







 本文介绍了一种基于机器学习的指针仪表盘识别系统,通过网络爬虫获取并处理数据,使用CNN和ResNet进行特征提取,结合SSD和语义分割技术进行目标检测与指针识别,同时涉及几何校正和PCA方法。作者提供了项目背景、数据集创建、设计思路和相关代码示例,旨在帮助大学生高效完成毕业设计。
本文介绍了一种基于机器学习的指针仪表盘识别系统,通过网络爬虫获取并处理数据,使用CNN和ResNet进行特征提取,结合SSD和语义分割技术进行目标检测与指针识别,同时涉及几何校正和PCA方法。作者提供了项目背景、数据集创建、设计思路和相关代码示例,旨在帮助大学生高效完成毕业设计。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
大家好,这里是海浪学长计算机毕设专题,本次分享的课题是
🎯基于机器学习的指针仪表盘识别系统
项目背景
在工业和交通领域,指针仪表盘广泛应用于监测和控制系统,例如汽车仪表盘、工业仪表、航空仪表等。传统的指针仪表盘读数通常需要人工观察和解读,存在主观性和误读的可能性。基于机器学习的指针仪表盘识别系统可以通过分析仪表盘图像特征和使用训练好的模型,自动准确地读取指针位置和数值信息。这种系统可以提高工作效率、减少人为错误,并具有广泛的应用前景。因此,开发基于机器学习的指针仪表盘识别系统对于工业自动化和交通领域具有重要的实际意义和应用价值。
数据集
由于网络上缺乏现有适用于基于机器学习的指针仪表盘识别系统的数据集,我决定利用网络爬虫技术进行数据采集,并创建了一个全新的数据集。通过爬取工业设备和交通工具相关网站的指针仪表盘图像,我收集了大量真实的仪表盘图像数据。这个数据集包含了不同类型和不同角度下的指针仪表盘图像,以及其相应的标签信息。通过网络爬取和数据清洗,我能够获取到真实的仪表盘样本,这将为我的研究提供更准确、可靠的数据基础。

通过图像处理和增强技术,我对原始数据集进行了多样性增强和扩充。具体而言,我应用了数据增强方法,如旋转、平移、缩放和镜像等,以生成更多的样本变体。此外,我还使用了噪声添加和模糊处理等技术来模拟不同环境下的图像变化和噪声干扰。通过数据扩充,我能够获得更丰富的样本集,从而提高了系统对于不同仪表盘类型和环境条件的适应能力。
设计思路
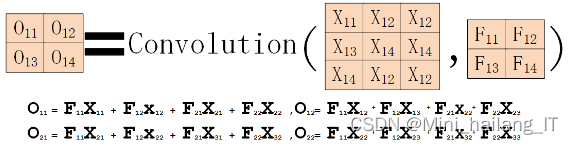
卷积神经网络(CNN)是一种具有深度结构的前馈神经网络,其特点是包含卷积计算并以二维矩阵的形式处理数据。相比传统的全连接神经网络,CNN通过将图像转换为二维矩阵格式的数据输入,能够全面、立体、细致地提取图像数据中的特征值。CNN与普通神经网络的主要结构差异在于引入了卷积层和子采样层作为特征抽取器。在卷积层中,每个神经元只与部分邻层神经元连接。一个卷积层通常包含多个特征平面,每个特征平面由排列的神经元组成,同一特征平面的神经元共享权值,即共享卷积核。卷积核会在训练过程中通过学习得到合理的权值。共享卷积核和减少连接数量的优势使得网络各层之间的连接减少,降低过拟合的风险。池化操作(也称为子采样)是一种特殊的非线性卷积过程。卷积操作和池化操作在很大程度上简化了模型的复杂度和参数数量。池化操作通过进一步减少数据维度,提取主要特征并保留空间信息。

卷积神经网络(CNN)包含了输入层、卷积层和池化层等组成部分。输入层接收图像的像素矩阵作为输入,矩阵的长、宽代表图像的大小,深度表示图像的色彩通道。卷积层通过局部连接和权值共享的方式,将上一层的多维矩阵转化为下一层的多维矩阵,以提取更深入、抽象的特征表达。池化层则用于缩小矩阵的大小,而不改变深度,通过降低分辨率来减少全连接层的输入数据量,从而减少训练参数。
残差网络基础模块是指ResNet中的残差块,它是ResNet网络结构的基本构建单元。残差块的设计旨在解决深度神经网络中的梯度消失和表达能力不足的问题。残差块通过引入跳跃连接来实现残差学习。跳跃连接将输入特征与输出特征直接相加,使得网络可以学习残差而不是直接学习映射。这样,网络可以轻松地学习到恒等映射,即将输入直接传递到下一层,或者学习到更复杂的映射,通过残差进行增量学习。通过堆叠多个残差块,可以构建深度的ResNet网络。在每个残差块中,输入特征沿着主路径(主要卷积分支)进行前向传播,同时通过跳跃连接直接传递到输出。这种设计使得网络可以轻松地学习到残差,有效解决了深度网络中的梯度消失问题,使得网络训练更加稳定和高效。

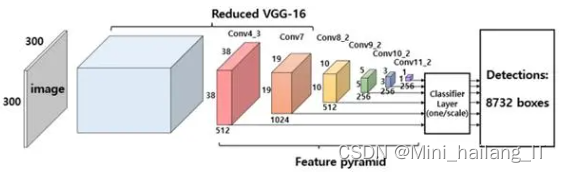
基于回归的目标检测算法,如SSD和YOLO系列,利用特征提取器(如CNN、ResNet50)进行特征提取。通过深层网络中的卷积和池化操作,特征图的尺寸逐渐减小,特征也逐渐变得更加抽象。这使得小的特征图可以用于检测大的目标,而大的特征图则可以用于检测小的目标。SSD继承了YOLO的思路,将目标检测转换为回归问题。SSD在每个特征图上应用了3x3的卷积操作,然后进行目标检测。这样可以更好地适应不同尺寸的目标,并提高检测的准确性。
语义分割是通过像素级别的分类将图像分割成具有语义含义的区域块,并识别每个区域块的语义类别。传统方法和基于卷积神经网络的方法是实现语义分割的两种主要方式。传统方法包括随机森林、条件随机场、灰度分割和SVM等,而基于卷积神经网络的方法如FCN、UNet和SegNet则利用深度学习模型自动学习图像特征,实现端到端的分类学习,提高语义分割的精确度和效率。
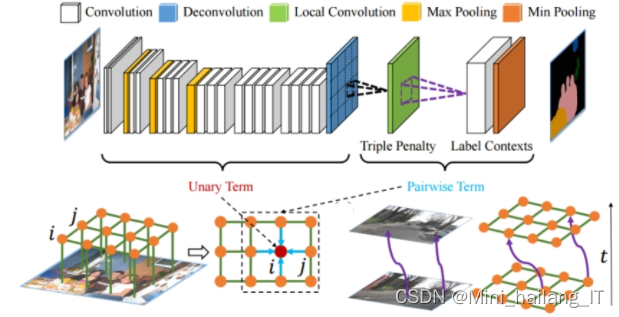
特征的融合是语义分割中一个重要的手段,它通过将不同深度或同层次的网络输出特征图进行整合,提高分割性能。特征融合可以通过早融合或晚融合的方式实现。低层特征具有更高的分辨率和更多的细节信息,但语义表达不够精准,而高层特征则具有更强的语义信息但分辨率较低。因此,如何将两者融合,取得精华并去除糟粕,对于改善分割模型性能至关重要。
几何校正是对失真的成像进行处理,以恢复图像到未成像前的理想状态。它主要应用于遥感图像和医学图像领域。在指针仪表读数识别中,几何校正也是必不可少的,因为仪表图像在采集过程中会产生几何失真,降低图像质量。几何校正的目的是消除这些失真对指针仪表读数识别的影响,以提高识别精度和难度。
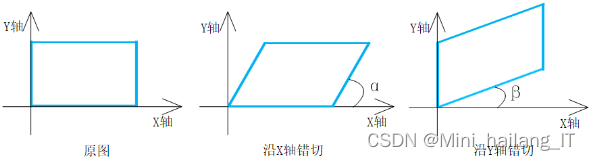
常见的几何校正算法包括仿射变换、透视变换和特征配准算法(如SIFT)。仿射变换可以进行平移、旋转、缩放和错切等基本几何变换,透视变换则可以处理更复杂的透视畸变。这些变换会将图像中的每个像素位置映射到校正后的位置。
几何校正算法可以概括为两个步骤:几何变换和灰度插值。几何变换是通过应用变换矩阵将图像进行形状和位置的调整。在变换后的图像中,每个像素的颜色值需要从原始图像中找到相应位置的颜色值进行填充。这涉及到灰度插值的技术,常见的方法有最近邻插值、双线性插值和三次线性插值,用于确定变换后像素的颜色值。
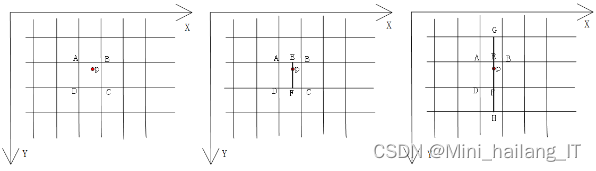
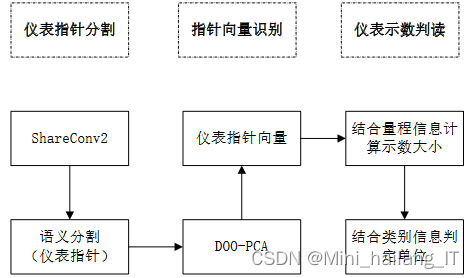
在仪表指针的识别过程中,可以使用语义分割算法对仪表图像进行分割,以提取出指针的区域。语义分割算法可以将图像按照像素级别进行分类,将指针与其他区域进行区分。接下来,可以采用改进的PCA算法对提取的指针区域进行拟合。PCA(主成分分析)是一种常用的降维算法,但在这里被用于估计指针的方向。通过对指针区域进行PCA拟合,可以得到指针的主要方向向量。这个向量可以提供指针的斜率信息,指示指针在图像中的倾斜程度。此外,通过计算向量所在的象限,可以确定指针在仪表上的位置。
相关代码示例:
resnet = models.resnet50(pretrained=True)
num_classes = 2 # 仪表目标和背景两个类别
num_features = resnet.fc.in_features
resnet.fc = torch.nn.Linear(num_features, num_classes)
unet = YourUNetModel()
criterion_detection = CrossEntropyLoss()
criterion_segmentation = BCELoss()
optimizer_detection = Adam(resnet.parameters(), lr=0.001)
optimizer_segmentation = Adam(unet.parameters(), lr=0.001)
transform = transforms.Compose([
transforms.ToTensor()
])
dataset = YourDataset(transform=transform)
dataloader = DataLoader(dataset, batch_size=32, shuffle=True)
for epoch in range(num_epochs):
for images, targets, masks in dataloader:
resnet.train()
optimizer_detection.zero_grad()
outputs_detection = resnet(images)
loss_detection = criterion_detection(outputs_detection, targets)
loss_detection.backward()
optimizer_detection.step()
unet.train()
optimizer_segmentation.zero_grad()
outputs_segmentation = unet(images)
loss_segmentation = criterion_segmentation(outputs_segmentation, masks)
loss_segmentation.backward()
optimizer_segmentation.step()海浪学长项目示例:























 1020
1020

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









