







点云预处理是处理点云数据时的重要部分,其目的是提高点云数据的质量和处理效率。通过去除离群点、减少点云密度和增强特征,可以消除噪声、减少计算量、提高算法的准确性和鲁棒性,从而为后续的点云处理和分析步骤(如配准、分割和重建)提供更高质量的数据基础。
以下是常用的点云预处理算法介绍,内容包括离群点过滤、点云下采样、坐标上采样和特征上采样的数学原理以及Open3D实现代码。
离群点过滤
无效值剔除
无效值剔除是指移除点云中的值或无穷大的值。
数学原理: 假设点云数据集为,其中每个点。无效值剔除的规则可以表示为:
Open3D实现:
import open3d as o3d
def remove_invalid_points(pcd):
pcd = pcd.select_by_index(
np.where(np.isfinite(np.asarray(pcd.points)).all(axis=1))[0]
)
return pcd
# 示例
pcd = o3d.io.read_point_cloud("example.ply")
pcd = remove_invalid_points(pcd)
o3d.visualization.draw_geometries([pcd])
统计方法剔除
统计方法剔除利用每个点的邻域统计信息来识别并移除离群点。
数学原理: 计算每个点到其个最近邻点的平均距离,并将该点的平均距离与全局平均距离进行比较。如果某点的平均距离超出某一阈值,则认为该点为离群点。
Open3D实现:
def statistical_outlier_removal(pcd, nb_neighbors=20, std_ratio=2.0):
cl, ind = pcd.remove_statistical_outlier(nb_neighbors=nb_neighbors, std_ratio=std_ratio)
pcd = pcd.select_by_index(ind)
return pcd
# 示例
pcd = o3d.io.read_point_cloud("example.ply")
pcd = statistical_outlier_removal(pcd)
o3d.visualization.draw_geometries([pcd])
半径滤波方法剔除
半径滤波方法根据每个点在指定半径内的邻居数量来剔除离群点。
数学原理: 设定一个半径和最小点数阈值。对于每个点,如果其在半径内的邻居数量少于,则认为该点为离群点。
Open3D实现:
def radius_outlier_removal(pcd, radius=0.05, min_points=5):
cl, ind = pcd.remove_radius_outlier(nb_points=min_points, radius=radius)
pcd = pcd.select_by_index(ind)
return pcd
# 示例
pcd = o3d.io.read_point_cloud("example.ply")
pcd = radius_outlier_removal(pcd)
o3d.visualization.draw_geometries([pcd])
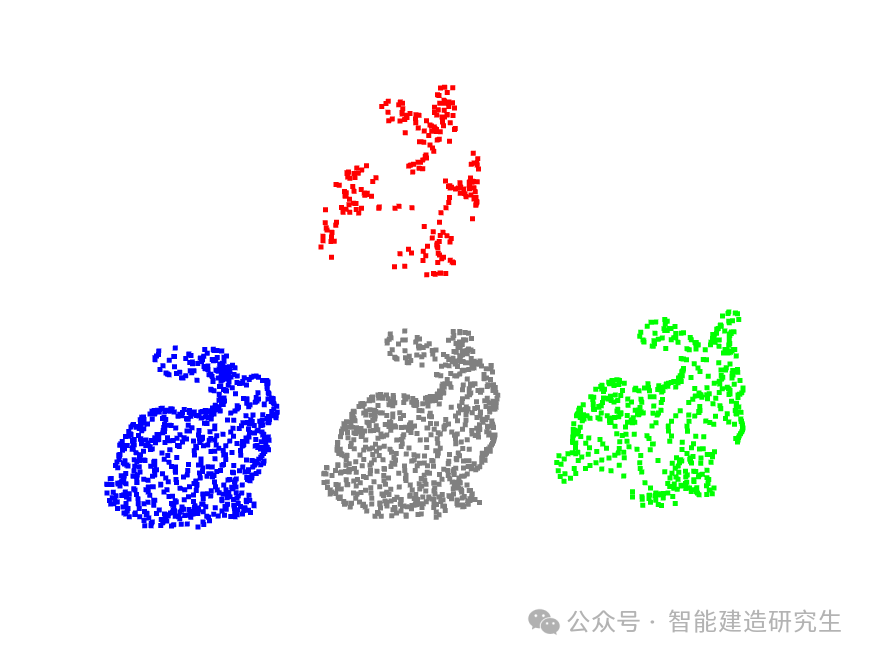
离群点剔除代码示例:
import open3d as o3d
from copy import deepcopy
import numpy as np
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(50)#每50个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
#剔除无效值
pcd1 = deepcopy(pcd)
pcd1.paint_uniform_color([0, 0, 1])#指定显示为蓝色
pcd1.translate((20, 0, 0)) #整体进行x轴方向平移
pcd1 = pcd1.remove_non_finite_points(True, True)#剔除无效值
print(pcd1)
#统计方法剔除
pcd2 = deepcopy(pcd)
pcd2.paint_uniform_color([0, 1, 0])#指定显示为蓝色
pcd2.translate((-20, 0, 0)) #整体进行x轴方向平移
res = pcd2.remove_statistical_outlier(20, 0.5)#统计方法剔除
pcd2 = res[0]#返回点云,和点云索引
print(pcd2)
#半径方法剔除
pcd3 = deepcopy(pcd)
pcd3.paint_uniform_color([1, 0, 0])#指定显示为蓝色
pcd3.translate((0, 20, 0)) #整体进行y轴方向平移
res = pcd3.remove_radius_outlier(nb_points=20, radius=2)#半径方法剔除
pcd3 = res[0]#返回点云,和点云索引
print(pcd3)
# # 点云显示
o3d.visualization.draw_geometries([pcd, pcd1, pcd2, pcd3], #点云列表
window_name="离群点剔除",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度
点云下采样
点云下采样的主要目的是减少点云数据的规模,从而降低计算复杂度和存储需求。在实际应用中,点云数据通常包含大量的点,这会占用大量的存储空间并增加处理时间。通过下采样,可以去除冗余点,只保留关键点,既能加速后续处理(如配准、分类、分割等),又能减少内存使用。此外,下采样还能提高算法的鲁棒性,减少噪声影响,使得处理结果更加稳定和可靠。
体素下采样
体素下采样通过将点云划分为固定大小的三维网格,并用每个网格中的点的质心来代表该网格中的所有点。
数学原理: 设定体素网格的大小为,将点云划分为体素网格,每个体素中的点用其质心替代。
其中,为体素的质心,为体素中的点数。
Open3D实现:
import open3d as o3d
from copy import deepcopy
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
pcd1.paint_uniform_color([0, 0, 1])#指定显示为蓝色
pcd1.translate((20, 0, 0)) #整体进行x轴方向平移
pcd1 = pcd1.voxel_down_sample(voxel_size=1)
print(pcd1)
pcd2 = deepcopy(pcd)
pcd2.paint_uniform_color([0, 1, 0])#指定显示为绿色
pcd2.translate((0, 20, 0)) #整体进行y轴方向平移
res = pcd2.voxel_down_sample_and_trace(1, min_bound=pcd2.get_min_bound()-0.5, max_bound=pcd2.get_max_bound()+0.5, approximate_class=True)
pcd2 = res[0]
print(pcd2)
# 点云显示
o3d.visualization.draw_geometries([pcd, pcd1, pcd2], #点云列表
window_name="体素下采样",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度

随机下采样
随机下采样是从点云中随机选取一定比例的点,以减少点云的点数。
数学原理: 设点云数据集为,随机下采样从中选取个点。其中,是从中随机选取的索引。
Open3D实现:
import open3d as o3d
from copy import deepcopy
import numpy as np
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
pcd1.paint_uniform_color([0, 0, 1])#指定显示为蓝色
pcd1.translate((20, 0, 0)) #整体进行x轴方向平移
pcd1 = pcd1.uniform_down_sample(100)#每100个点采样一次
print(pcd1)
pcd2 = deepcopy(pcd)
pcd2.paint_uniform_color([0, 1, 0])#指定显示为绿色
pcd2.translate((0, 20, 0)) #整体进行y轴方向平移
pcd2 = pcd2.random_down_sample(0.1)#采1/10的点云
print(pcd2)
#自定义随机采样
pcd3 = deepcopy(pcd)
pcd3.translate((-20, 0, 0)) #整体进行x轴方向平移
points = np.array(pcd3.points)
n = np.random.choice(len(points), 500, replace=False) #s随机采500个数据,这种随机方式也可以自己定义
pcd3.points = o3d.utility.Vector3dVector(points[n])
pcd3.paint_uniform_color([1, 0, 0])#指定显示为红色
print(pcd3)
# # 点云显示
o3d.visualization.draw_geometries([pcd, pcd1, pcd2, pcd3], #点云列表

均匀下采样
均匀下采样是等间距选择点云中的点。
数学原理: 设点云数据集为,均匀下采样每隔个点选择一个点。
Open3D实现:
def uniform_downsample(pcd, every_k_points=10):
pcd = pcd.uniform_down_sample(every_k_points)
return pcd
# 示例
pcd = o3d.io.read_point_cloud("example.ply")
pcd = uniform_downsample(pcd)
o3d.visualization.draw_geometries([pcd])
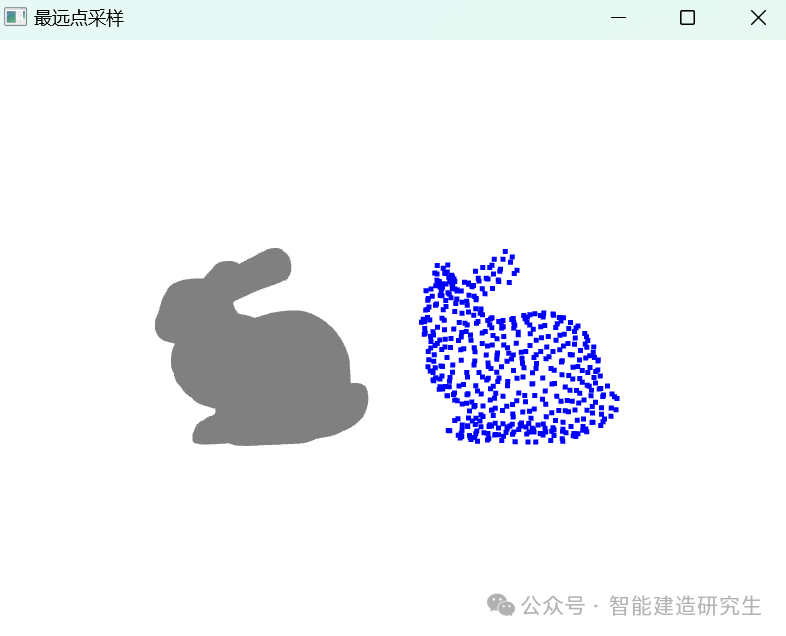
最远点采样
最远点采样是一种迭代方法,每次选择距离当前已选点集最远的点。
数学原理: 初始化点集为随机选择的一个点,每次迭代选择距离当前已选点集最远的点:
Open3D实现:
import open3d as o3d
from copy import deepcopy
import numpy as np
def farthest_point_sample(point, npoint):
"""
Input:
xyz: pointcloud data, [N, D]
npoint: number of samples
Return:
centroids: sampled pointcloud index, [npoint, D]
"""
N, D = point.shape
xyz = point[:,:3]
centroids = np.zeros((npoint,))
distance = np.ones((N,)) * 1e10
farthest = np.random.randint(0, N)
for i in range(npoint):
centroids[i] = farthest
centroid = xyz[farthest, :]
dist = np.sum((xyz - centroid) ** 2, -1)
mask = dist < distance
distance[mask] = dist[mask]
farthest = np.argmax(distance, -1)
point = point[centroids.astype(np.int32)]
return point
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
pcd1.translate((20, 0, 0)) #整体进行x轴方向平移
points = np.array(pcd1.points)
points = farthest_point_sample(points, 500)
pcd1 = o3d.geometry.PointCloud()
pcd1.points = o3d.utility.Vector3dVector(points)
pcd1.paint_uniform_color([0, 0, 1])#指定显示为蓝色
print(pcd1)
# # 点云显示
o3d.visualization.draw_geometries([pcd, pcd1], #点云列表
window_name="最远点采样",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度
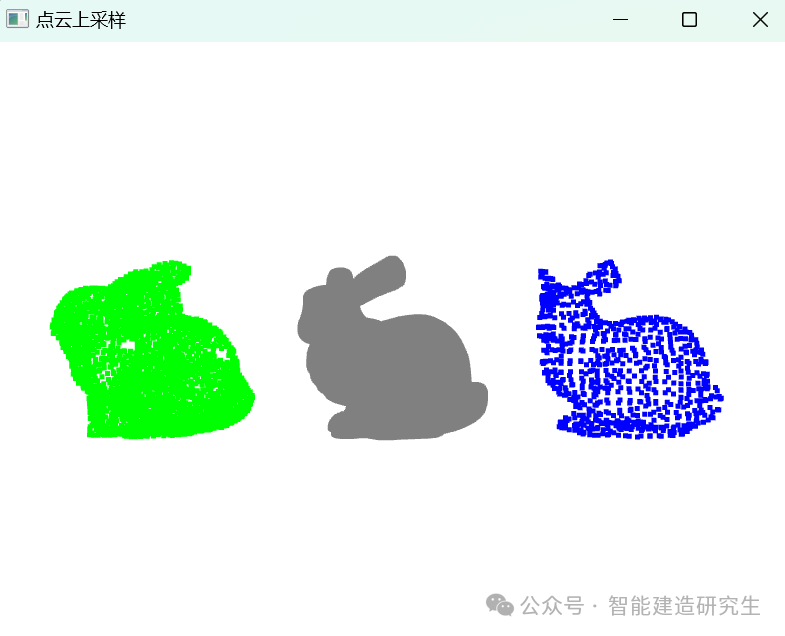
坐标上采样
点云上采样的目的是增加点云的密度,以提高其分辨率和细节表现。在许多应用中,特别是三维重建和表面细化时,原始点云的分辨率可能不足,导致重建结果不够精细或存在明显的缺陷。通过上采样,可以插值生成更多的点,使得点云更密集,从而更好地捕捉物体的几何细节,提升最终的三维模型质量。这对于需要高精度、高分辨率数据的任务(如精细的表面重建、细节检测等)尤为重要。
插值法
插值法是通过插值计算新增点的坐标。
数学原理: 常用的插值方法包括线性插值、双线性插值、三次样条插值等。以线性插值为例,两个点和之间新增点:
其中,为插值系数,取值范围为[0, 1]。
Open3D实现:
import open3d as o3d
from copy import deepcopy
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
pcd1.paint_uniform_color([0, 0, 1]) # 指定显示为蓝色
pcd1.translate((20, 0, 0)) # 整体进行x轴方向平移
pcd1 = pcd1.voxel_down_sample(voxel_size=1)
print(pcd1)
mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(pcd1, alpha=2)
pcd2 = mesh.sample_points_poisson_disk(number_of_points=3000, init_factor=5)
pcd2.paint_uniform_color([0, 1, 0]) # 指定显示为绿色
pcd2.translate((-40, 0, 0)) # 整体进行x轴方向平移
print(pcd2)
o3d.visualization.draw_geometries([pcd, pcd1, pcd2], # 点云列表
window_name="点云上采样",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度
特征上采样
最近邻插值
最近邻插值是通过选择最近邻的特征值作为新增点的特征值。
数学原理: 设已知点云的特征为,新增点的特征值通过最近邻点的特征值确定:,其中,为距离最近的点。
Open3D实现:
from sklearn.neighbors import NearestNeighbors
def nearest_neighbor_interpolation(pcd, features, num_points):
points = np.asarray(pcd.points)
new_points = np.array([]).reshape(0, 3)
new_features = np.array([]).reshape(0, features.shape[1])
for i in range(len(points) - 1):
for t in np.linspace(0, 1, num_points):
new_point = points[i] + t * (points[i + 1] - points[i])
new_points = np.vstack((new_points, new_point))
nn = NearestNeighbors(n_neighbors=1).fit(points)
distances, indices = nn.kneighbors(new_points)
new_features = features[indices.flatten()]
pcd_interpolated = o3d.geometry.PointCloud()
pcd_interpolated.points = o3d.utility.Vector3dVector(new_points)
return pcd_interpolated, new_features
# 示例
pcd = o3d.io.read_point_cloud("example.ply")
features = np.random.rand(len(pcd.points), 3) # 假设特征是随机生成的
pcd, new_features = nearest_neighbor_interpolation(pcd, features, num_points=10)
o3d.visualization.draw_geometries([pcd])
以上内容总结自网络,如有帮助欢迎关注与转发,我们下次再见!















 1547
1547











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









