







 超级会员免费看
超级会员免费看
前言
路径规划是机器人导航和自主移动中的一个关键问题。其中,A算法是一种广泛应用的最短路径搜索算法,因其高效和最优性而备受关注。本文将介绍如何在MATLAB环境下实现A算法,并在2D网格地图上进行路径规划。该实现为机器人导航、无人车路径规划等应用提供了一个有价值的参考。
正文
A*算法是一种启发式搜索算法,通过评估每个节点到终点的估计代价来确定最优路径。其核心思想如下:
- 维护两个列表:开放列表(Open List)和关闭列表(Closed List)。开放列表存储待搜索的节点,关闭列表存储已经搜索过的节点。
- 从开放列表中选择一个代价最小的节点,将其从开放列表移动到关闭列表。
- 对于选中节点的邻居节点,计算它们到起点的实际代价(g值)和到终点的估计代价(h值)。
- 如果邻居节点不在开放列表或关闭列表中,或者它们的代价更小,则将其加入开放列表,并更新其父节点。
- 重复步骤2-4,直到找到终点或开放列表为空(无解)。
- 从终点回溯到起点,得到最短路径。
在2D网格地图上实现A*算法时,可以使用曼哈顿距离作为启发式函数(h值)。曼哈顿距离是两个点在水平和垂直方向上的绝对距离之和,它是从当前节点到终点的最小距离的下界。
代码实现
以下是MATLAB实现A*算法的代码:
% 创建2D网格地图
map = [
0 0 0 0 0 0 0 0 0 0;
0 0 1 1 0 0 0 1 0 0;
0 0 0 1 0 0 0 1 0 0;
0 0 0 1 0 0 1 1 0 0;
0 0 0 1 0 0 1 0 0 0;
0 0 0 1 1 1 1 0 0 0;
0 0 0 0 0 0 0 0 0 0;
0 0 0 1 1 1 1 1 0 0;
0 0 0 0 0 0 0 1 0 0;
0 0 0 0 0 0 0 0 0 0;
];
% 设置起点和终点
start = [2, 2];
goal = [9, 9];
% 运行A*算法
path = a_star_path_planning(map, start, goal);
% 可视化结果
visualize_path(map, start, goal, path);
function path = a_star_path_planning(map, start, goal)
[rows, cols] = size(map);
open_list = [start, 0, heuristic(start, goal)];
closed_list = false(rows, cols);
parent = zeros(rows, cols, 2);
g_score = inf(rows, cols);
g_score(start(1), start(2)) = 0;
while ~isempty(open_list)
[~, idx] = min(open_list(:, 3));
current = open_list(idx, 1:2);
if isequal(current, goal)
path = reconstruct_path(parent, start, goal);
return;
end
open_list(idx, :) = [];
closed_list(current(1), current(2)) = true;
neighbors = get_neighbors(current, rows, cols);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
if closed_list(neighbor(1), neighbor(2)) || map(neighbor(1), neighbor(2)) == 1
continue;
end
tentative_g = g_score(current(1), current(2)) + 1;
if tentative_g < g_score(neighbor(1), neighbor(2))
parent(neighbor(1), neighbor(2), :) = current;
g_score(neighbor(1), neighbor(2)) = tentative_g;
f_score = tentative_g + heuristic(neighbor, goal);
if ~any(ismember(open_list(:, 1:2), neighbor, 'rows'))
open_list = [open_list; neighbor, f_score];
else
open_list(ismember(open_list(:, 1:2), neighbor, 'rows'), 3) = f_score;
end
end
end
end
path = [];
end
function h = heuristic(node, goal)
h = norm(node - goal, 1); % Manhattan distance
end
function neighbors = get_neighbors(node, rows, cols)
directions = [-1 0; 1 0; 0 -1; 0 1];
neighbors = node + directions;
neighbors = neighbors(neighbors(:, 1) > 0 & neighbors(:, 1) <= rows & ...
neighbors(:, 2) > 0 & neighbors(:, 2) <= cols, :);
end
function path = reconstruct_path(parent, start, goal)
path = goal;
current = goal;
while ~isequal(current, start)
current = squeeze(parent(current(1), current(2), :))';
path = [current; path];
end
end
function visualize_path(map, start, goal, path)
figure;
imagesc(map);
colormap('gray');
hold on;
plot(start(2), start(1), 'go', 'MarkerSize', 10, 'LineWidth', 2);
plot(goal(2), goal(1), 'ro', 'MarkerSize', 10, 'LineWidth', 2);
if ~isempty(path)
plot(path(:, 2), path(:, 1), 'b-', 'LineWidth', 2);
end
title('A* 算法路径规划');
xlabel('X');
ylabel('Y');
axis equal;
grid on;
end
结果与说明
结果图
结果说明
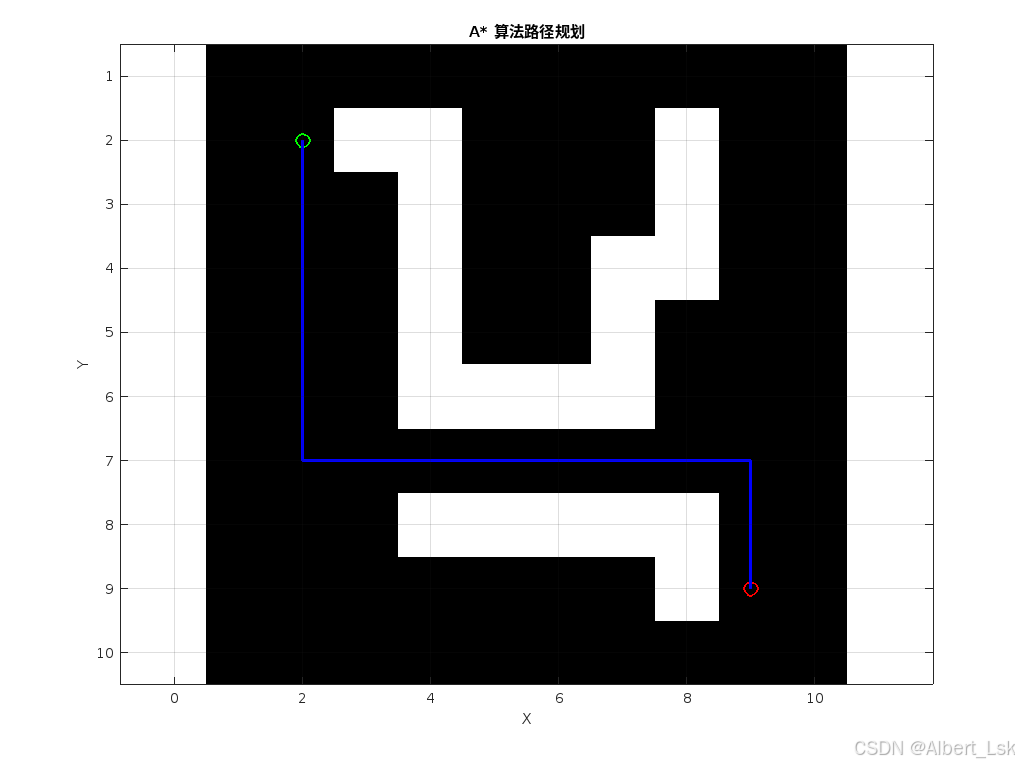
上图展示了A*算法在给定2D网格地图上的路径规划结果。图中,白色区域表示可通行区域,黑色区域表示障碍物。绿色圆点表示起点,红色圆点表示终点,蓝色线条表示算法找到的最短路径。
从结果可以看出,A*算法成功避开了障碍物,找到了一条从起点到终点的最短路径。该路径绕过了中间的障碍区域,同时保持了路径的平滑性和效率。
总结
本文介绍了如何使用MATLAB实现基于A算法的路径规划。A算法是一种启发式搜索算法,通过评估每个节点到终点的估计代价来确定最优路径。在2D网格地图上,我们可以使用曼哈顿距离作为启发式函数,并通过维护开放列表和关闭列表来高效地搜索最短路径。
该实现展示了A*算法在MATLAB环境下的应用,为机器人导航、无人车路径规划等领域提供了一个有价值的参考。未来的工作可以进一步扩展该算法,如支持更复杂的地图环境、考虑动态障碍物、结合其他优化技术等,以满足更广泛的应用需求。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











