







点云是由一组三维空间中的点组成的数据结构,常用于计算机视觉、3D建模和地形图生成等领域。每个点包含空间坐标(x, y, z)以及其他属性(如颜色、密度等)。以下是一些重要的点云概念:
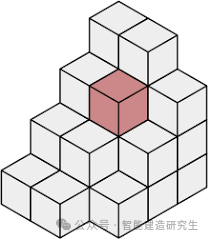
1. 体素 (Voxel)
体素是三维空间中的一个立方体单元,类似于二维图像中的像素。体素化是将点云数据划分为一系列小立方体,每个体素内的点可以用其质心或平均值来表示。体素化有助于减少数据量并保持空间结构。
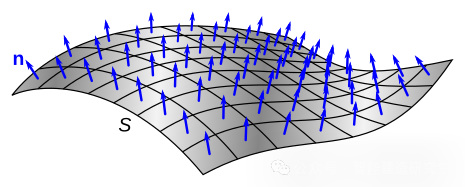
2. 法向量 (Normal Vector)
法向量是指向点云表面垂直的向量,通常用于描述表面方向和形状。计算法向量有助于理解点云的几何结构,广泛应用于3D重建和表面分析。
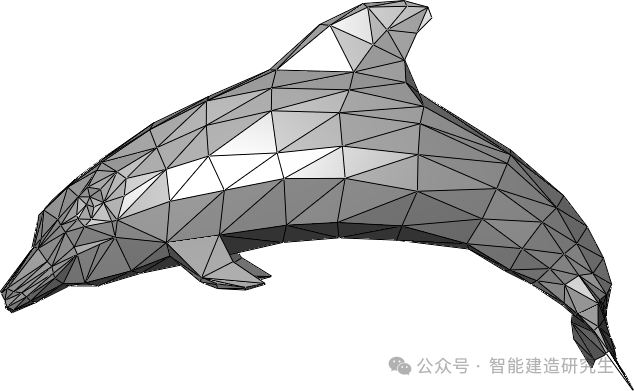
3. 三角面 (Triangle Mesh)
三角面是由三点连接形成的平面,在点云处理中用于表示表面。通过三角面,可以将点云转换为网格模型,便于进一步处理和分析。
4. 质心 (Centroid)
质心是指一个体素或一组点的中心点,通常通过计算所有点的平均值来确定。在点云处理中,质心用于简化和抽象点云数据。
5. 倒角距离 (Chamfer Distance)
倒角距离是一种度量点云之间相似性的方法,计算两个点云中每个点到最近点的距离的总和,常用于点云匹配和比较。
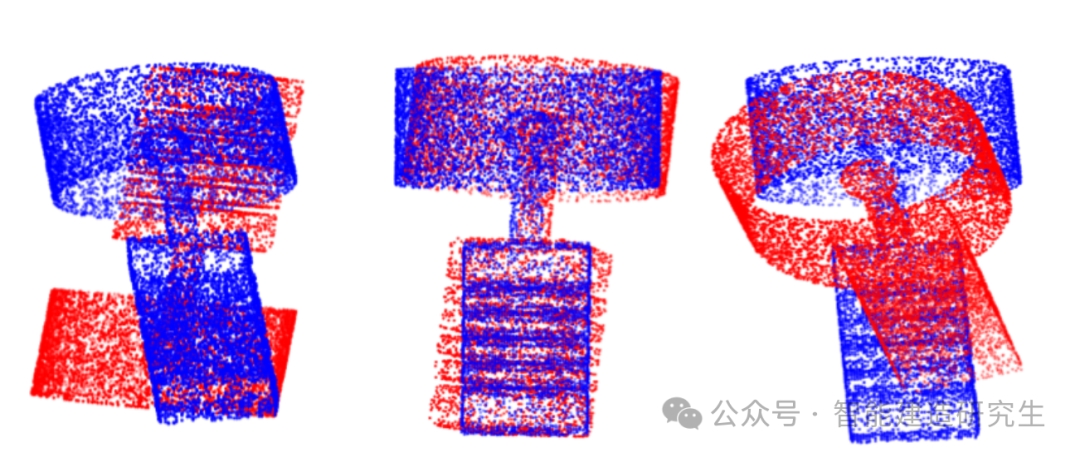
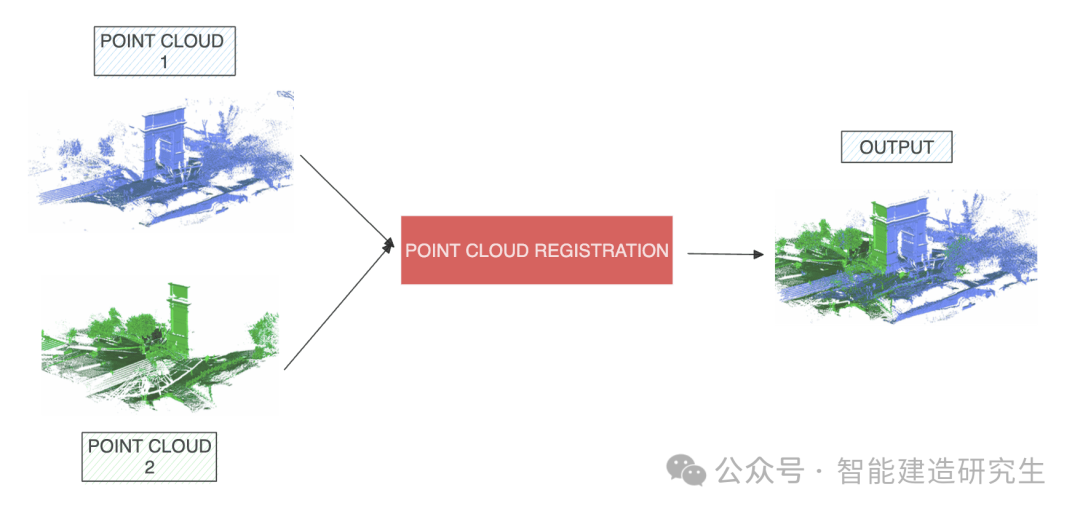
6. 点云配准 (Point Cloud Registration)
点云配准是将多个点云对齐到同一坐标系的过程,常用于3D重建。常用算法包括ICP(Iterative Closest Point)和NDT(Normal Distributions Transform)。
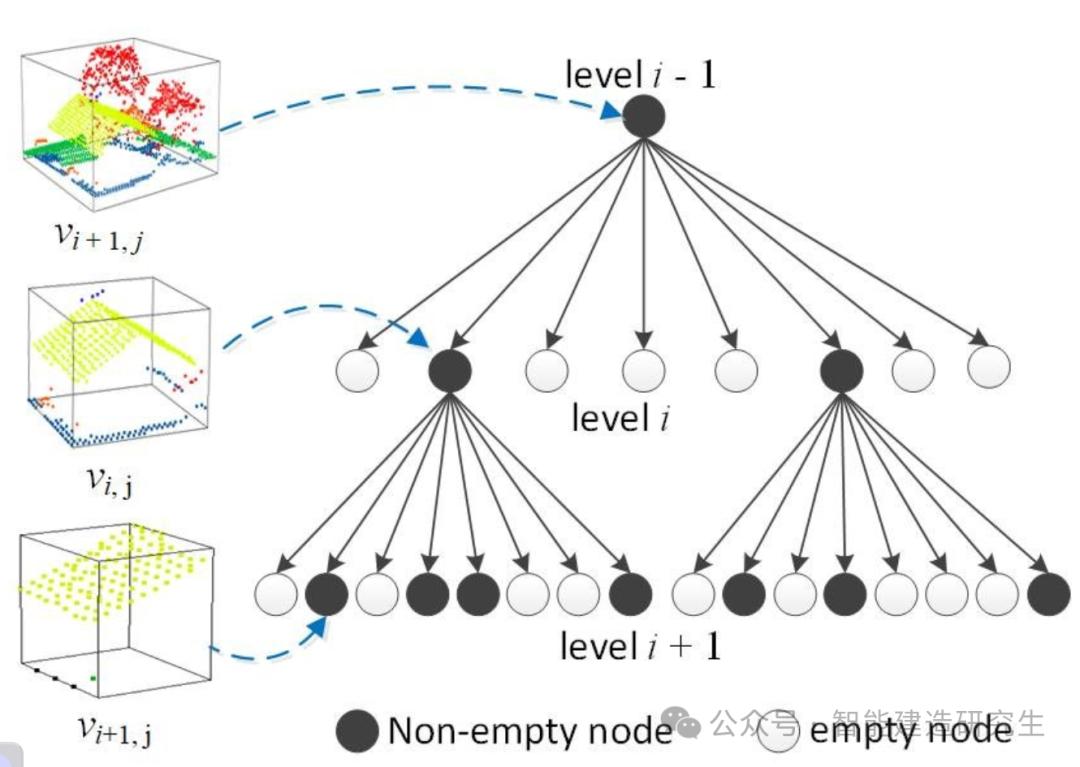
7. 八叉树 (Octree)
八叉树是一种空间分割数据结构,通过递归划分空间成八个子立方体,用于高效管理和查询三维空间中的点。
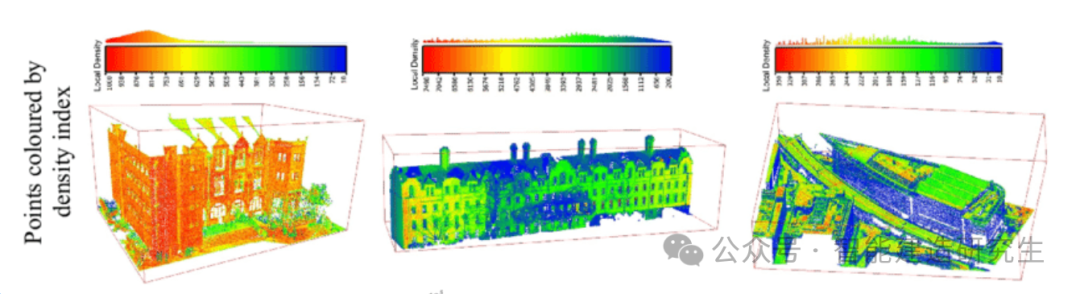
8. 密度估计 (Density Estimation)
密度估计用于测量点云中某一区域内点的密集程度,帮助识别和过滤噪声点,改进点云质量。
这些概念和工具构成了点云处理的重要基础,广泛应用于计算机视觉、机器人学、3D建模和地理信息系统(GIS)等领域。通过这些技术,可以更高效地处理和分析三维空间数据,提升实际应用效果。
以上内容总结自网络,如有帮助欢迎关注与转发,我们下次再见!















 284
284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









