







 本文探讨了如何利用深度学习技术开发流动摊贩检测系统,涉及目标检测算法(如多层感知机和YOLO)、注意力机制的应用、数据处理策略以及模型在实验环境中的训练和结果分析。通过结合卷积神经网络和注意力机制,系统旨在提升城市管理部门的监管效率。
本文探讨了如何利用深度学习技术开发流动摊贩检测系统,涉及目标检测算法(如多层感知机和YOLO)、注意力机制的应用、数据处理策略以及模型在实验环境中的训练和结果分析。通过结合卷积神经网络和注意力机制,系统旨在提升城市管理部门的监管效率。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的流动摊贩检测系统
一、课题背景与意义
在城市化进程加速的背景下,流动摊贩作为一种重要的商业形态,对城市经济和社会生活具有重要影响。然而,流动摊贩的管理和监管面临着诸多挑战,如规模庞大、难以监测和管理等。因此,借助计算机视觉和深度学习技术,开发一种流动摊贩检测系统,可以实时识别和追踪流动摊贩的位置和活动,为城市管理部门提供有效的监管手段,提升城市治理和服务水平。
二、算法理论技术
2.1 目标检测算法
多层感知机通过非线性建模能力、特征提取和转换能力,以及可扩展性和高效性等特点,为流动摊贩检测系统提供了强大的工具和方法。它能够准确捕捉复杂的非线性关系,提取具有区分性的特征表示,并适应不同的任务需求和数据特点。通过多层感知机,可以实现流动摊贩位置的识别和跟踪、行为分析、摊位布局优化等功能,为城市管理部门提供精细化和智能化的监管手段,推动城市治理水平的提升。
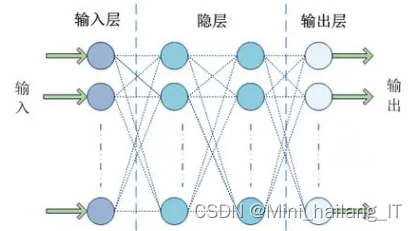
多层感知机是一种常用的神经网络模型,其结构基本由输入层、隐层和输出层组成。输入层的神经元个数决定了特征的维度,隐层可以包含多个神经元,用于将输入特征转换为输出特征,而输出层的神经元个数则决定了模型的输出特征的维度。多层感知机通过逐层传递信息和使用非线性激活函数,可以学习和表示更复杂的非线性关系,因此在许多机器学习任务中表现出色。通过增加隐层的神经元数量和层数,多层感知机可以提高模型的表示能力和学习能力,从而更好地适应复杂的数据分布和任务要求。
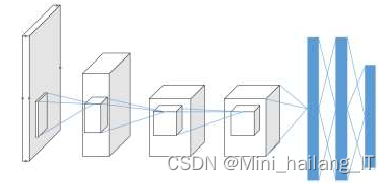
卷积神经网络(CNN)是一种由卷积、激活和池化三部分组成的深度学习模型。其训练过程可以大致分为以下3步:首先将输入图片通过卷积操作得到特定的特征图,然后使用全连接层将特征图转换为最终的输出结果。这是卷积神经网络的前向传播过程。然而,在处理图像时,最重要的工作是后向传播,即通过多次训练相同的数据集来调整网络权重,从而拟合出适应特定任务的特征函数。通过后向传播,CNN可以学习到图像的抽象特征和模式,从而在图像分类、目标检测等任务中取得优秀的性能。
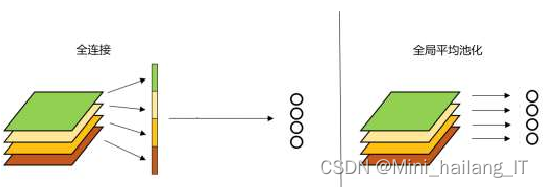
经过一系列的卷积和池化等操作后得到的特征图包含了分散的特征信息。为了将这些特征信息整合并与样本的标记进行比较,通常会使用全连接层。然而,全连接层的参数数量庞大,导致计算复杂度高。因此,一些网络采用了全局平均池化的方法来替代全连接层,以减少参数量并获得良好的预测性能。全局平均池化操作将特征图的每个通道的特征值取平均,得到一个标量作为该通道的汇总特征,从而实现特征的整合。这种方法不仅减少了网络的参数量和计算量,还能够保留重要的特征信息,提高模型的泛化能力。
YOLO系列算法将目标检测任务视为一个回归网络,直接回归出目标的位置和参数,因此具有极快的检测速度,可以达到每秒45帧的实时性能,相比其他检测算法的速度更快,具有显著的优势。在YOLO算法提出后,作者不断改进和优化,逐步发展出一系列优秀的单阶段目标检测算法。
相对于Fast R-CNN等方法,YOLO在背景类别的检测精度上更高,能够更好地筛选出不存在目标的区域,从而提升检测效果。YOLO算法能够对整张特征图进行预测,与RCNN等方法的局部预测方式有所不同。YOLO的整体流程是将输入图像通过特征提取网络,生成相应的特征图,然后通过全连接层进行预测,得到目标的类别和置信度。YOLO的特征提取网络采用类似GoogleNet模型的结构,通过多次卷积和全连接操作来提取特征。
代码如下(示例):
def conv_block(in_channels, out_channels, kernel_size, stride, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.BatchNorm2d(out_channels),
nn.LeakyReLU(0.1)
)
class FeatureExtractor(nn.Module):
def __init__(self):
super(FeatureExtractor, self).__init__()
self.conv1 = conv_block(3, 16, 3, 1, 1)
self.maxpool1 = nn.MaxPool2d(2, 2)
self.conv2 = conv_block(16, 32, 3, 1, 1)
self.maxpool2 = nn.MaxPool2d(2, 2)
self.conv3 = conv_block(32, 64, 3, 1, 1)
self.maxpool3 = nn.MaxPool2d(2, 2)
self.conv4 = conv_block(64, 128, 3, 1, 1)
self.maxpool4 = nn.MaxPool2d(2, 2)
self.conv5 = conv_block(128, 256, 3, 1, 1)
self.maxpool5 = nn.MaxPool2d(2, 2)
self.conv6 = conv_block(256, 512, 3, 1, 1)
self.maxpool6 = nn.MaxPool2d(2, 1, 1)
def forward(self, x):
x = self.conv1(x)
x = self.maxpool1(x)
x = self.conv2(x)
x = self.maxpool2(x)
x = self.conv3(x)
x = self.maxpool3(x)
x = self.conv4(x)
x = self.maxpool4(x)
x = self.conv5(x)
x = self.maxpool5(x)
x = self.conv6(x)
x = self.maxpool6(x)
return x2.2 注意力机制
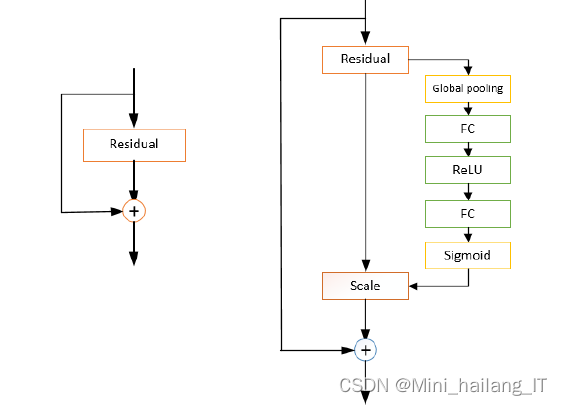
注意力机制在目标检测任务中发挥着重要的作用。在复杂的实际场景中,如流动摊贩检测,周边环境的复杂性和噪声会对检测效果产生影响。尽管使用残差网络作为主干网络已经在一定程度上提高了模型的检测效果,但仅依靠残差网络的识别能力仍然有限。因此,引入注意力机制可以有效应对这些问题。注意力机制能够忽略噪声元素,减少噪声的权重,并帮助模型获取图像中最具有贡献的特征信息,从而获得更具表达力的语义信息,提高整个模型的拟合能力。
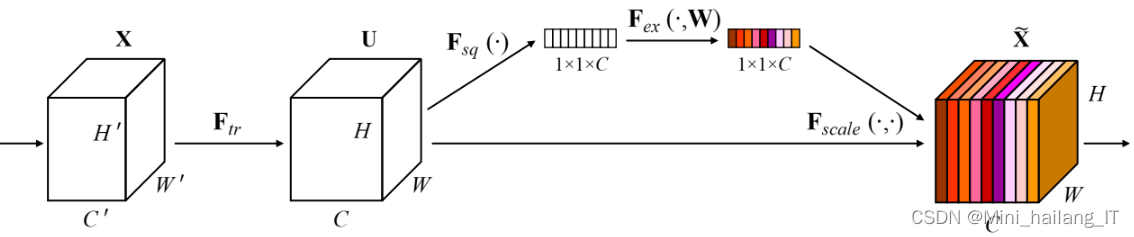
引入了SENet算法中的SE块。SE块由压缩和激励两个步骤组成。在压缩步骤中,通道信息被压缩为一个通道描述符,以减少计算量。然后,在激励步骤中,学习各个通道之间的关系,并将结果作为每个通道的权重进行加权计算。这样,通过SE块的引入,模型可以自动学习到每个通道对目标检测的重要性,并更加准确地分配特征的权重。
在使用残差网络作为特征提取网络的主要模块时,可以通过在残差块中添加SE模块来引入注意力机制。这可以通过在残差模块中添加SE模块的分支来实现。具体而言,将SE模块与残差模块串联起来,并将SE模块的输出结果与残差模块最后的特征图的每个通道进行加权运算。通过这种方法,SE模块可以在残差块内部对特征进行压缩和激励操作,学习到各个通道之间的关系,并根据通道的重要性为每个通道分配权重。然后,将得到的权重与残差模块最后的特征图进行加权运算,以获得加权后的特征表示。
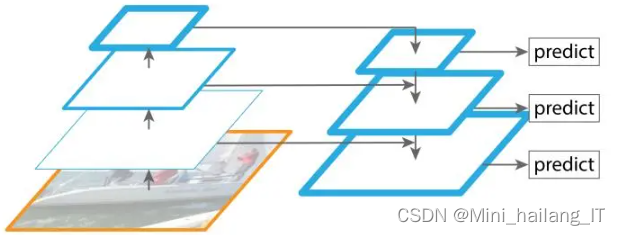
特征金字塔网络(FPN)通过自顶向下的方式对不同层次的特征图进行融合。由于低层特征拥有更多的像素信息但缺乏语义信息,其目标识别效果较差。因此,FPN将高层特征图与低层特征图进行融合,以确保低层特征图具有足够的语义信息,从而增强物体的识别效果。具体实现方式是将高层特征图进行上采样以改变其图像大小,同时对低层特征图进行1×1的卷积以改变其通道数,然后将两个特征图进行相加,得到新的特征图。这样的特征融合过程弥补了网络的定位能力,为后续的网络预测提供了更有效的特征输入,从而提高了目标检测的效果。
代码如下(示例):
class FeaturePyramidNetwork(nn.Module):
def __init__(self, in_channels_list, out_channels):
super(FeaturePyramidNetwork, self).__init__()
self.inner_blocks = nn.ModuleList()
self.layer_blocks = nn.ModuleList()
for in_channels in in_channels_list:
self.inner_blocks.append(nn.Conv2d(in_channels, out_channels, kernel_size=1))
for _ in range(len(in_channels_list) - 1):
self.layer_blocks.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
def forward(self, input_features):
pyramid_features = []
last_inner = self.inner_blocks[-1](input_features[-1])
pyramid_features.append(last_inner)
for idx in range(len(input_features) - 2, -1, -1):
inner_features = self.inner_blocks[idx](input_features[idx])
upsampled_features = nn.functional.interpolate(last_inner, scale_factor=2, mode='nearest')
fused_features = inner_features + upsampled_features
pyramid_features.insert(0, fused_features)
last_inner = fused_features三、模型训练
3.1 数据处理
通过网络爬取相关的图片和视频数据,我收集了大量真实场景下的流动摊贩活动图像,包括不同角度、光照条件和背景干扰等多样性。这个自制数据集为流动摊贩检测系统的训练和评估提供了有力的支持,确保系统在各种实际场景下具有准确性和鲁棒性。为了降低标注难度,针对流动摊贩的多样性,可以将标注重点放在对流动摊贩本身进行标注。这包括标注摊贩的出现位置、身份特征以及流动摊贩的活动行为等。同时,可以将物品和工具的标注作为辅助信息,使其成为可选的标注项,而非必要的标注内容。这样可以有效减少标注的复杂度,使标注过程更加简化和高效。
3.2 实验环境
实验使用了NVIDIA GeForce GTX 1080Ti显卡,并使用了PyTorch 深度学习框架和Python 编程语言。由于数据集大小有限,为了保证模型能够更好地收敛并节约训练时间,采用了迁移学习与模型微调的方法对模型进行训练。
3.3 结果分析
在训练过程中,首先从网络上下载了相应的预训练权重。这些预训练权重可以是在大规模数据集上预训练得到的模型参数,具有良好的特征提取能力。然后,将下载的预训练权重作为初始参数,在数据集上重新进行训练。通过在数据集上进行训练,模型可以根据具体任务的特点和数据集的特征进行调整和优化。最后,在相应的数据集上进行测试,评估模型在未见过的数据上的性能表现。

















 439
439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









