









[现代控制理论]11_现代控制理论串讲_完结_pdf获取
[现代控制理论]10_可观测性与分离原理_观测器与控制器
[现代控制理论]9_状态观测器设计_龙伯格观测器
[现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink
[现代控制理论]8_LQR控制器_simulink
[现代控制理论]7_线性控制器设计_Linear Controller Design
[现代控制理论]6_稳定性_李雅普诺夫_Lyapunov
[现代控制理论]5_系统的可控性_controllability
[现代控制理论]4_PhasePortrait爱情故事动态系统分析
[现代控制理论]3_Phase_portrait 相图 相轨迹
[工程数学]1_特征值与特征向量
[现代控制理论]2_state-space状态空间方程
我将之前的笔记合并生成了pdf,如果有有需要,可以关注公众号“王崇卫”,在后台输入“DR_CAN笔记”。
Observer Design
-
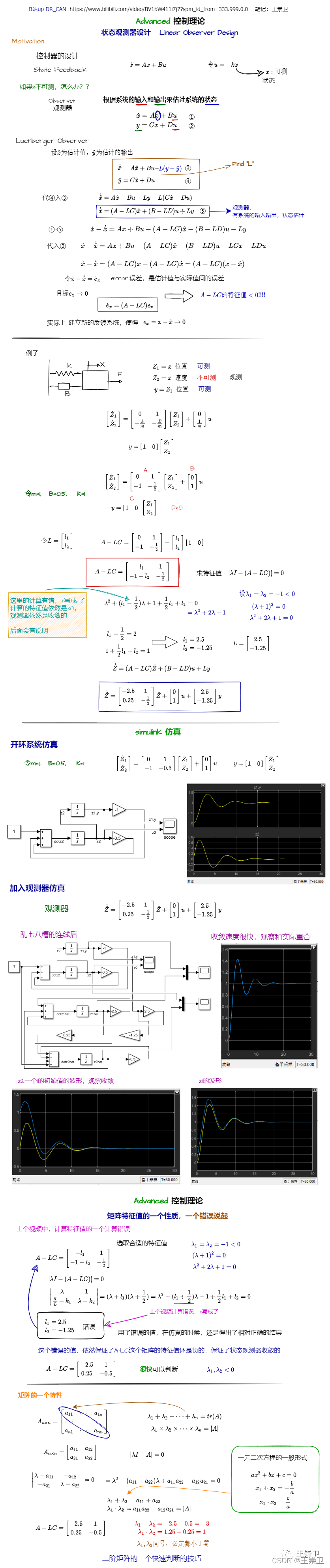
在控制器的设计,是在系统状态可测的情况下,设计u=-kx的负反馈控制。如果系统中有状态是不可测的,怎么办?
-
引入观测器,根据系统的输入和输出来估计系统的状态。
-
隆伯格观测器的推导,设计状态输出估计值,引入error,发现观测器是建立新的反馈系统使得e=x-xhat =0。即使得新的状态空间方程的A-LC矩阵的特征值小于0。
-
以弹簧阻尼系统为例,设计状态观测器,并进行了simulink的仿真实验和验证,观测器的效果。
-
设计小于0的特征值计算L时有个符号错误,但是实际的特征值还是小于0 ,系统收敛的。
-
矩阵的一个特性:特征值的和=tr(A),特征值的积=|A|。
-
二阶矩阵可以依据这个特性快速判断特征值的符号,即快速判断系统是否收敛。
DR_CAN 观测器视频链接
https://www.bilibili.com/video/BV1bW411i7j7?spm_id_from=333.999.0.0


















 7588
7588

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









