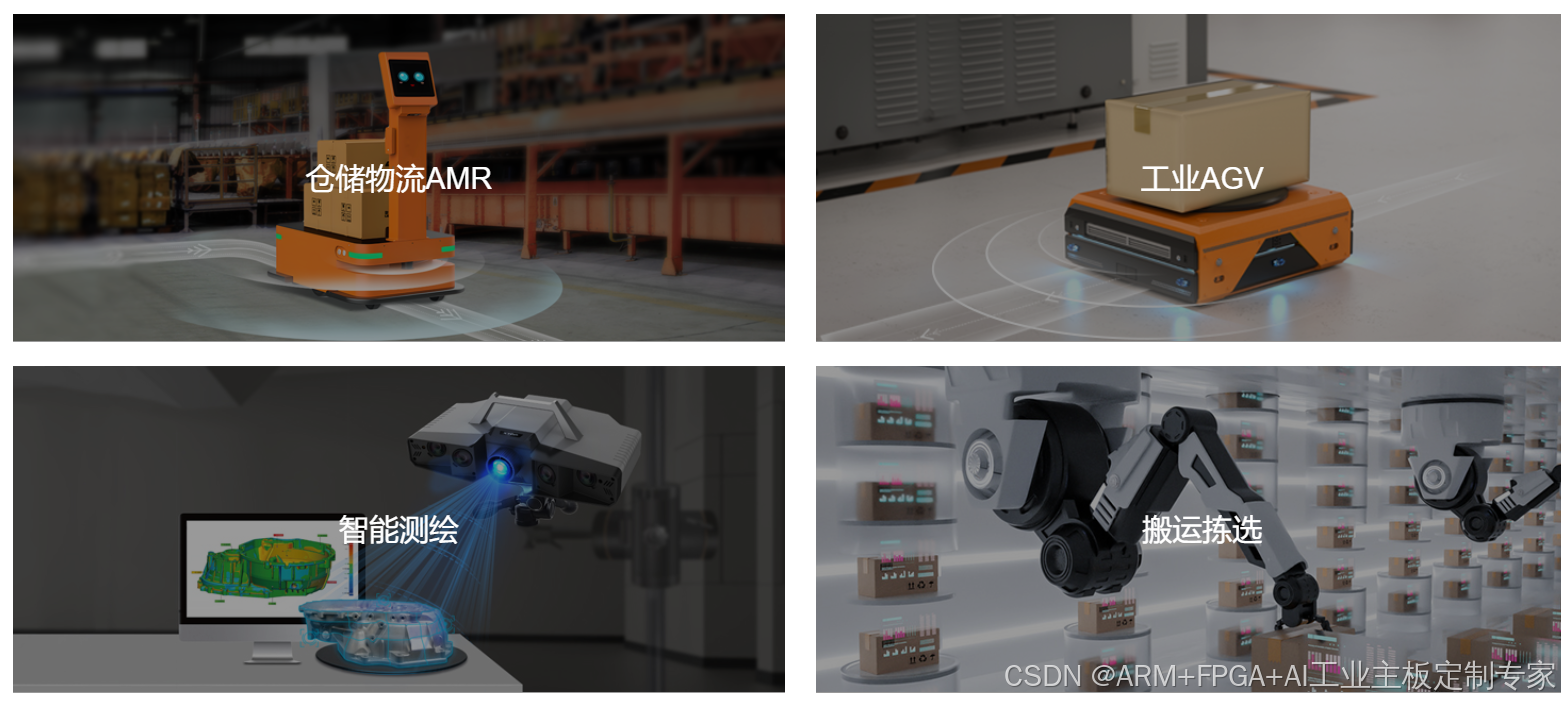
基于RK3588工业机器人解决方案
针对工业机器人场景,基于3D视觉感知技术,采用dToF激光雷达实现目标及环境深度信息的获取与输出,助力工业机器人实现运动避障、抓取规划、机器人配合等功能,可应用于货品周转搬运、拣选上料、装配、涂胶、检测等工业、物流业场景,目前已服务斯坦德、劢微、仙工等多家工业机器人头部厂商。
工业机器人控制板需要哪些特点呢?
智能机器人控制板作为机器人的核心大脑,需要具备一系列关键特点以支撑其高效、智能地运作。以下是智能机器人控制板所需的主要特点:
NPU加持
-
支持离线大模型:能够处理复杂的AI任务,即使在网络不稳定或离线状态下也能运行大型神经网络模型。
-
物体识别等算法:内置或可加载多种物体识别、人脸识别、场景理解等算法,提升机器人的感知能力。
-
单目测距算法:支持通过单目摄像头进行距离测量,增强机器人的空间感知能力。
-
算力灵活叠加:提供灵活的算力扩展能力,根据任务需求调整NPU的算力资源。
操作系统支持
-
支持Linux安卓系统:提供对Linux和Android操作系统的广泛支持,便于开发者选择适合的操作系统进行开发。
-
Android友好设计UI:对于采用Android系统的机器人,提供用户友好的界面设计工具和框架。
-
Linux标准适配ROS/ROS2:完美适配ROS(Robot Operating System)和ROS2,为机器人应用开发提供强大的生态系统支持。
智能语音交互
-
多麦克风阵列:配置多个麦克风阵列,提高语音采集的清晰度和方向性。
-
离线语音唤醒词:支持离线语音唤醒功能,即使在无网络环境下也能通过特定唤醒词激活机器人。
AMP架构支持
-
强实时性:确保机器人控制板在处理关键任务时具有极高的响应速度和实时性。
-
高稳定性:采用稳定的硬件和软件架构设计,降低系统故障率,提升机器人运行的可靠性。
-
更低的硬件成本:通过优化AMP(Asymmetric Multiprocessing,非对称多处理)架构,实现性能与成本的平衡。
ROS适配
-
适配标准ROS/ROS2:无缝集成ROS和ROS2,使机器人能够轻松接入机器人生态系统中的各类库、工具和应用程序。
-
适配部分雷达:支持多种雷达传感器(如激光雷达、毫米波雷达等),提升机器人在复杂环境中的感知能力。
-
适配RK结构光:与瑞芯微自研的结构光模组高度兼容,实现更精准的3D感知和测量。
RK3588在机器人控制板上的优势
-
高CPU算力:高达93KDMIPS的CPU算力,为机器人控制板提供强大的数据处理能力,确保机器人能够迅速响应各种指令和任务。
-
高GPU算力:高达512GFLOPs的GPU算力,支持复杂的图形渲染和多媒体处理,提升机器人的视觉感知和交互体验。
-
高NPU算力:三核NPU,算力高达6TOPs(INT8),支持深度学习框架,为机器人控制板上的AI应用提供高效、精准的算力支持。例如,在yolo-v8n模型下,单核即可达到59.6fps的推理速度,满足实时性要求高的应用场景。
-
瑞芯微自研模组:瑞芯微自研的结构光模组和RK1808计算棒等模组,为机器人控制板提供了更加专业的硬件支持,提升了机器人的整体性能和功能。
-
工规芯片标准:支持-40摄氏度到85摄氏度的宽温工作环境,确保机器人在各种恶劣环境下都能稳定运行。
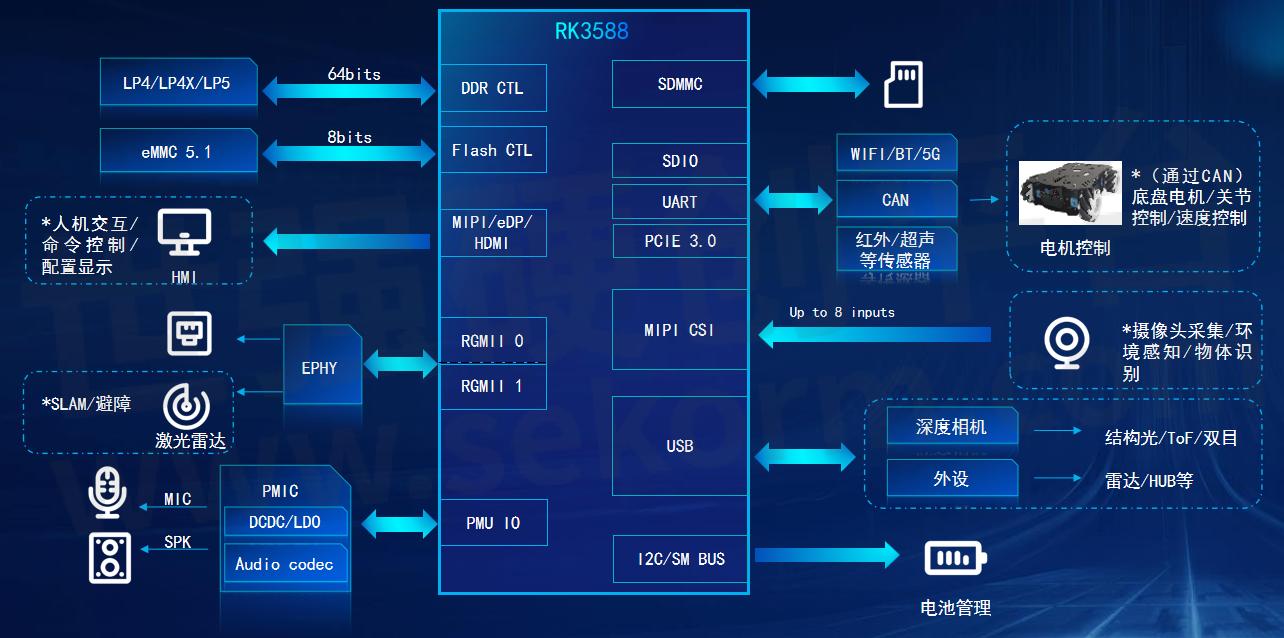
基于RK3588的机器人控制板设计方案框图
-
RK3588作为控制板的中央处理器,通过其内部的多核CPU、GPU和NPU处理各种计算任务。
-
LP4/LP4X/LP5 DDR CTL提供高速动态随机存取内存(DRAM),支持RK3588的数据处理需求。
-
eMMC 5.1 Flash用于存储操作系统、应用程序及用户数据,提供持久化存储能力。
-
HDMI/eDP接口连接至高清显示屏,实现人机交互和命令控制的可视化界面。
-
MIPI CSI支持最多8个摄像头输入,用于环境感知、物体识别等功能。
-
RGMII 0/RGMII 1可实现Ethernet网口连接,或连接激光雷达等传感器,支持SLAM(即时定位与地图构建)和避障功能。
-
PMU IO接入电源管理集成电路(PMIC)、DC-DC转换器、低压差线性稳压器(LDO)等,为系统提供稳定的电源供应。同时,支持音频编解码器(Audio Codec)的接入,以连接麦克风(MIC)或扬声器(SPK)。
-
SDMMC提供SD/MMC卡插槽,用于扩展存储空间或数据备份。
-
SDIO/UART/PCIE 3.0支持通过这些接口开发或连接WiFi模块、蓝牙模块、5G模块等,实现无线通信功能。同时,支持CAN接口的开发,用于电机控制等。
-
USB端口用于连接深度相机(如结构光相机、ToF相机、双目相机)、雷达等外设,以及USB HUB以扩展更多USB设备。
-
I2C/SMBus用于连接温度传感器、电池管理单元(BMU)等,实现电池健康监测和温度控制等功能。
-
CAN口直接或通过CAN控制器接入,实现对机器人底盘电机、关节控制、速度控制等精确控制。
-
红外/超声传感器接口:通过GPIO或其他专用接口连接红外或超声波传感器,用于近距离检测或避障。


















 924
924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









