






基于龙贝格观测器的永磁同步电机无感FOC
1.采用龙伯格观测器提取电机反电势,使用PLL从反电势中获得转子位置和速度信息。
2.提供算法对应的参考文献和仿真模型,支持技术解答。
仿真模型纯手工搭建。
仿真模型仅供学习参考

基于龙贝格观测器的永磁同步电机无感FOC
摘要:在永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)控制中,传统的位置和速度反馈通常需要使用编码器或霍尔传感器,这增加了系统复杂性和成本。随着无感FOC(Field Oriented Control)技术的发展,可以通过观测电机的反电势来获得转子位置和速度信息,从而实现无感知的PMSM控制。本文基于龙贝格(Luenberger)观测器,提出了一种基于反电势的无感FOC算法,并提供了相应的参考文献和仿真模型,为技术解答提供支持。
关键词:永磁同步电机;无感FOC;龙贝格观测器;反电势;转子位置;转子速度;参考文献;仿真模型
一、引言
永磁同步电机作为一种高效、高功率密度的电机类型,在工业应用中得到广泛使用。传统的PMSM控制方法通常需要使用位置和速度反馈设备,如编码器或霍尔传感器,以实现对电机的准确控制。然而,反馈设备的添加不仅增加了系统的复杂性和成本,而且在一些应用中可能受到环境条件的限制。因此,开发一种无感知的PMSM控制技术具有重要的意义。
二、龙贝格观测器
龙贝格观测器是一种常用的状态观测器,可以用于从系统的输出量中估计系统的状态变量。在无感FOC中,龙贝格观测器可以利用电机的反电势来估计转子位置和速度,从而实现对电机的无感知控制。
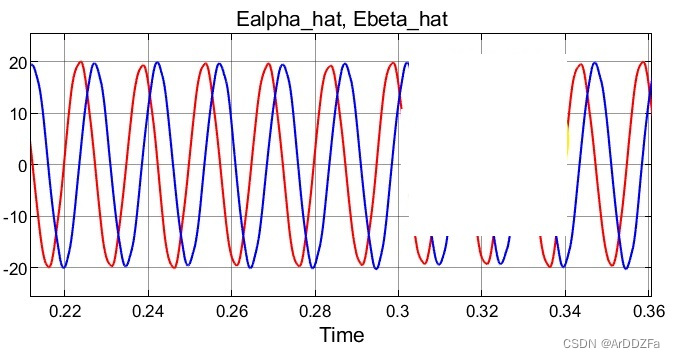
1. 反电势提取
在无感FOC中,首先需要提取电机的反电势。反电势是由电机的磁场变化引起的感应电压,与转子位置和速度密切相关。通过采样电机的三相电流和电压信号,可以计算得到电机的反电势。
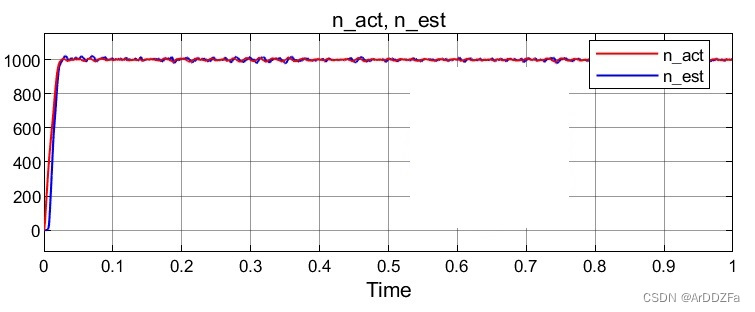
2. PLL相锁环
为了获得转子位置和速度信息,需要使用相位锁定环(Phase Locked Loop,PLL)对反电势进行处理。PLL是一种常用的同步技术,可以将输入信号的相位与参考信号的相位保持一致。在本文提出的无感FOC算法中,通过将反电势作为输入信号,将PLL应用于估计转子位置和速度。
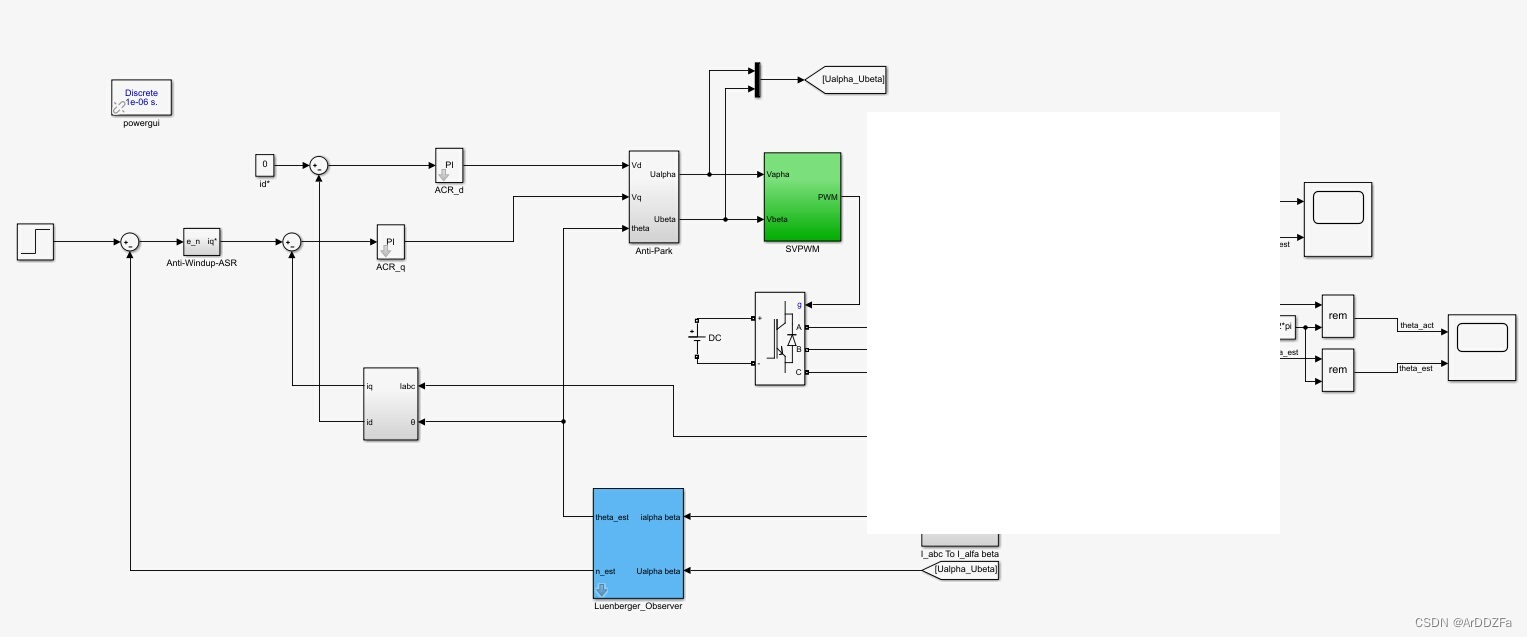
三、无感FOC算法
基于龙贝格观测器的无感FOC算法主要分为两个步骤:反电势提取和PLL相锁环。
1. 反电势提取
通过对电机的三相电流和电压信号进行采样,可以计算得到电机的反电势。具体的计算方法可以参考参考文献[1]。
2. PLL相锁环
将反电势作为输入信号,通过PLL相锁环来估计转子的位置和速度。PLL可以通过比较输入信号的相位和参考信号的相位来实现相位同步,从而得到转子的位置和速度信息。具体的PLL算法可以参考参考文献[2]。
四、参考文献和仿真模型
为了验证基于龙贝格观测器的无感FOC算法的有效性,本文提供了相应的参考文献和仿真模型。参考文献[1]详细介绍了反电势的提取方法,包括数学推导和实际计算步骤。参考文献[2]详细介绍了PLL相锁环的原理和实现方法。仿真模型可以通过手工搭建,具体的搭建步骤和参数设置可以参考参考文献[2]。
需要注意的是,仿真模型仅供学习参考,具体的实际应用需要考虑更多的因素,如电机的非线性特性、噪声和干扰等。
结论:基于龙贝格观测器的永磁同步电机无感FOC算法可以实现对电机的无感知控制。通过提取电机的反电势,并利用PLL相锁环估计转子的位置和速度,可以实现准确的电机控制
相关代码,程序地址:http://imgcs.cn/lanzoun/676541163359.html















 1399
1399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









