







 本文指导读者如何在Python环境中配置机器学习开发环境,包括安装Ananconda,创建隔离环境,安装OpenCV和PyTorch,以及解决Qt插件加载问题和依赖库适配,如Gym和Mujoco的版本选择。
本文指导读者如何在Python环境中配置机器学习开发环境,包括安装Ananconda,创建隔离环境,安装OpenCV和PyTorch,以及解决Qt插件加载问题和依赖库适配,如Gym和Mujoco的版本选择。
入门机器学习的第一只拦路虎就是配置环境,一些经典教材和教程的上的那些代码都是在几年前写作的,然后呢,这些obsolete[过时的]代码也就相应需要配置那些环境,除了主要的库以外,其他的一堆库都要都要互相依赖。然后开发者写requirements.txt的时候,一般都只写版本要大于等于多少,而不写会限制于小于多少,然而实际上有些库就会在某个版本就会发生什么改变,然后一些用法就用不了了。这种情况下,有很大的概率就会在一些地方报错,就得排查哪些库他改了之后就不行了,需要做出相应的适配。
首先安装Ananconda,这里不再赘述。
创建环境
conda create gym019 python==3.7
conda activate gym019至于为什么会是3.7,后面会解释。其他开始之前,建议先做好换源
Opencv-python
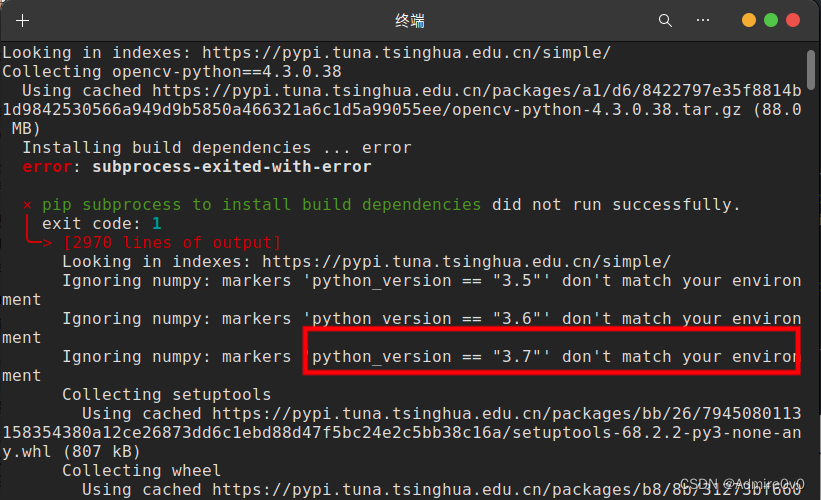
首先安装opencv,不然其他包对这个包有依赖,安装了依然是需要重新安装老版本的。
pip install opencv-python==4.3.0.36不想安装老版本的opencv-python那就需要安装 opencv-python-headless
pip install opencv-python-headless不然在调用matplotlib画图时会报错,如下图所示。
QObject::moveToThread: Current thread (0x80d3f00) is not the object's thread (0x8063280).
Cannot move to target thread (0x80d3f00)
qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "/home/dilettante/anaconda3/envs/Pytorch/lib/python3.10/site-packages/cv2/qt/plugins" even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.
Available platform plugins are: xcb, eglfs, minimal, minimalegl, offscreen, vnc, webgl.
已放弃 (核心已转储)参考:Uuntu20.04出现“qt.qpa.plugin: Could not load the Qt platform plugin “xcb“ in...已放弃 (核心已转储)”问题解决记录
如果仍有问题,建议参考Ubuntu20.04下解决Qt出现qt.qpa.plugin:Could not load the Qt platform plugin “xcb“ 问题
opencv-python依赖numpy,而对应的numpy依赖的版本要求是3.5-3.7之间。
随后安装一系列库。
PyTorch
请参考PyTorch-Get Start选择合适的安装命令。
我安装的是CPU版本的。
conda install pytorch torchvision torchaudio cpuonly -c pytorchGym 和 Mujoco
需要安装0.19.0版本的以适配一些如env.seed()等函数。下载链接:openai / gym
下载并解压在一个合适的位置,请注意这些文件后面不能删掉。
先安装基础版本的试一下。
cd gym # 到你解压的文件目录下 / 直接资源管理器中右键“在终端中打开”也可以
pip install -e .期间也许需要安装一些GCC编译工具,有些也可能提前安装好了。
sudo apt-get install build-essential libgl1-mesa-dev libglew-dev libsdl2-dev libsdl2-image-dev libglm-dev libfreetype6-dev libglfw3-dev libglfw3 patchelf pip install setuptools==63.2.0
pip install cython==0.29
pip install swig期间也许还会提示缺少什么什么,但是解决方案一般都可以轻松搜到。如果还有问题,欢迎联系我。
如果可以,接下来安装mujoco和mujoco-py。gym的0.19.0版本依然对应的是mujoco150的版本。
cd ~
mkdir .mujoco
wget https://www.roboti.us/download/mjpro150_linux.zip
unzip mjpro150_linux.zip # 也许需要安装unzip
wget https://www.roboti.us/file/mjkey.txt然后配置bashrc
# Mujoco
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/username/.mujoco/mjpro150/bin
# 替换成自己的username
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
# 后面会用到的妙妙目录执行一下bin目录下的simulate文件测试一下是否安装成功。
cd .mujoco/mjpro150/bin/
./simulate然后回到gym解压的目录,安装完整的环境。
cd gym
pip install -e .[all]此部分参考:如何在linux中安装gym[all]
如果安装不成功,则先单独安装mujoco-py,这里安装1.50版本的,先选定一个合适的文件夹:
wget https://github.com/openai/mujoco-py/archive/refs/tags/1.50.1.0.zip
unzip 1.50.1.0.zip
cd mujoco-py-1.50.1.0
pip install -r requirements.txt
pip install -r requirements.dev.txt
pip3 install -e .其他依赖
安装matplotlib等库……
conda install matplotlib如果还有其他的需要的,自行安装。
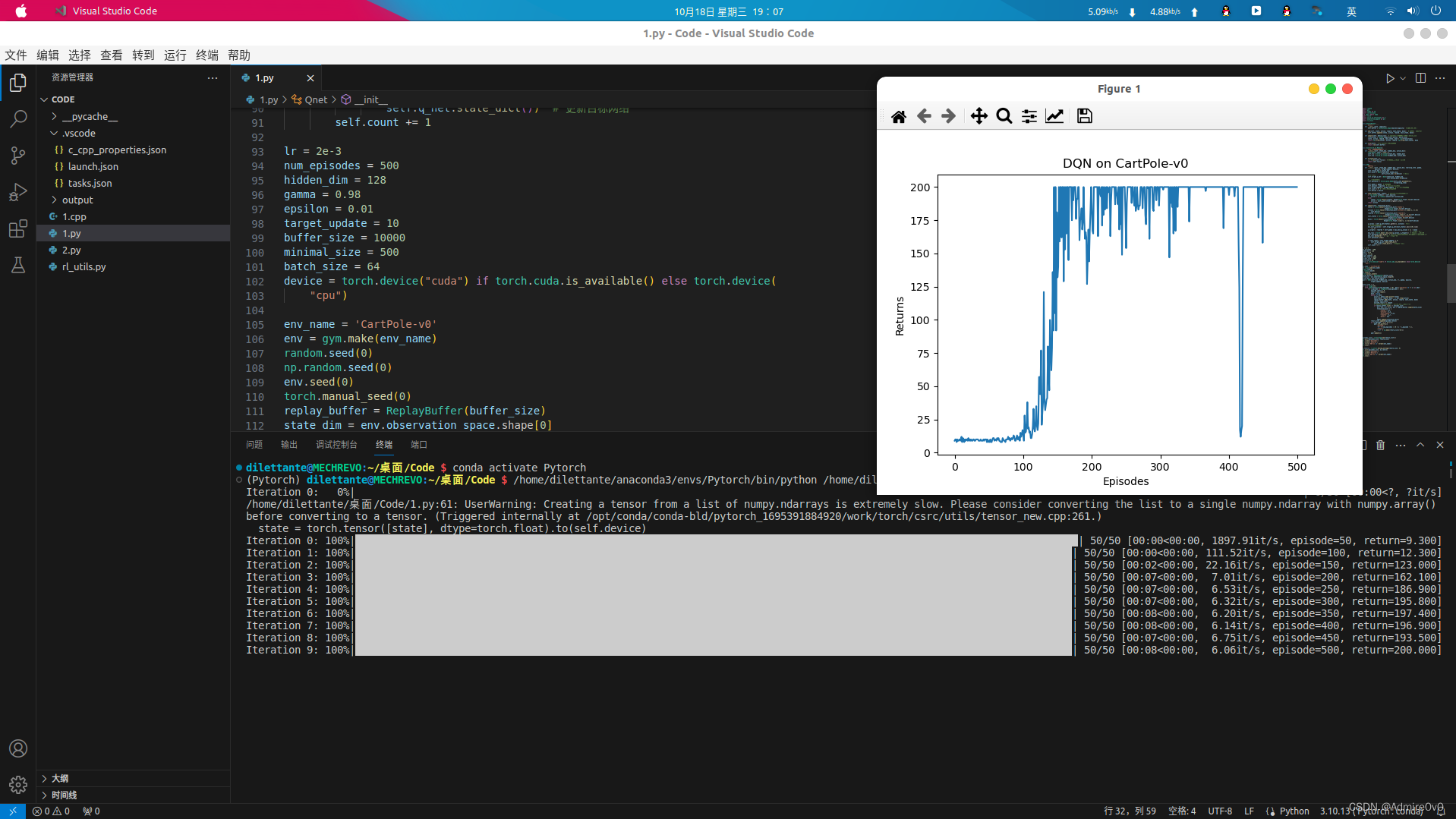
测试安装效果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









