







 本文探讨了龙波格观测器的设计,涉及A矩阵特征值判断系统稳定性、状态空间方程的应用、特征值与特征向量的关系,以及与传递函数的关联。还介绍了观测器离散化、正交型锁相环受Ke和We影响及Simulink仿真的建立,重点关注速度环部分。
本文探讨了龙波格观测器的设计,涉及A矩阵特征值判断系统稳定性、状态空间方程的应用、特征值与特征向量的关系,以及与传递函数的关联。还介绍了观测器离散化、正交型锁相环受Ke和We影响及Simulink仿真的建立,重点关注速度环部分。
一、建立龙波格观测器
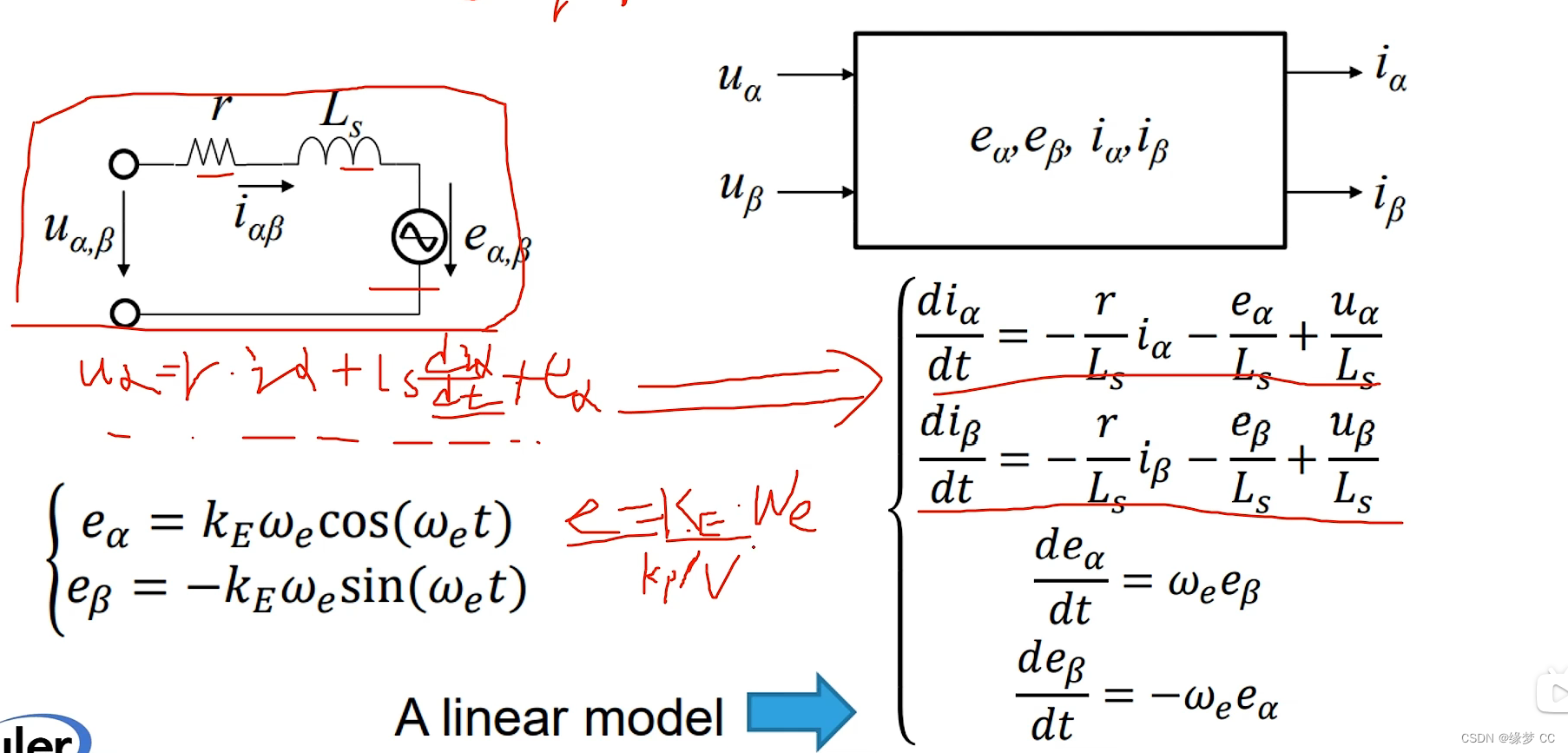
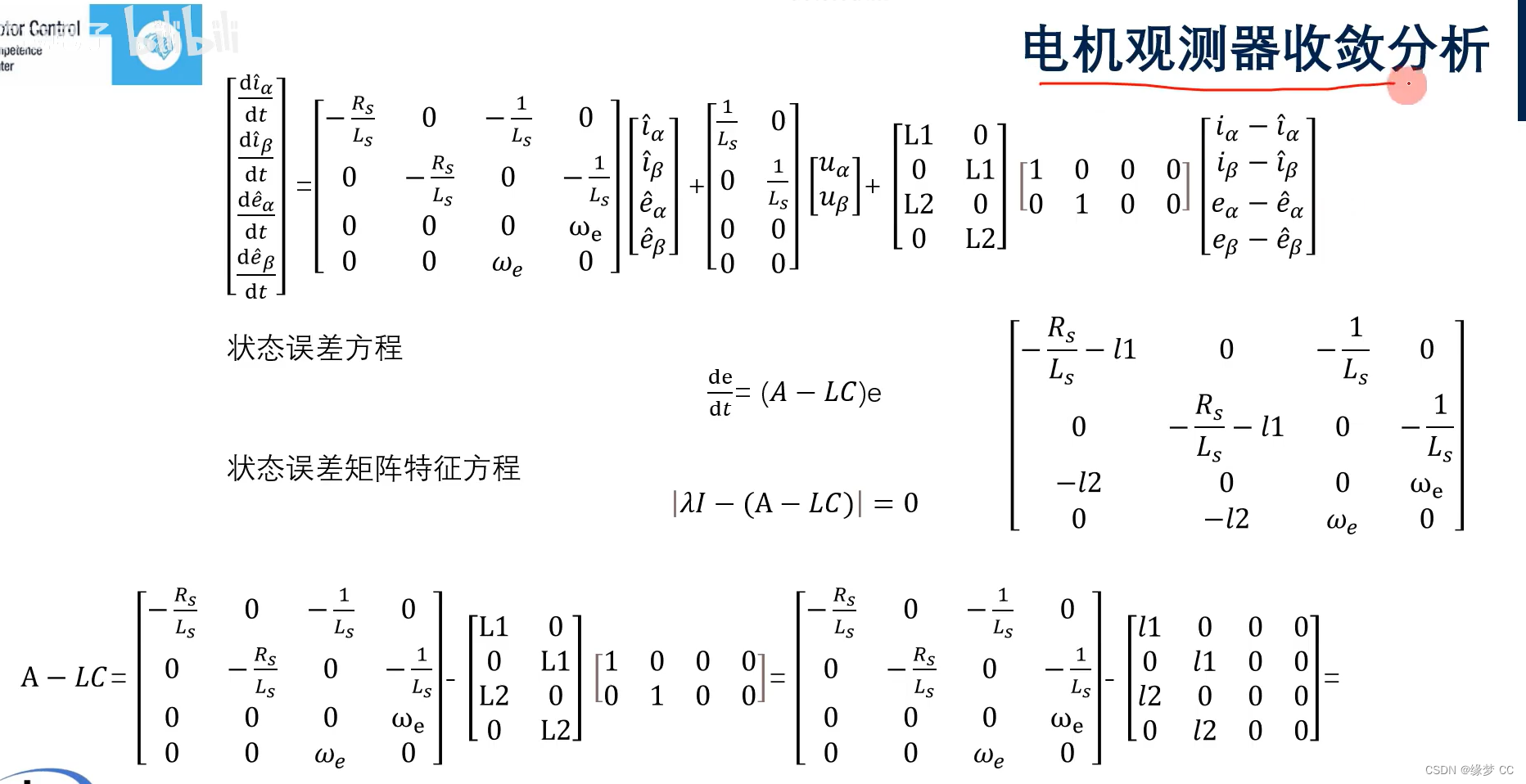
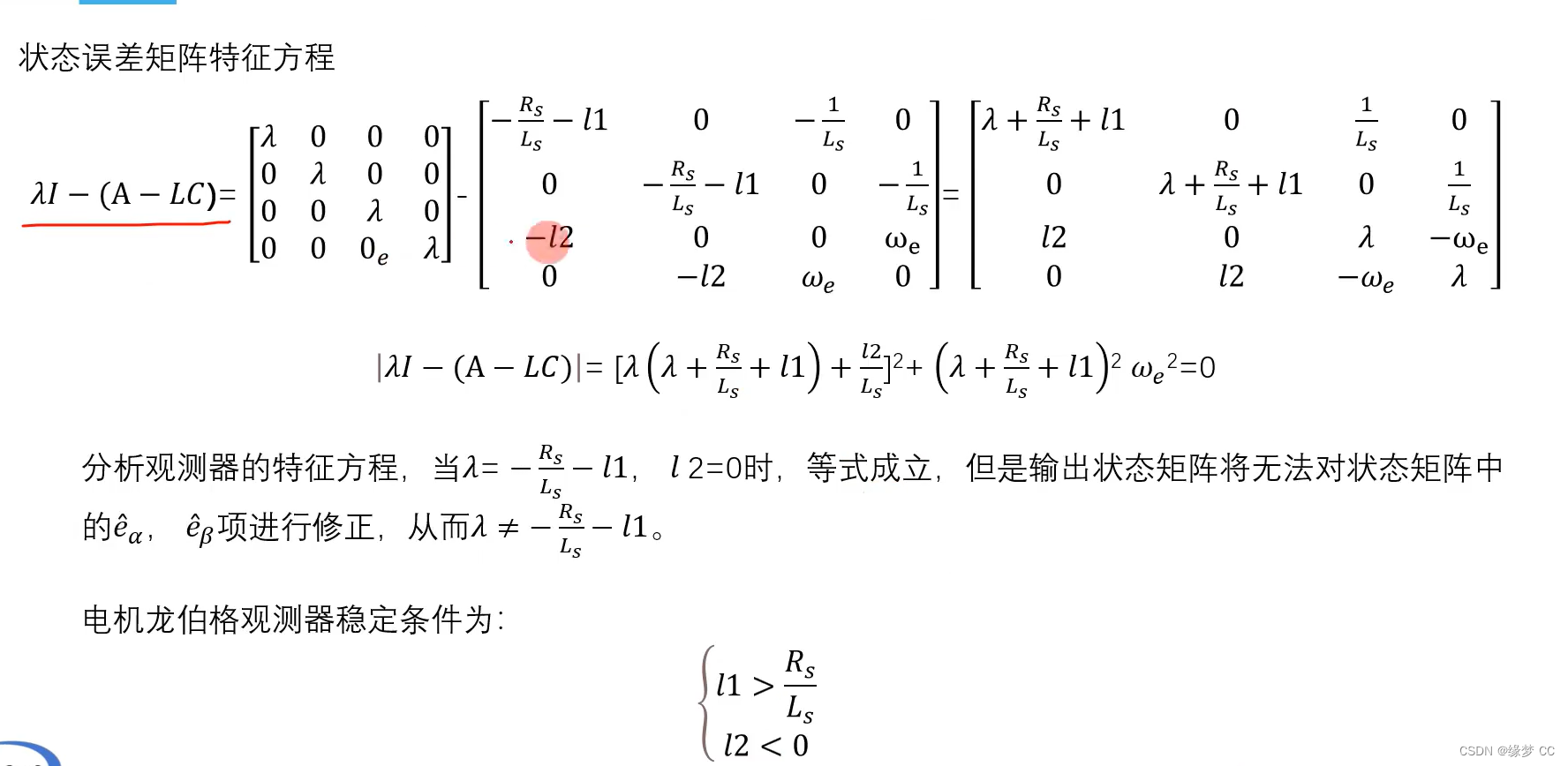
通过求解A矩阵的特征值来判断,整个系统是否稳定。
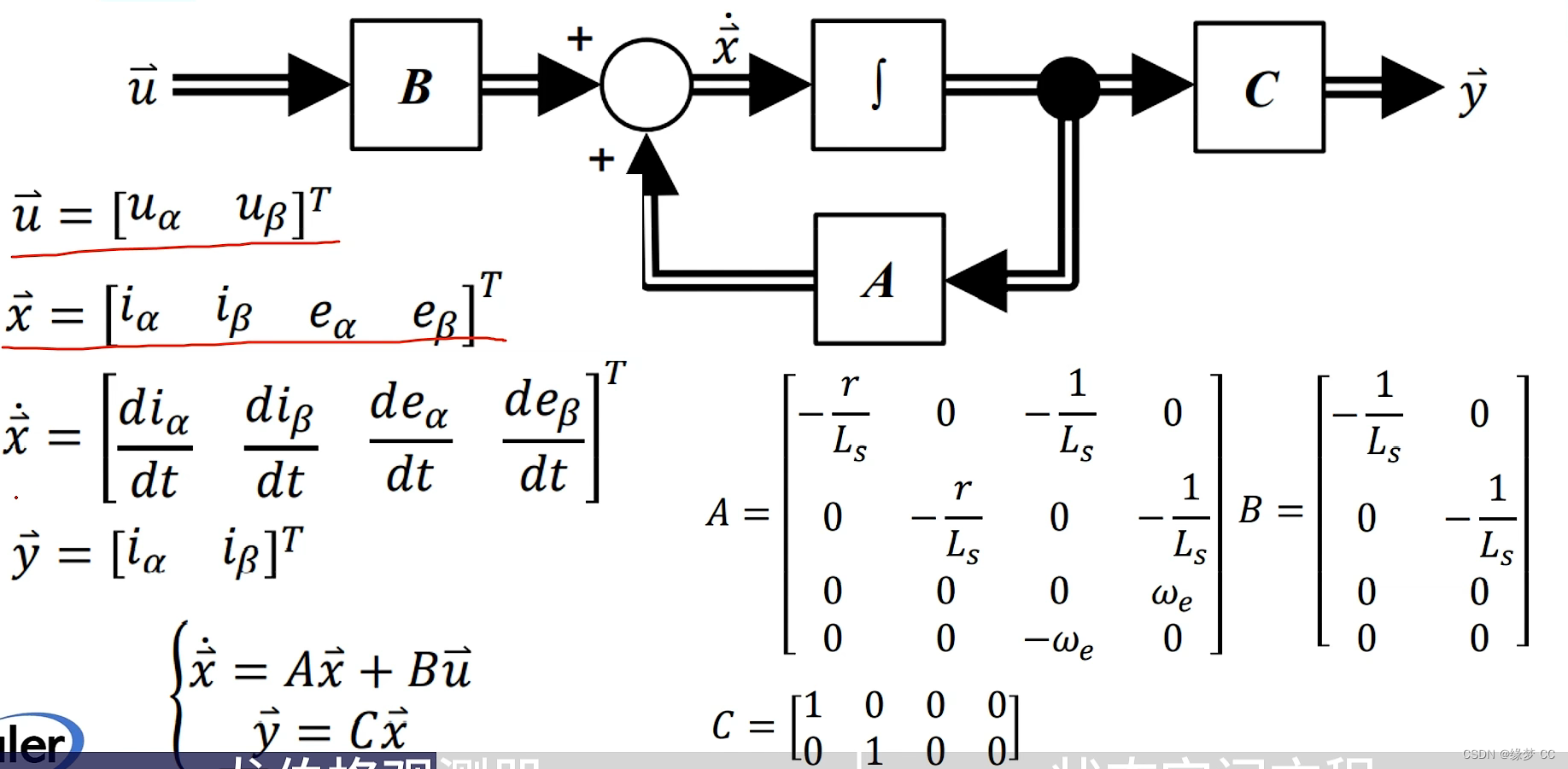
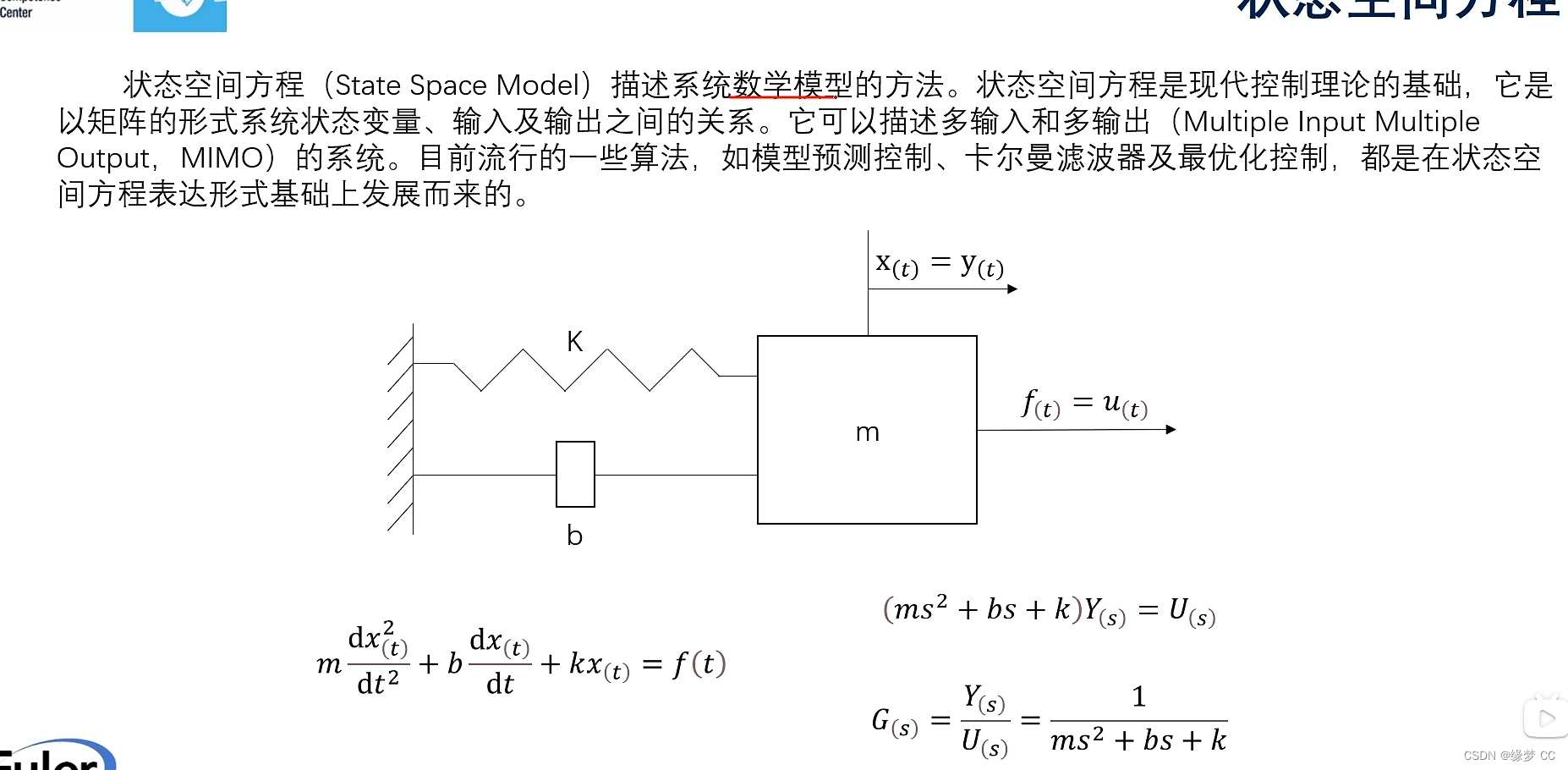
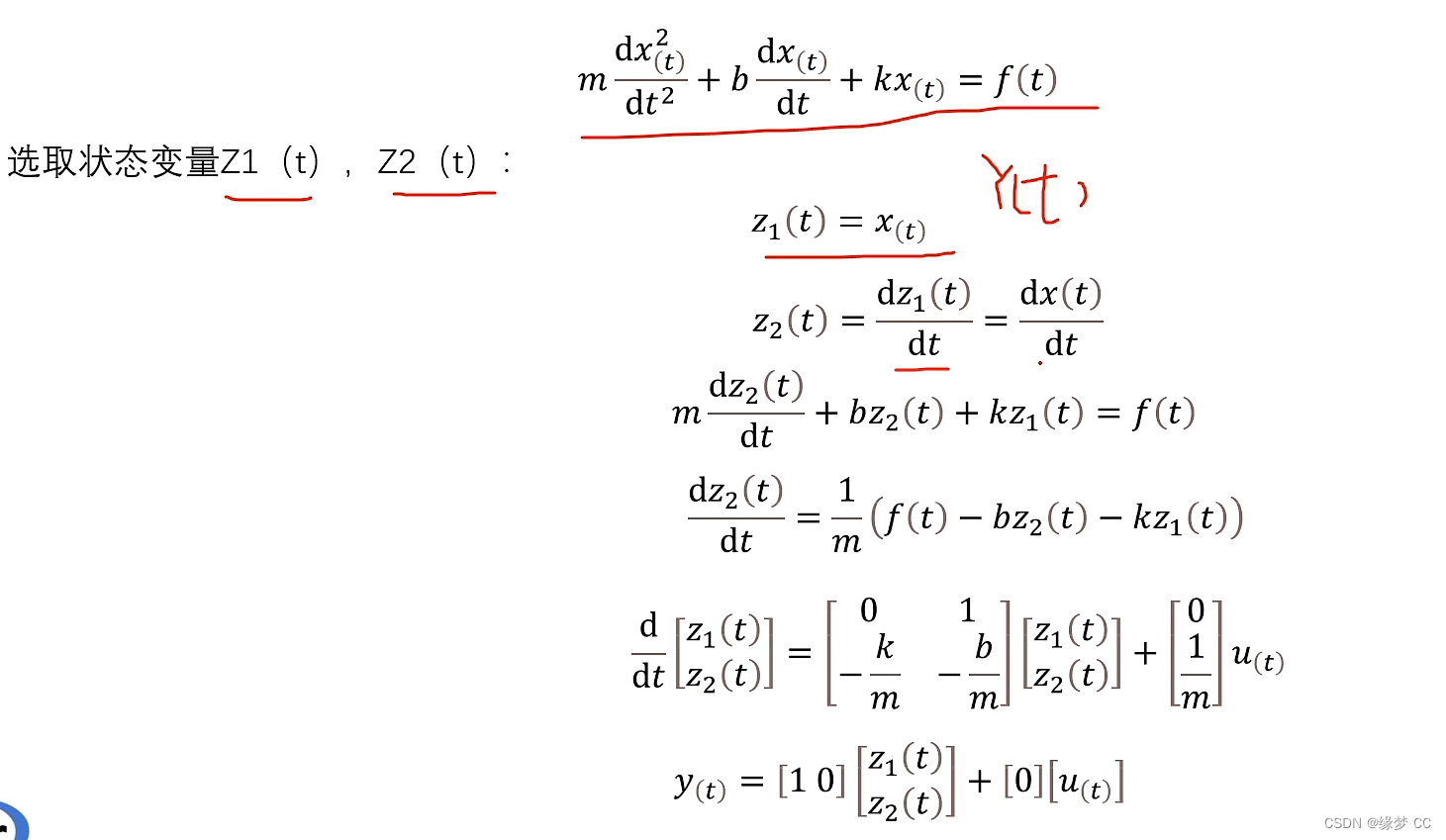
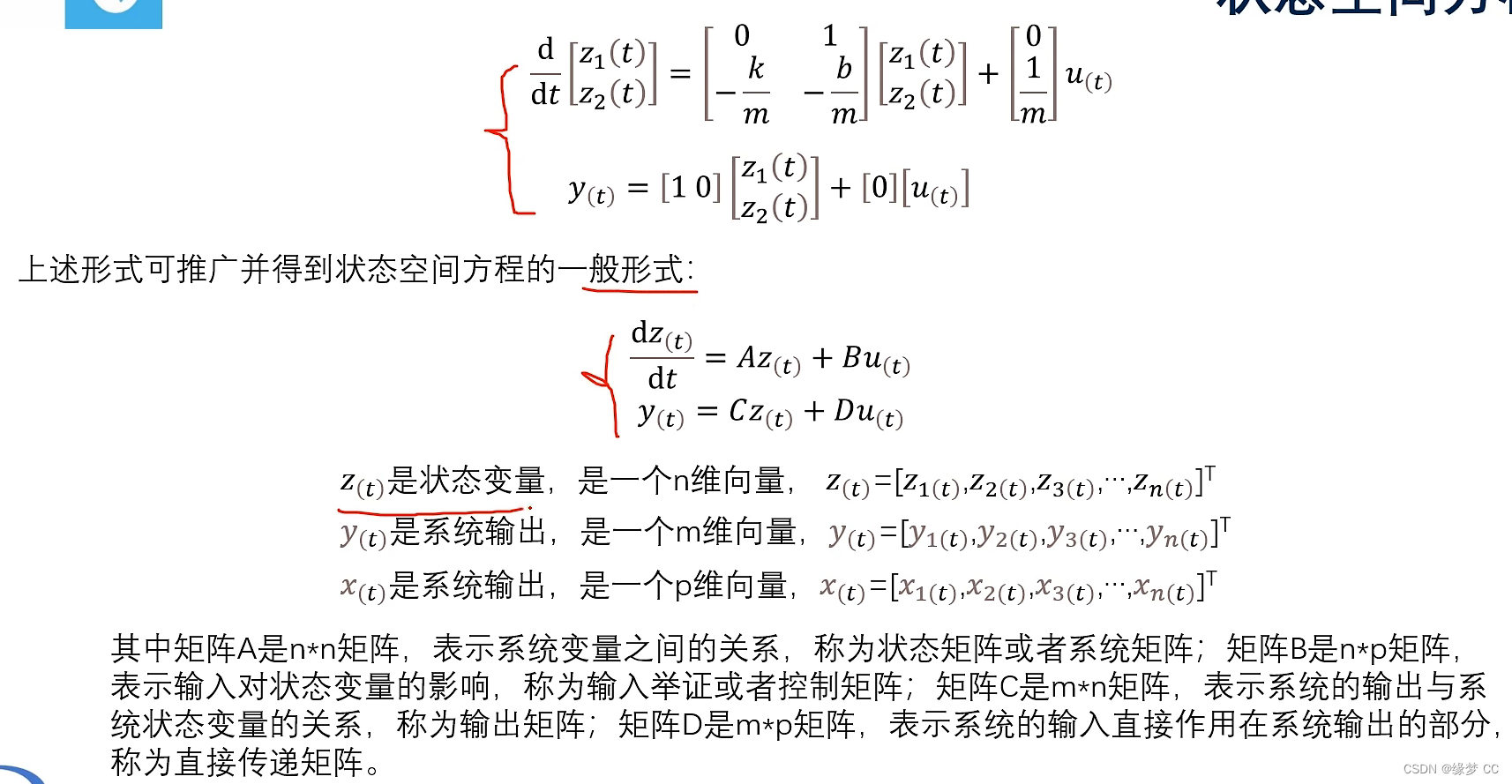
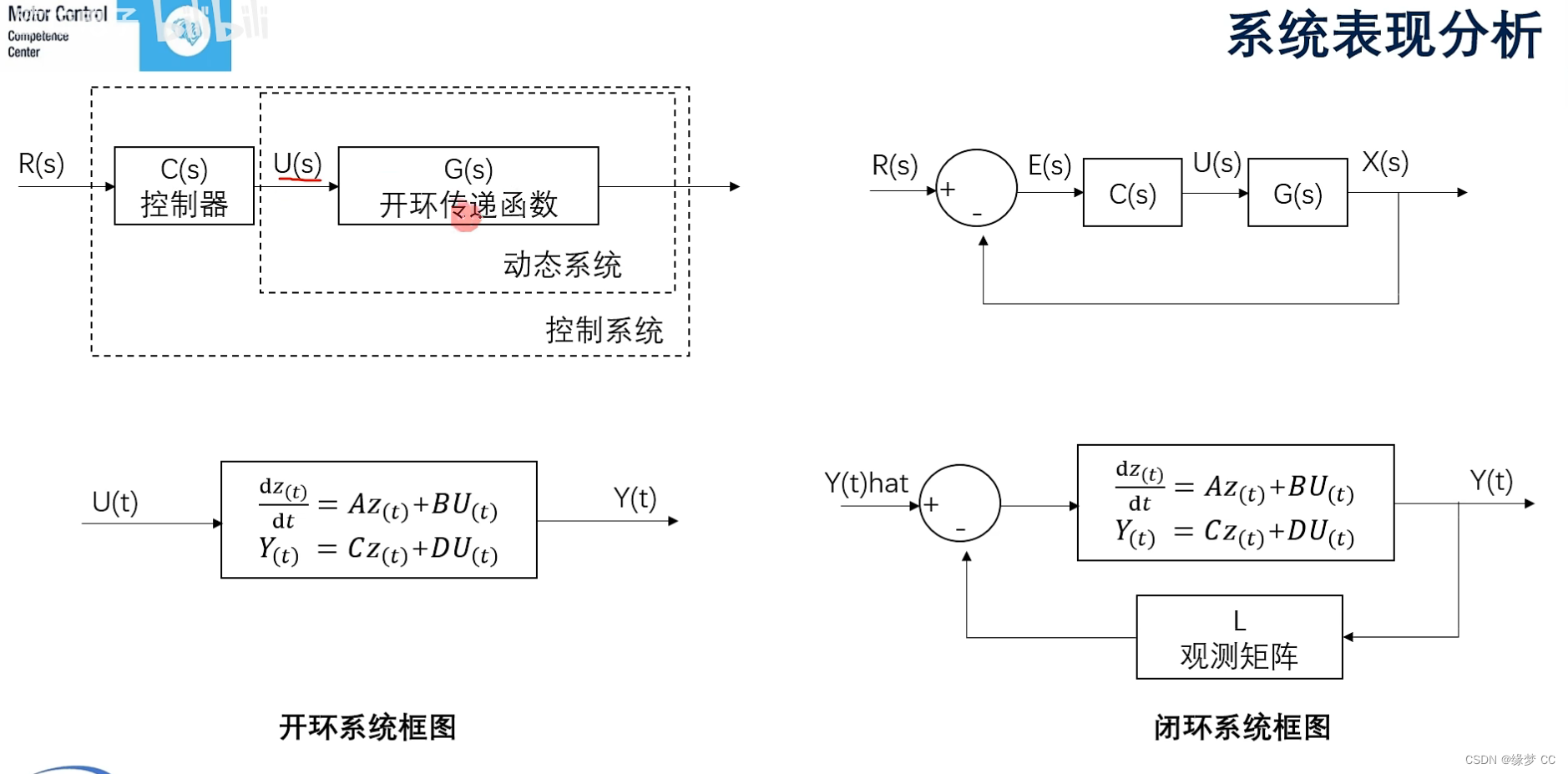
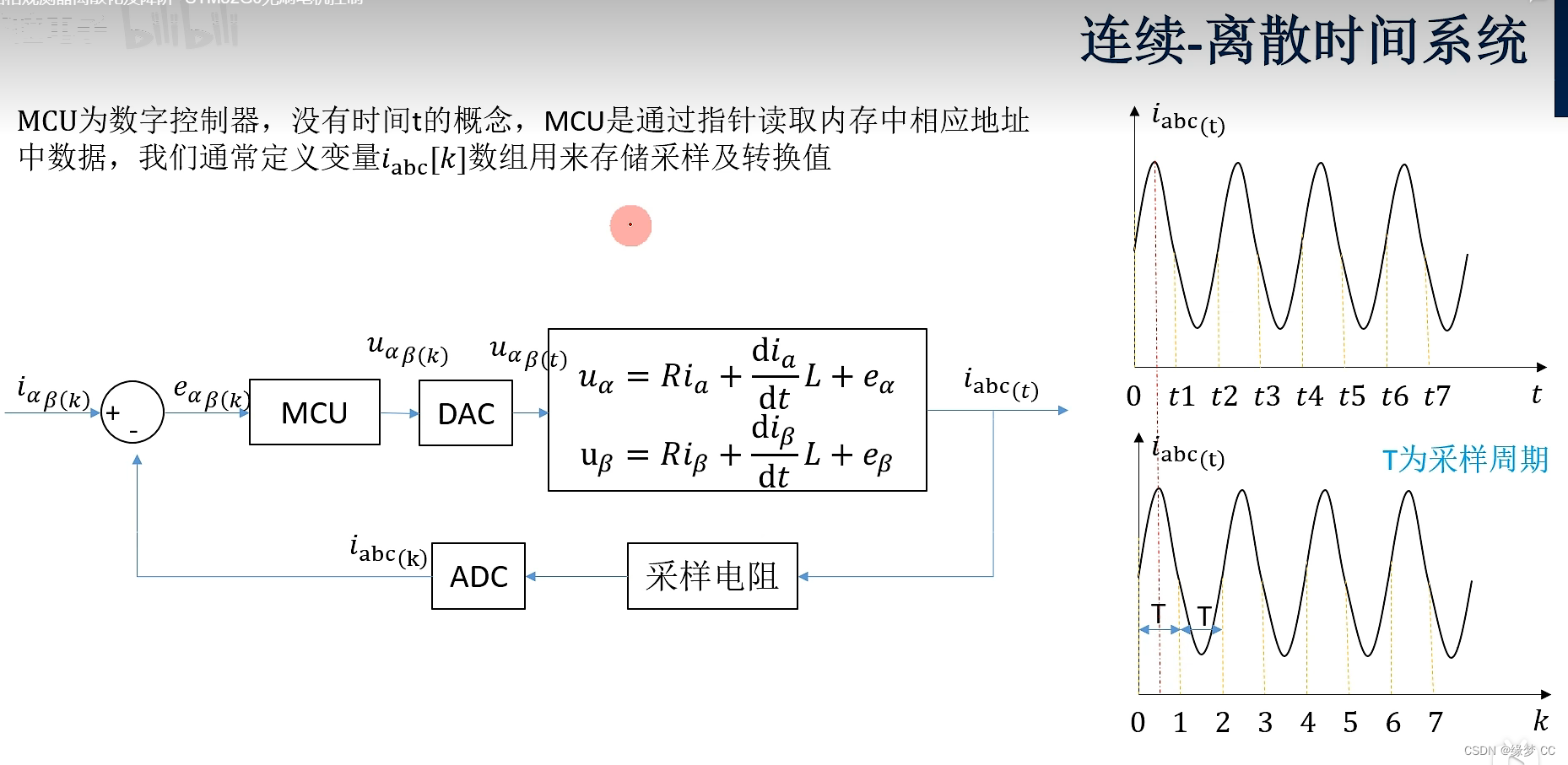
二、状态空间方程
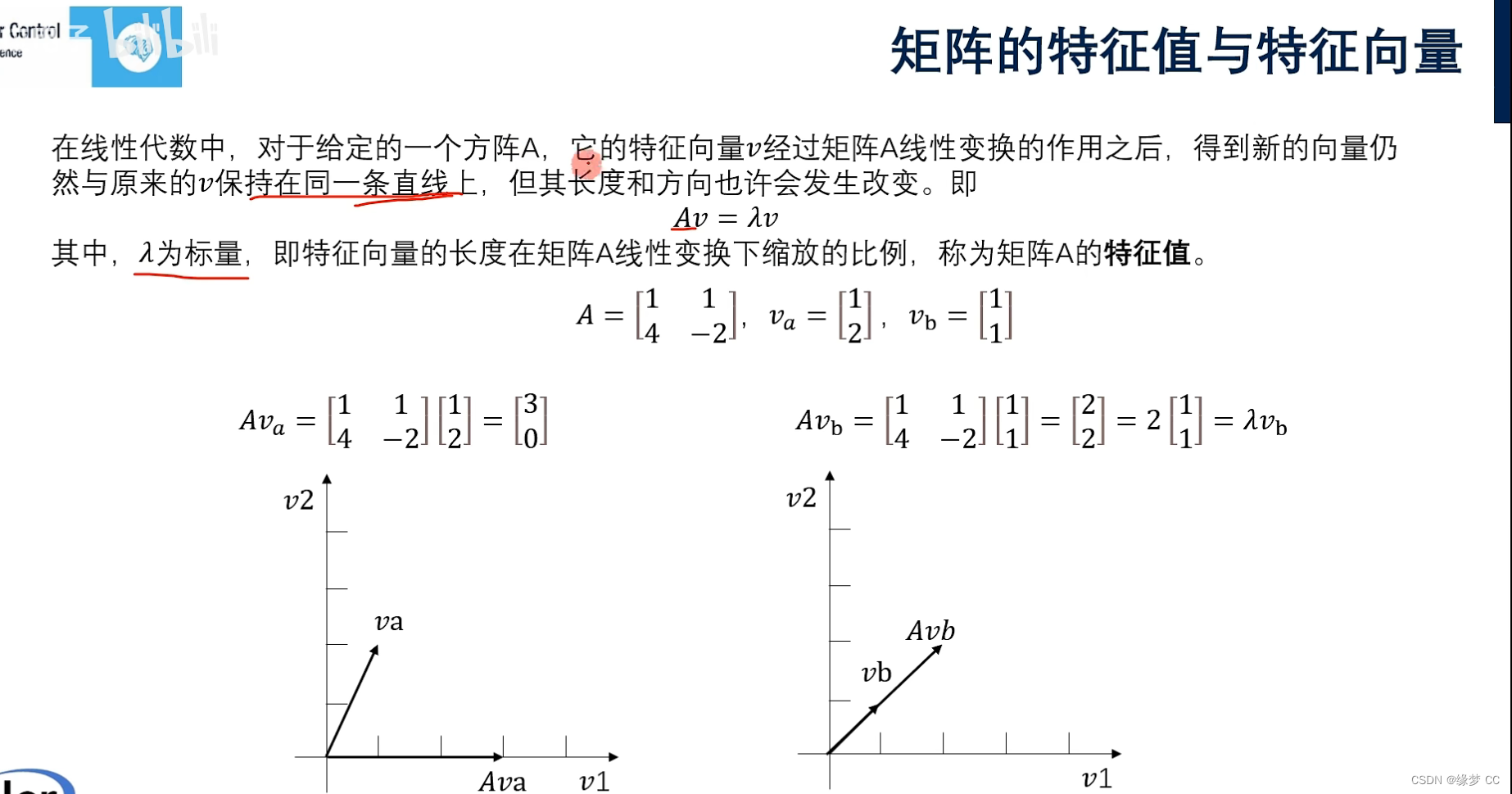
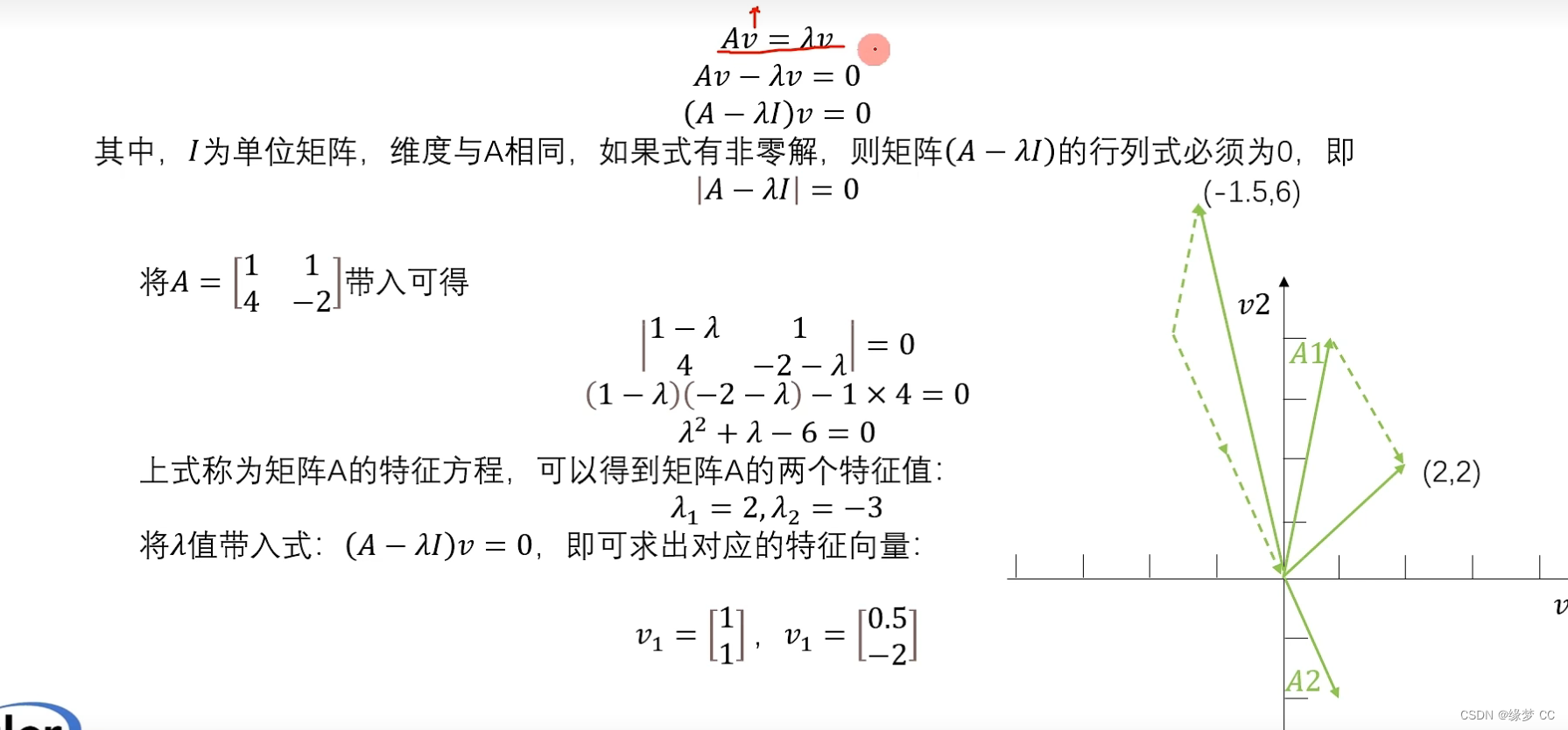
三、矩阵的特征值与特征向量
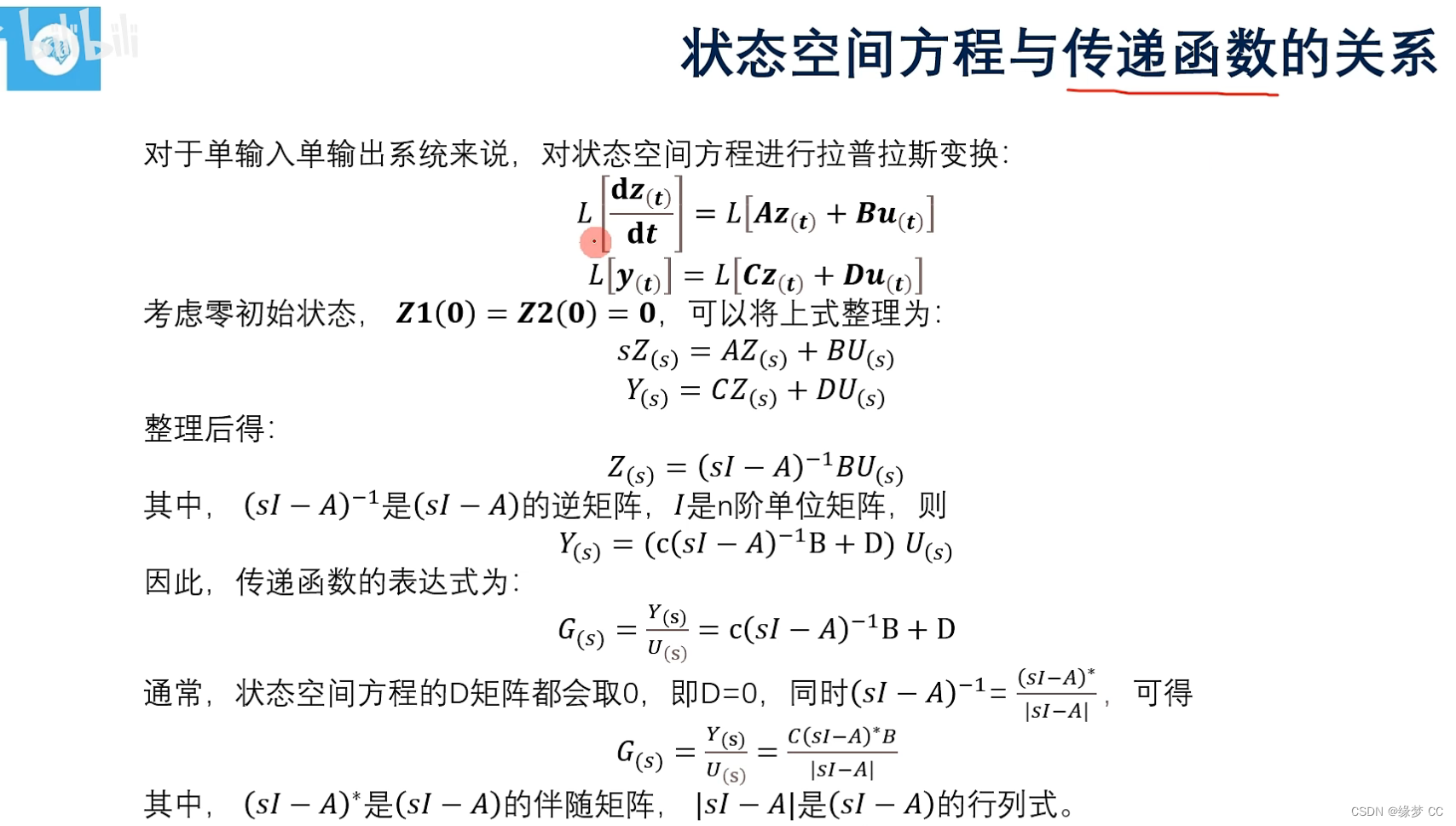
四、状态空间方程与传递函数的关系
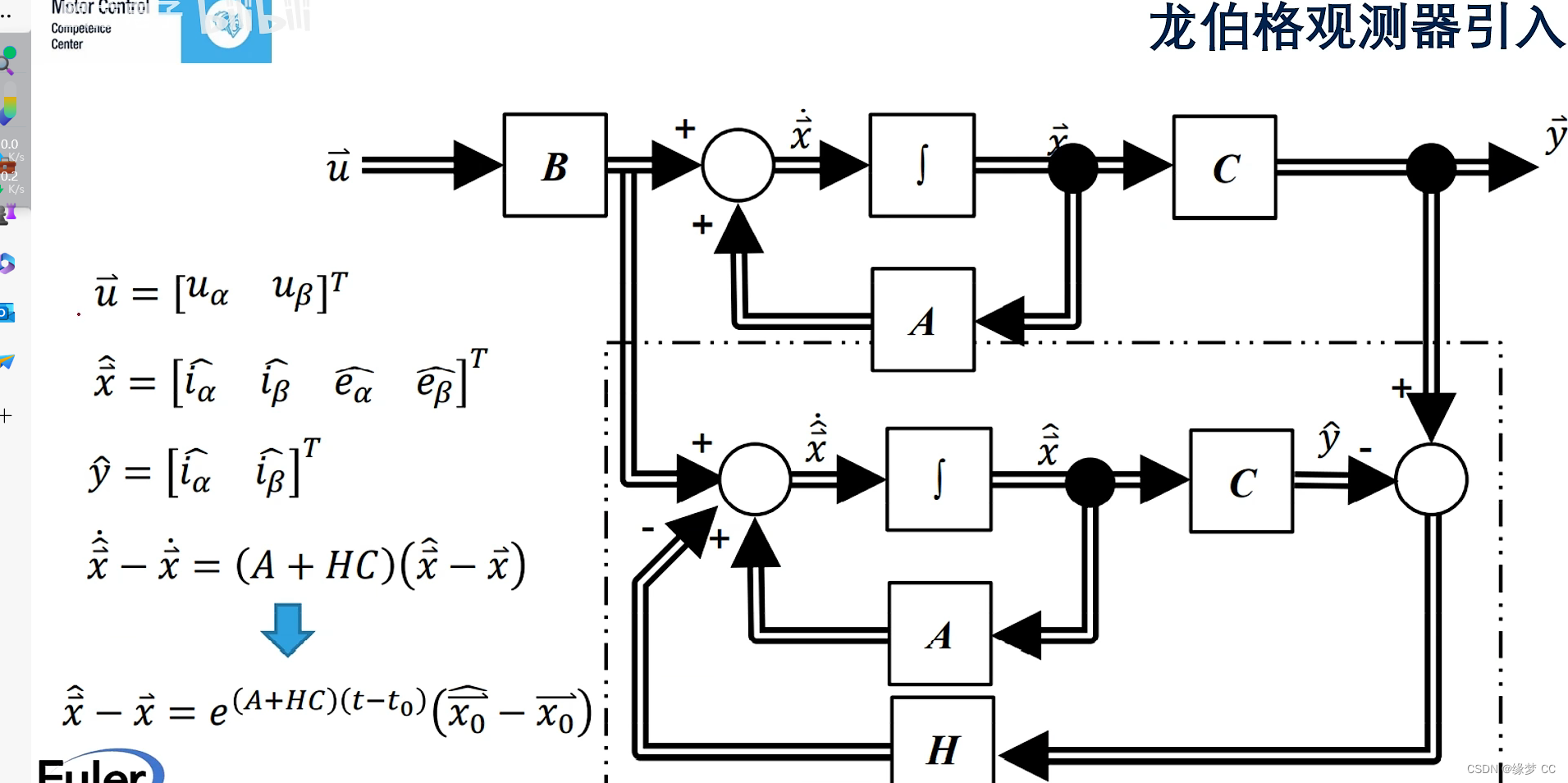
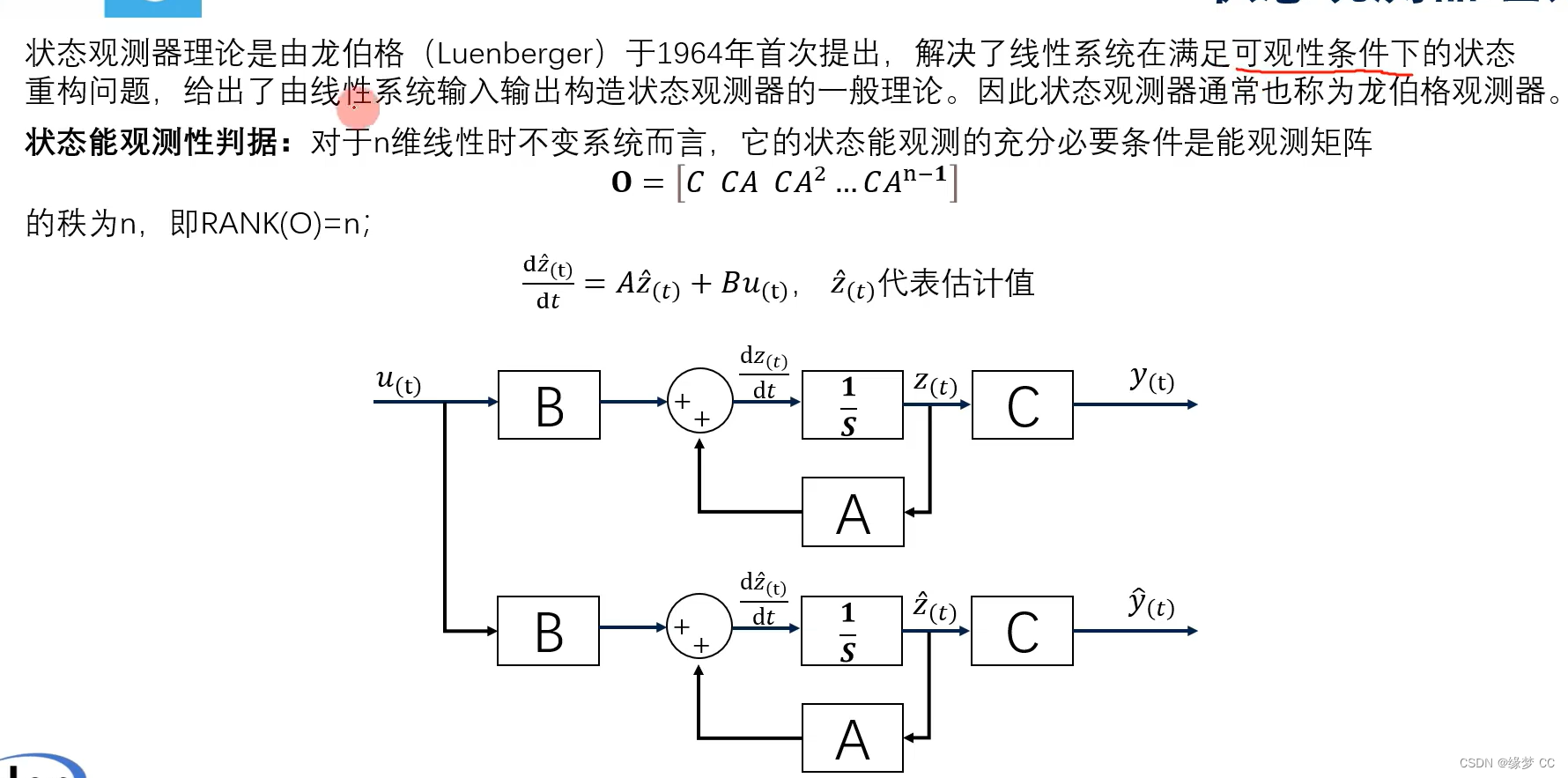
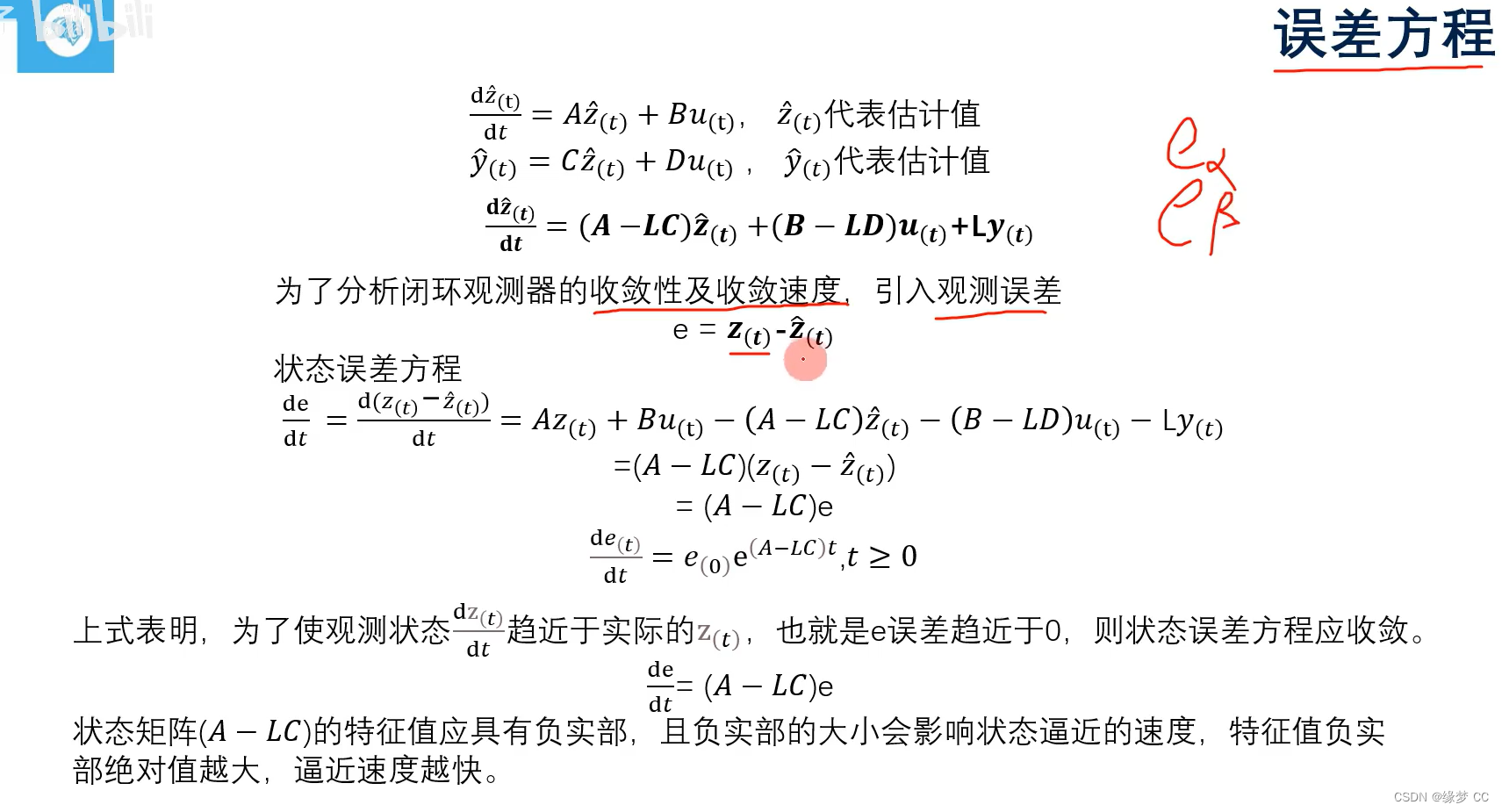
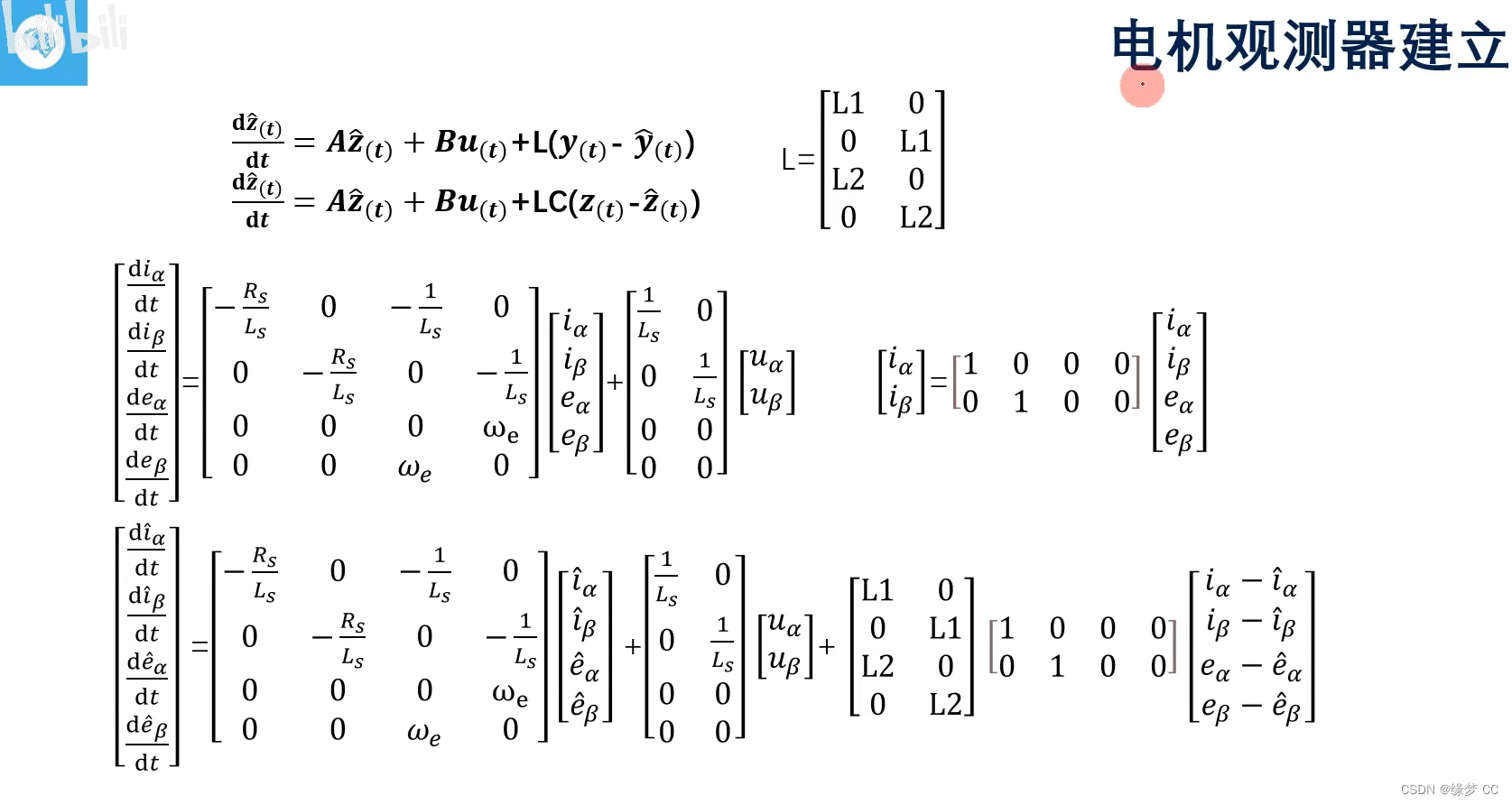
五、状态观测器理论
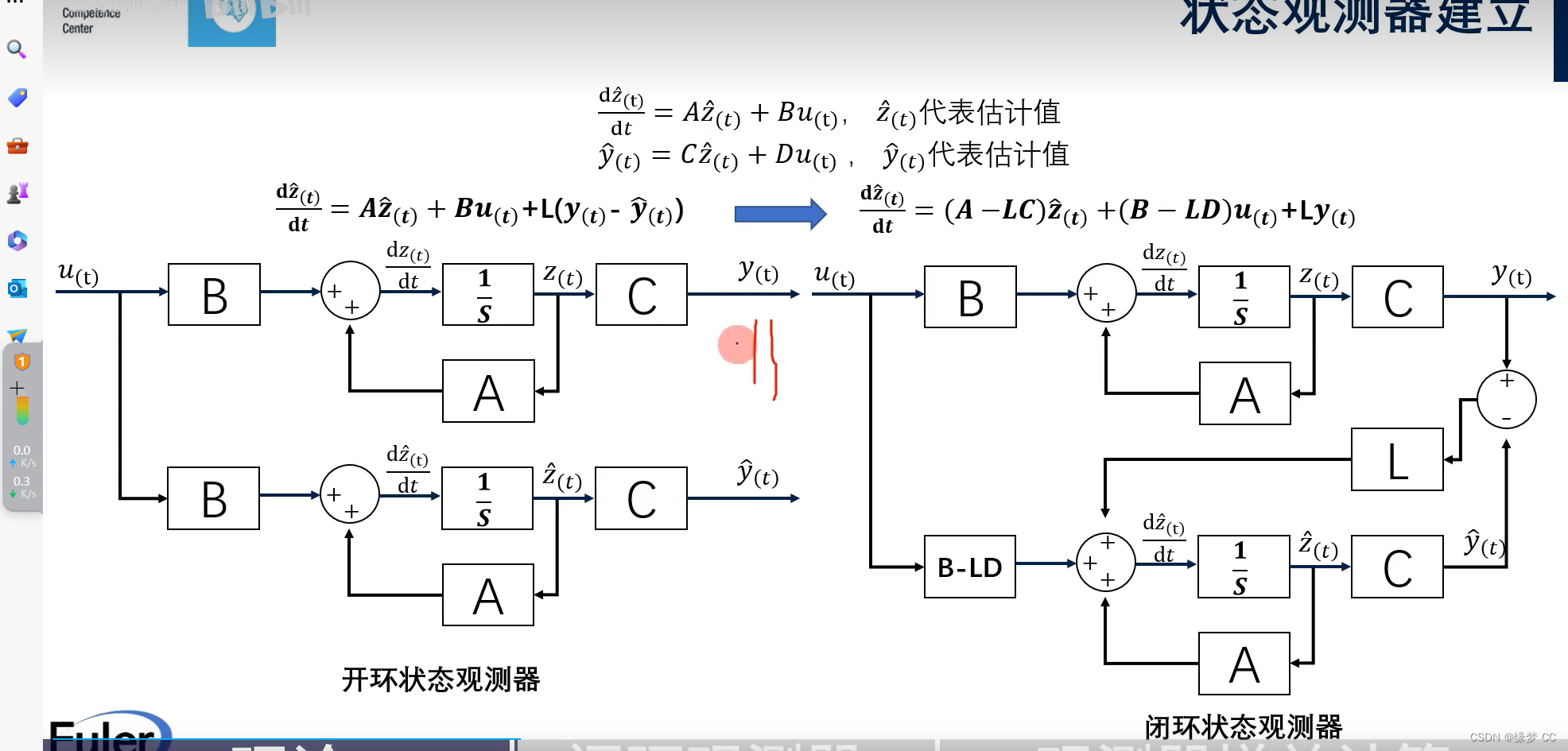
L:是指观测矩阵
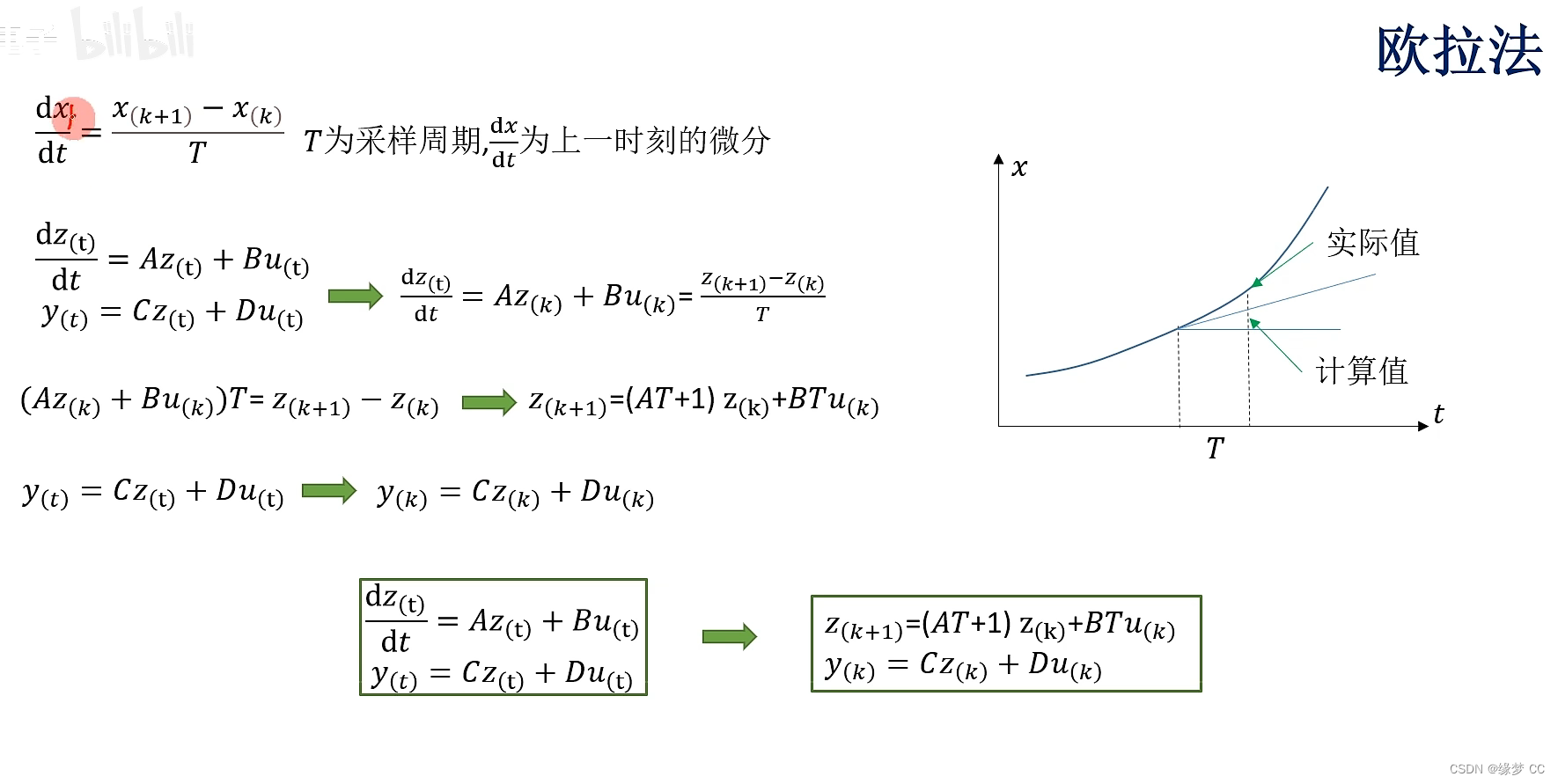
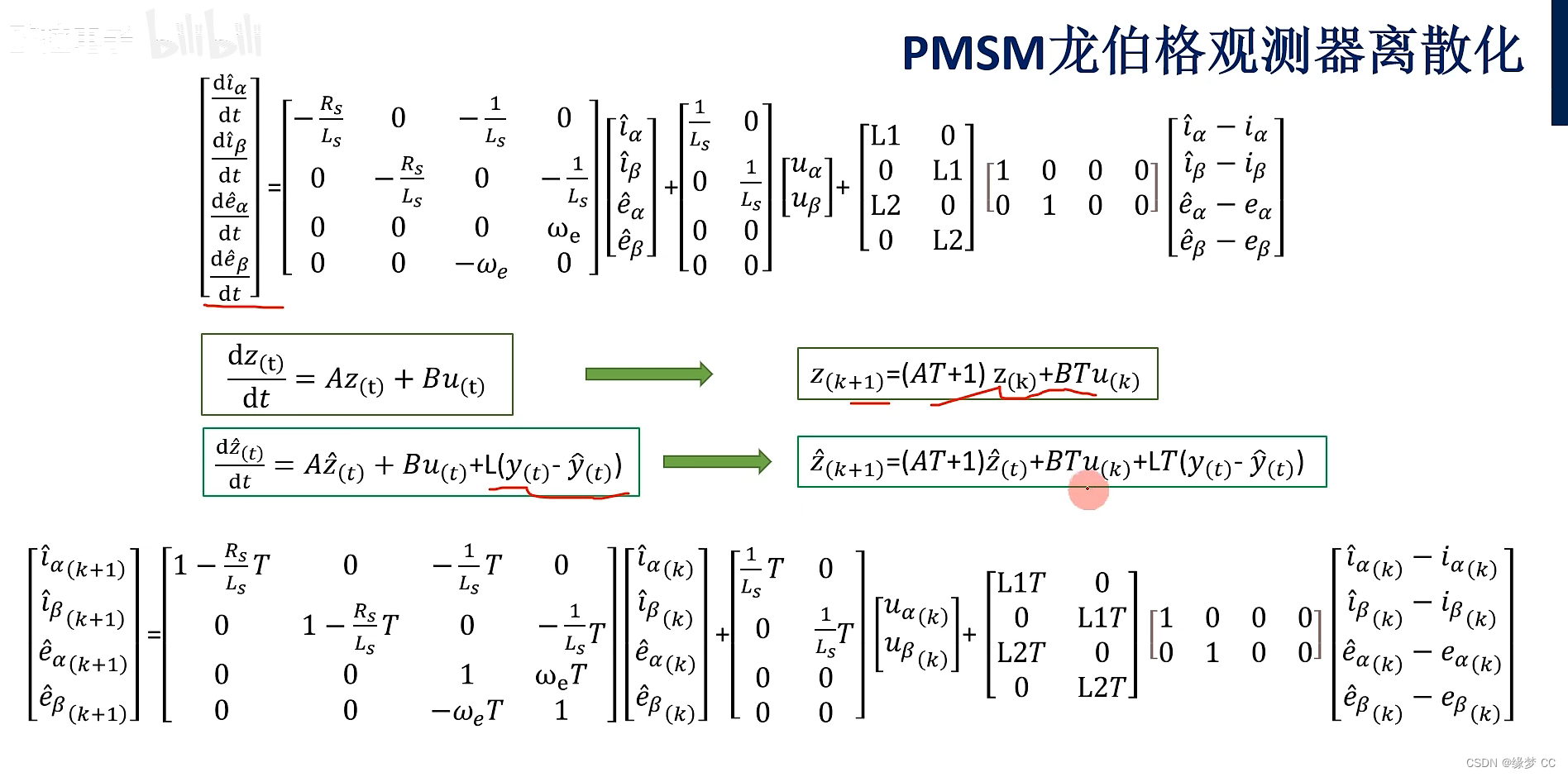
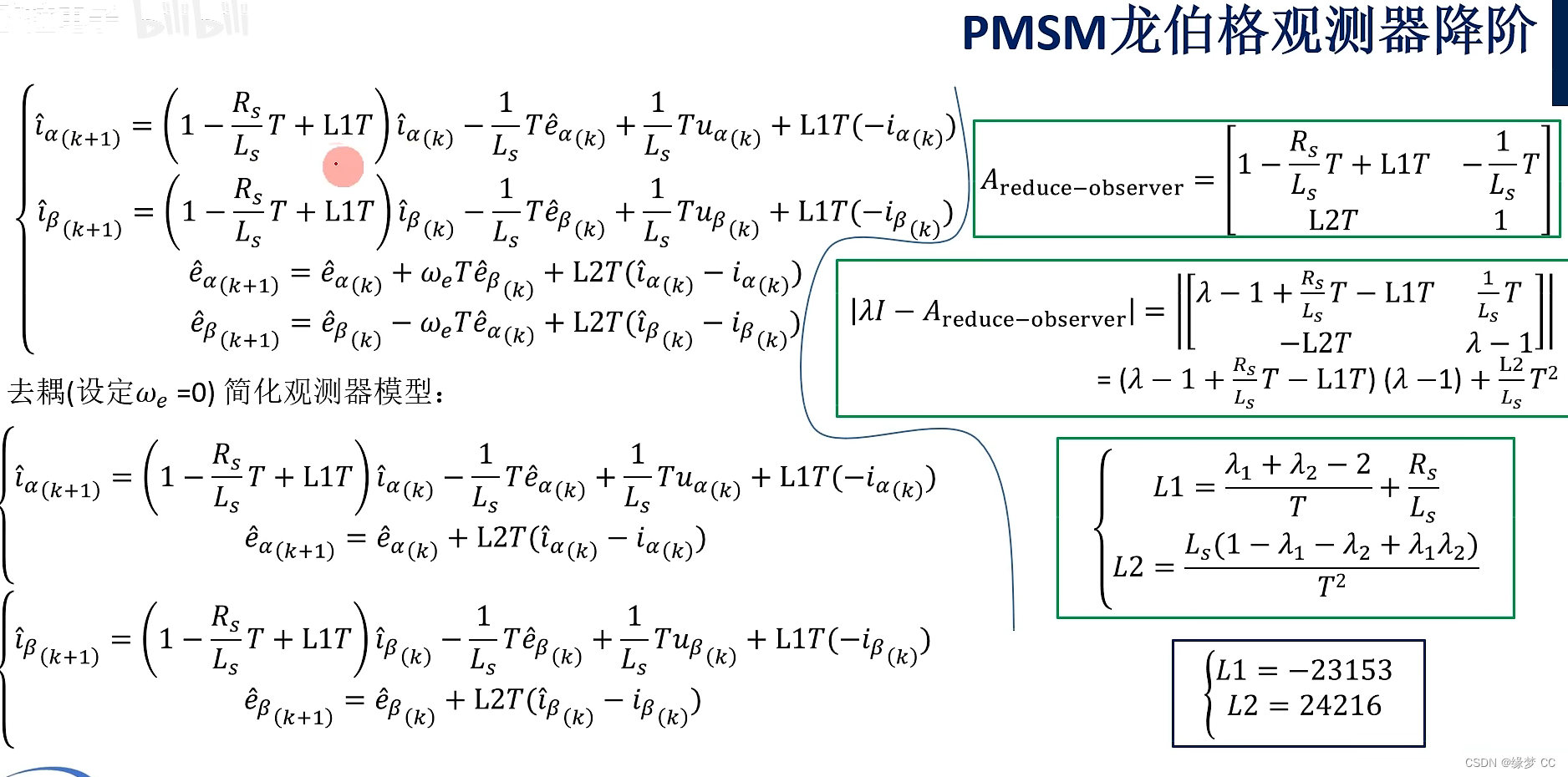
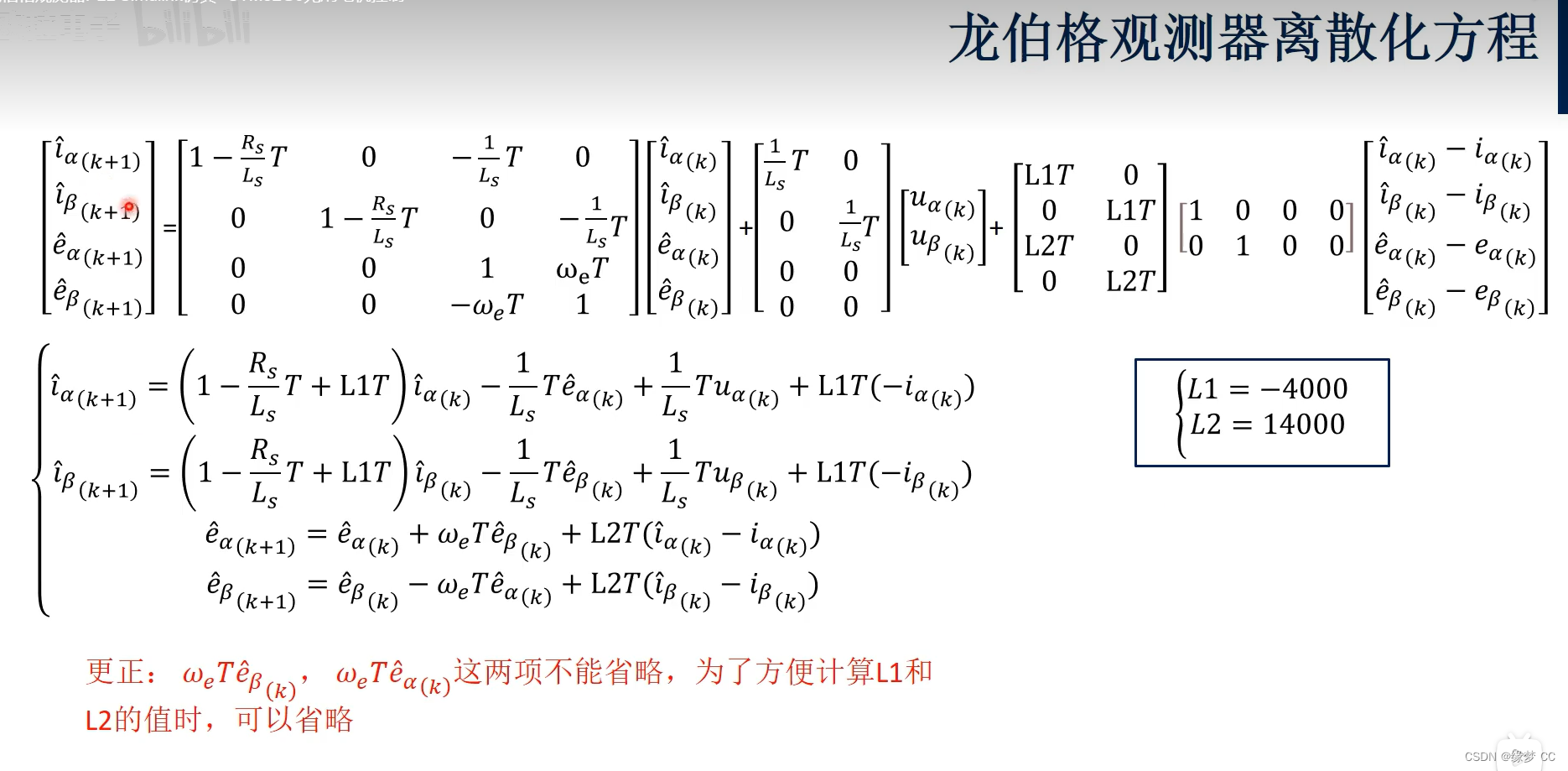
六、观测器离散化
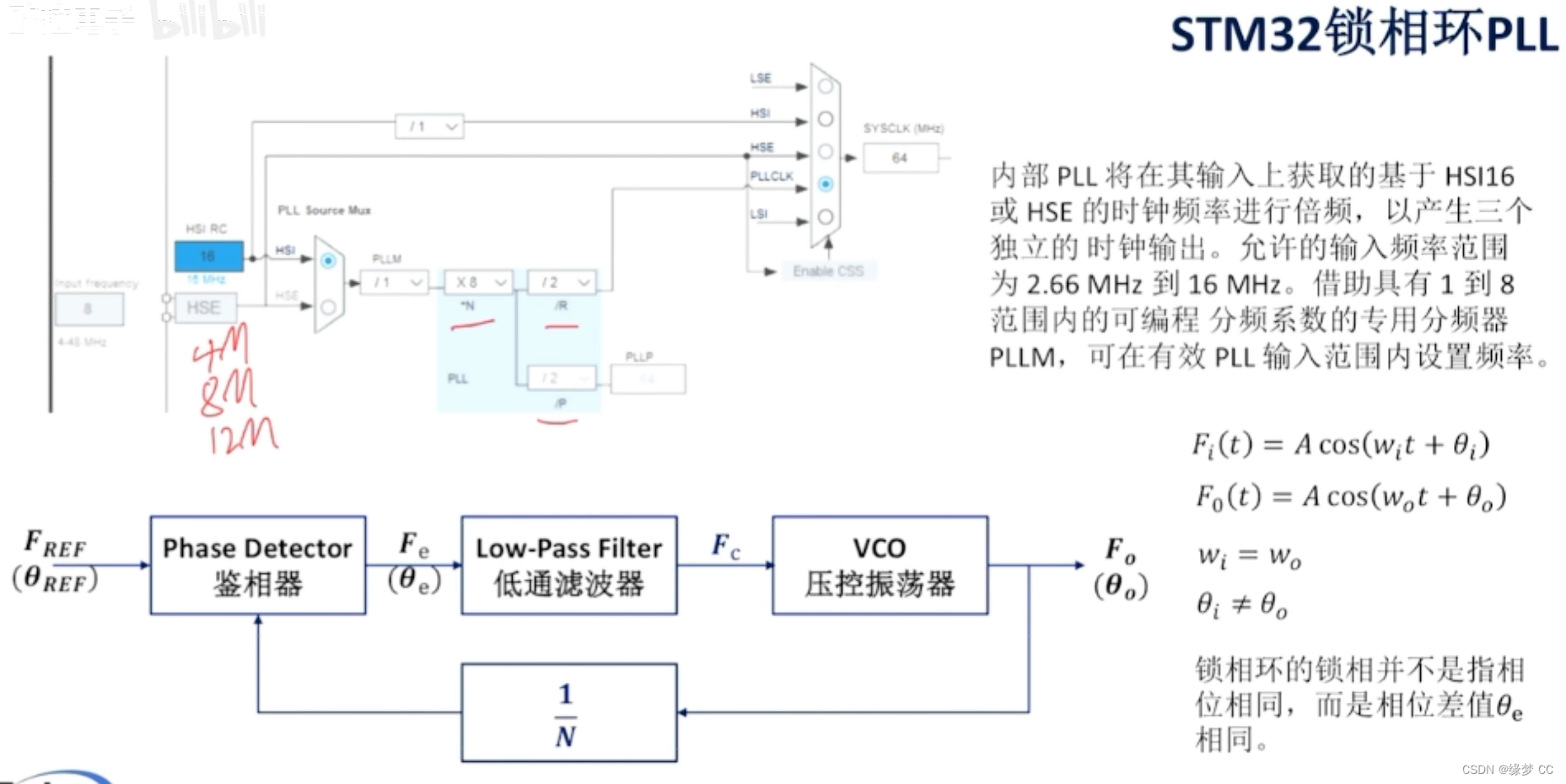
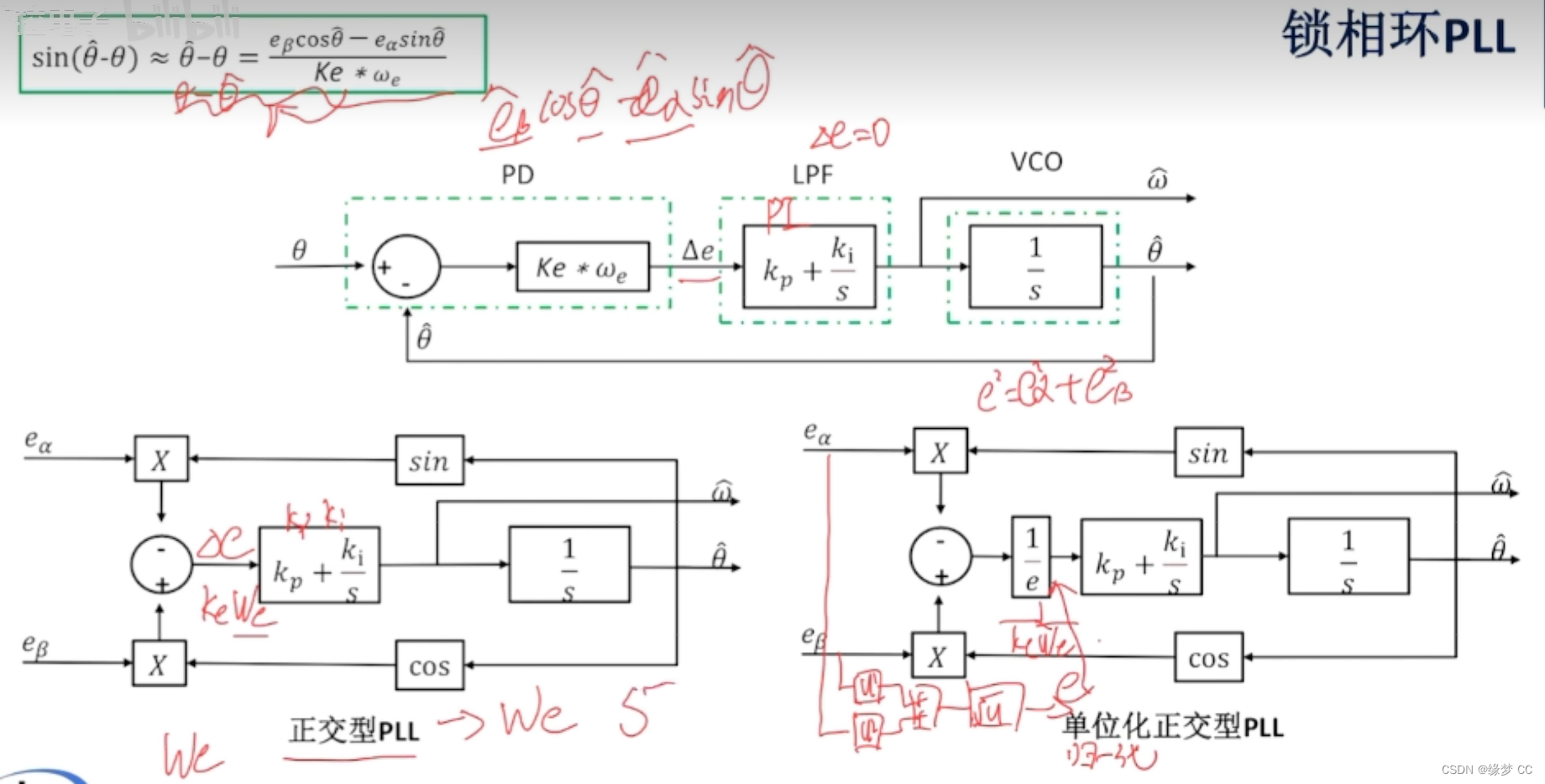
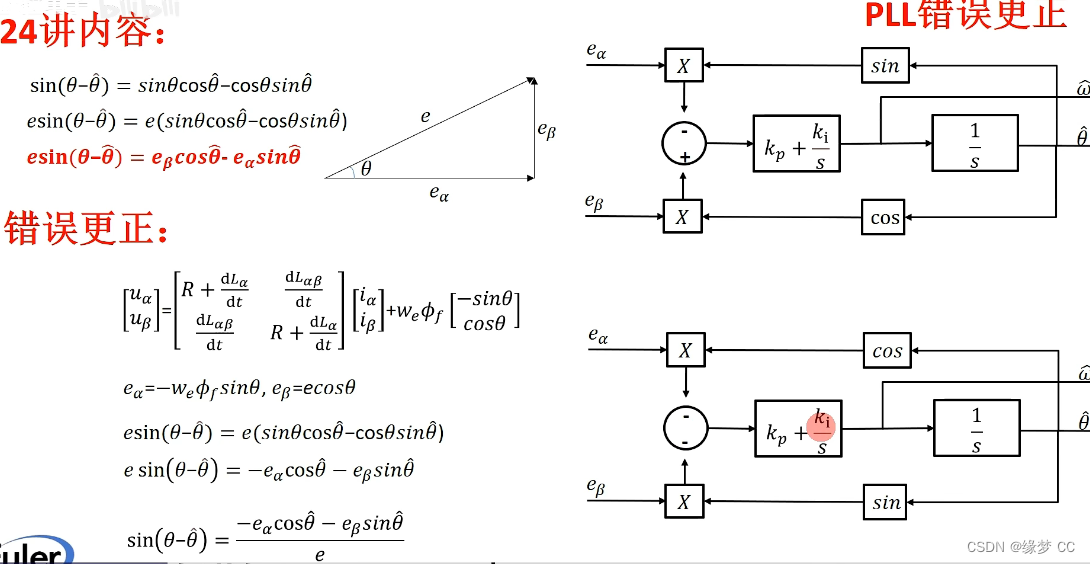
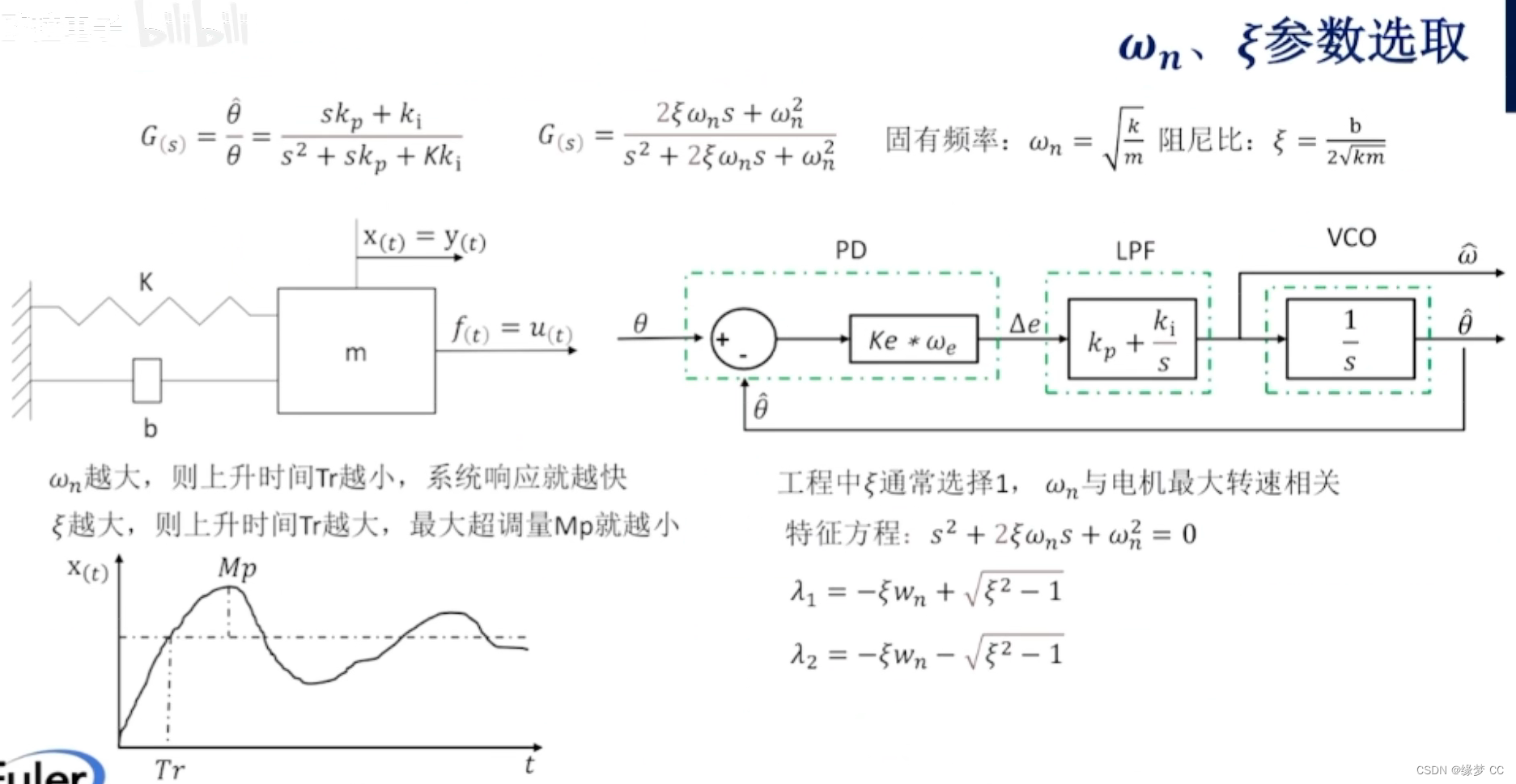
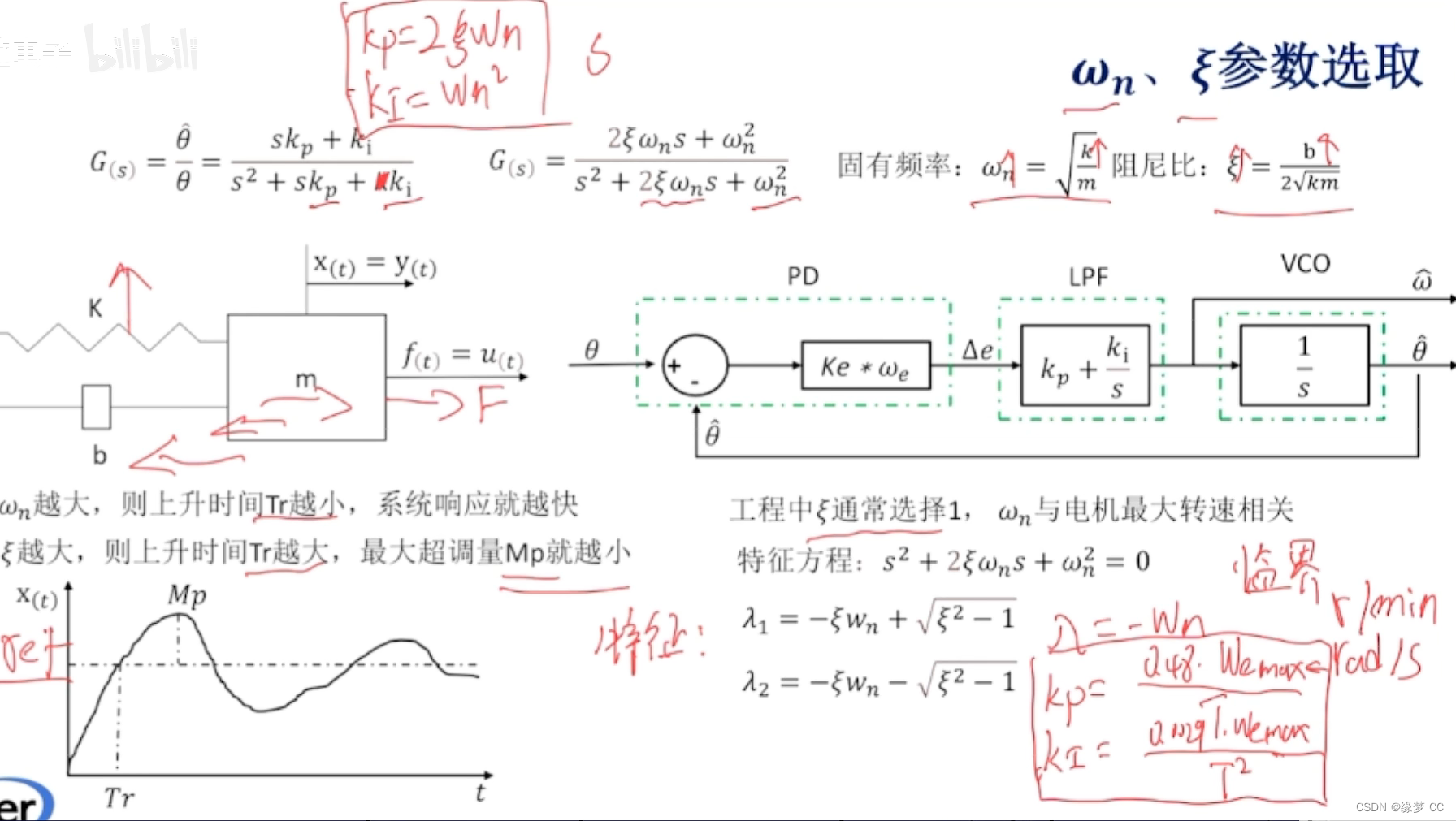
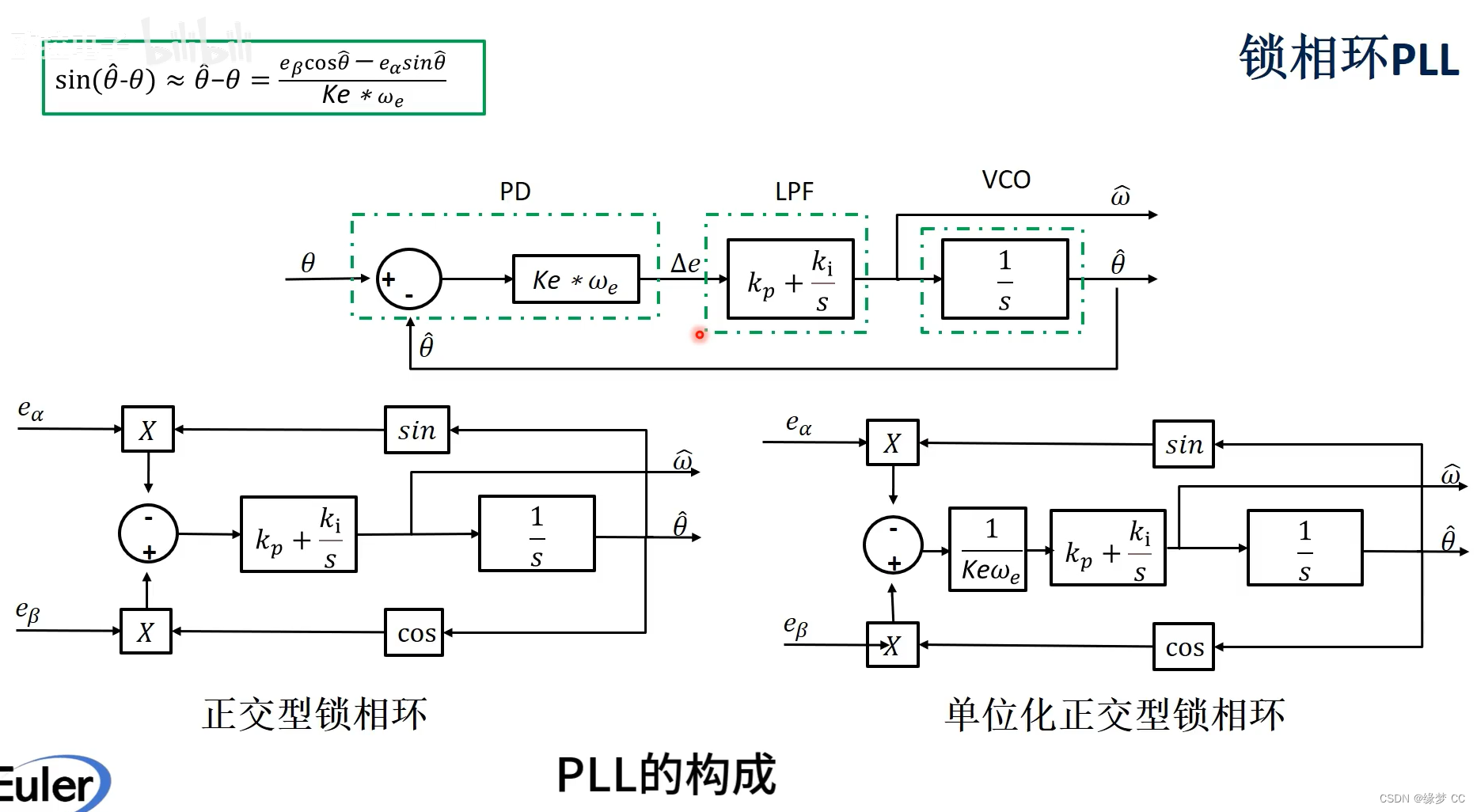
七、锁相环PLL
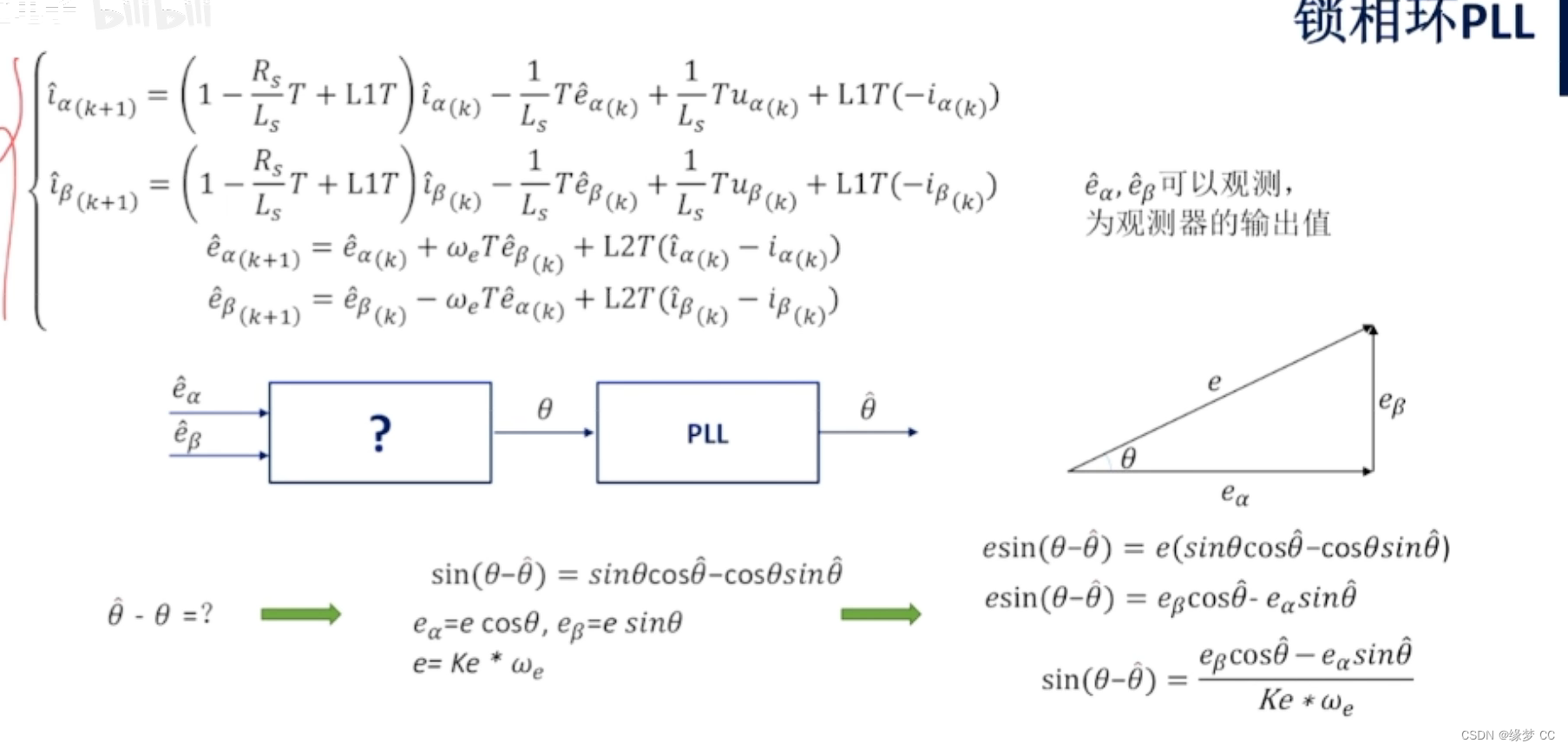
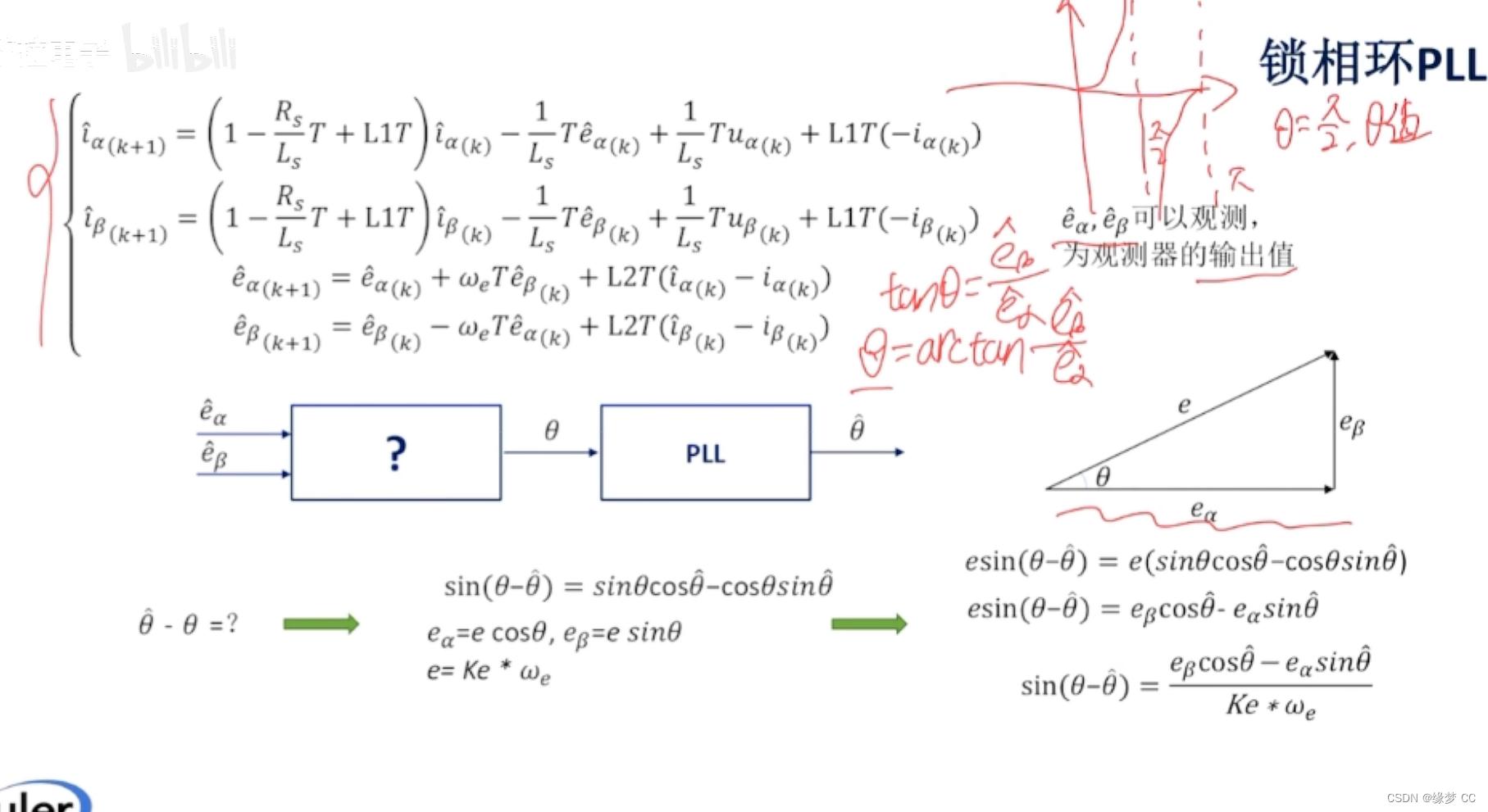
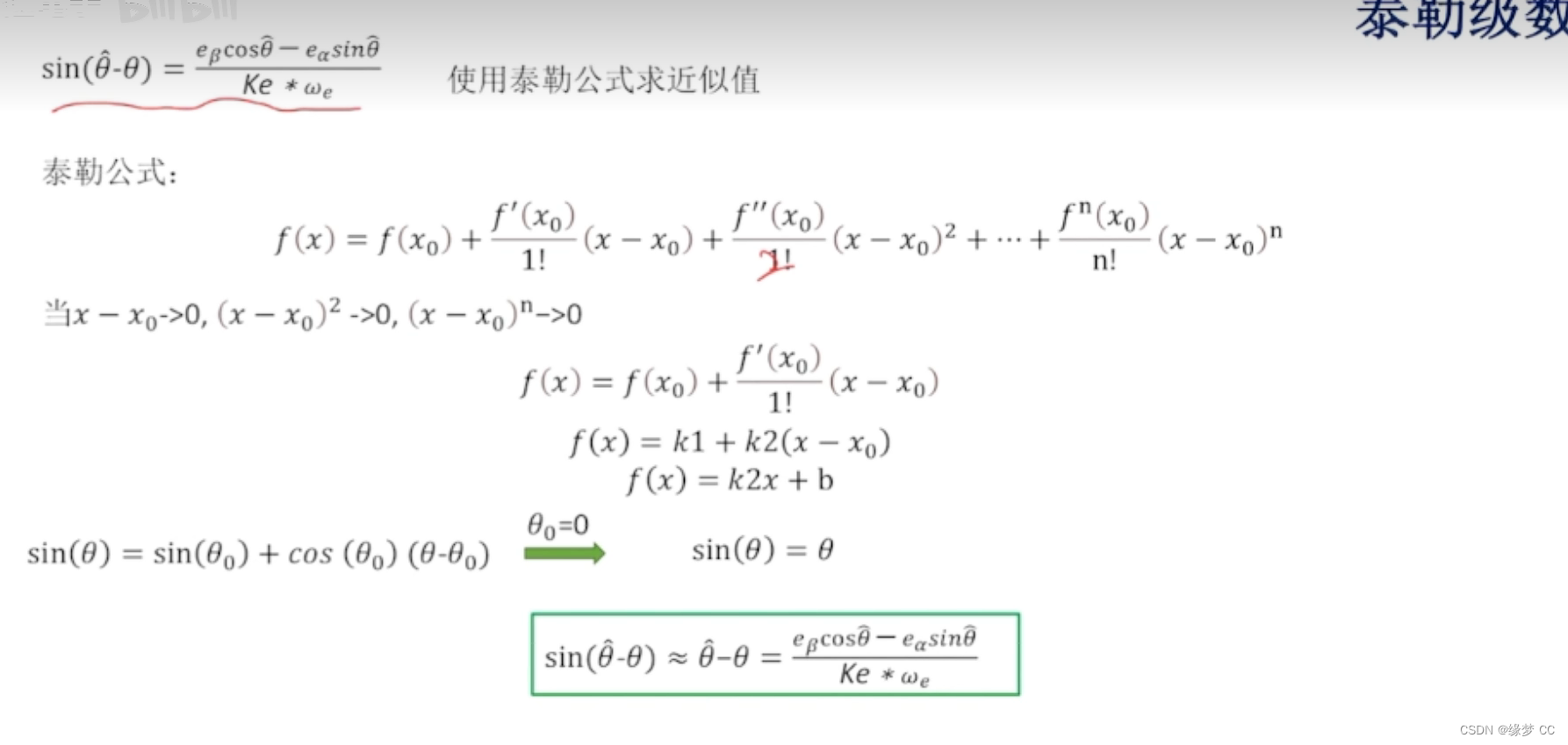

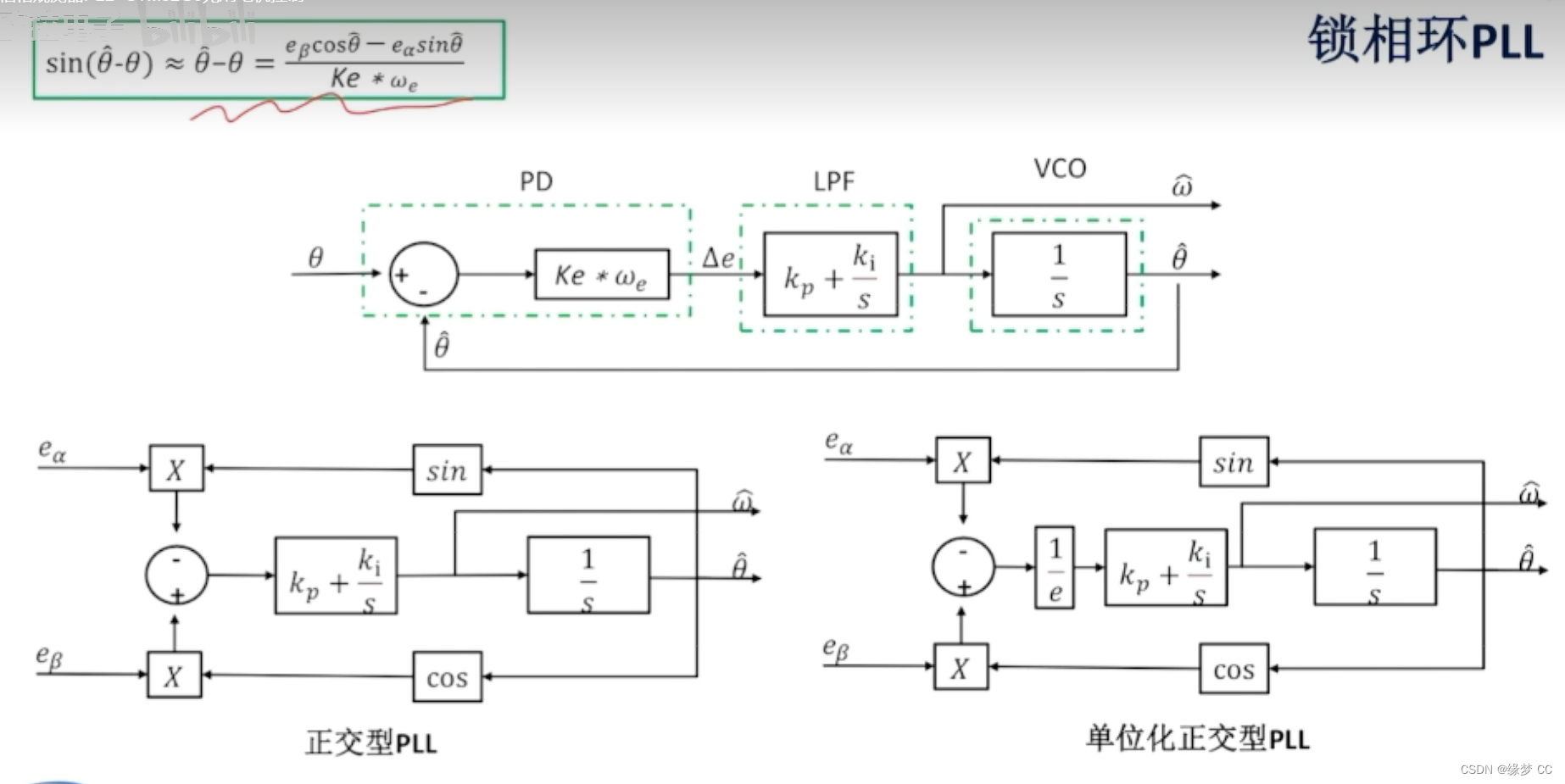 正交型锁相环受到Ke、We的影响
正交型锁相环受到Ke、We的影响
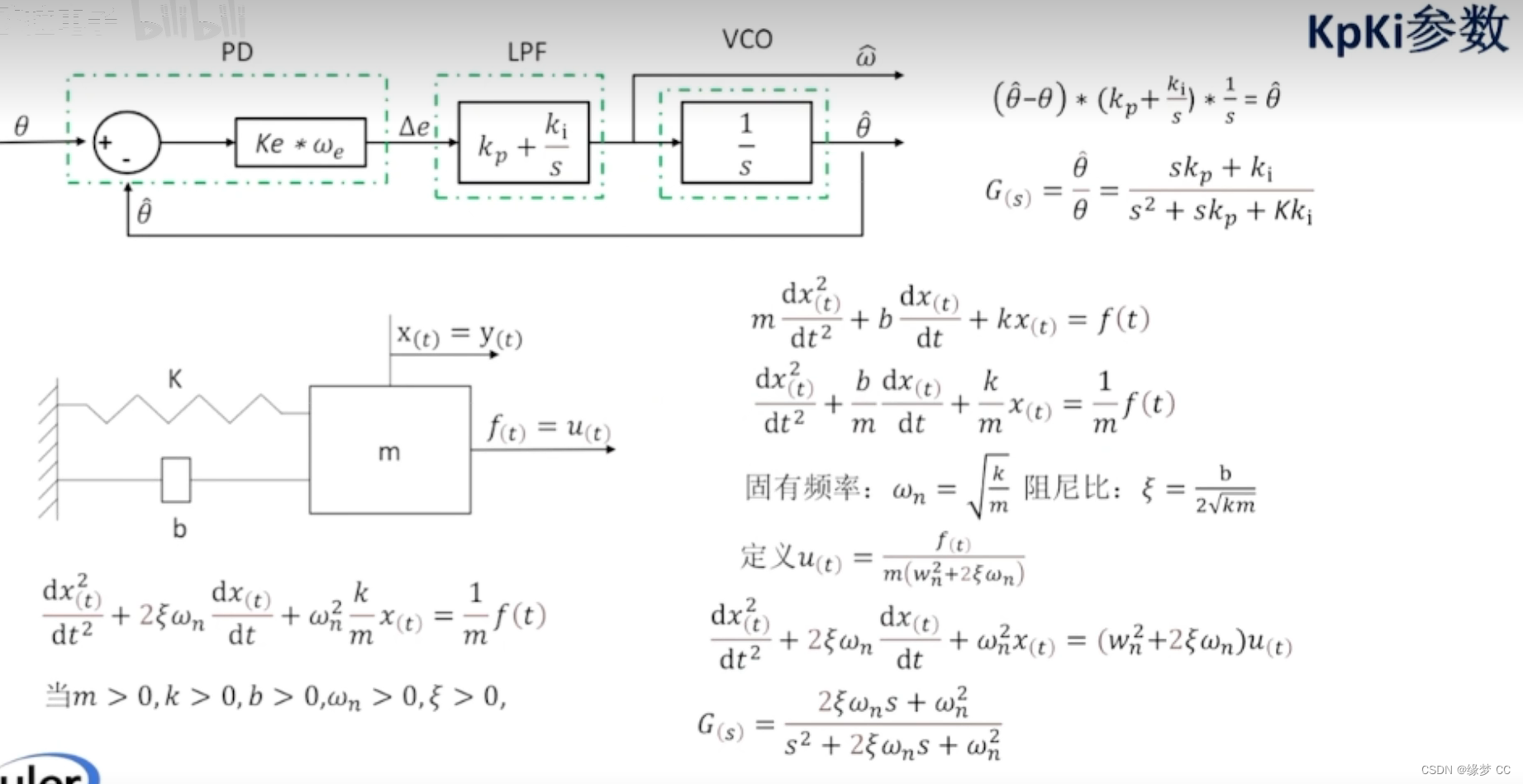
八、建立simulink仿真
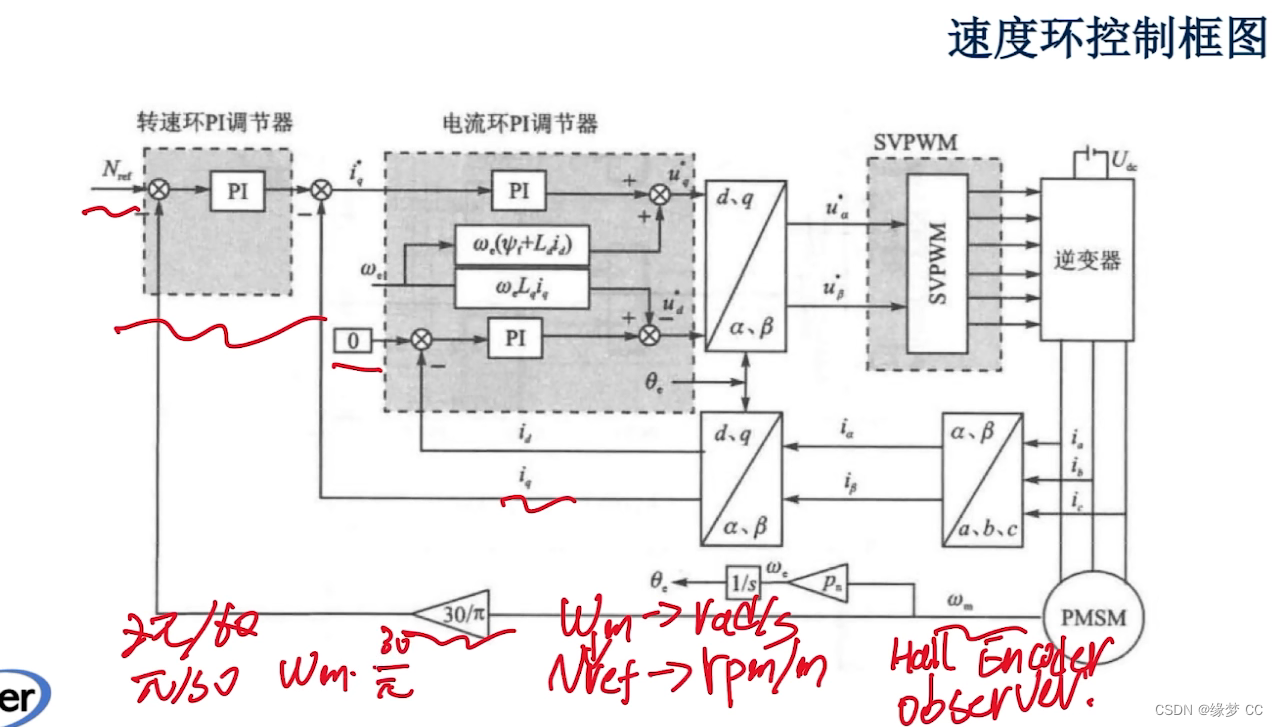
九、速度环
通过求解A矩阵的特征值来判断,整个系统是否稳定。
L:是指观测矩阵
正交型锁相环受到Ke、We的影响
 2004
8396
1044
7043
2004
8396
1044
7043

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























