






 本文介绍了基于Matlab的模糊自适应PID控制器的仿真方法,利用Simulink进行模型构建,强调了其在处理复杂系统中的优势。通过位置式PID和模糊控制,实现控制性能的优化和参数调整。
本文介绍了基于Matlab的模糊自适应PID控制器的仿真方法,利用Simulink进行模型构建,强调了其在处理复杂系统中的优势。通过位置式PID和模糊控制,实现控制性能的优化和参数调整。
基于Matlab的模糊自适应PID控制器仿真算法,MATLAB SIMULINK 实现,位置式PID,提供源码
ID:6150644830663348
Sky-monster
基于Matlab的模糊自适应PID控制器仿真算法是一种在控制系统中广泛应用的技术。在实际工程中,PID控制器可以通过对过程的反馈进行调整,使得系统输出能够稳定地接近设定目标。然而,传统的PID控制器在面对复杂、非线性的系统时会存在一些问题,例如系统参数变化引起的性能下降,控制精度不高等。
为了解决这些问题,模糊自适应PID控制器被提出并得到了广泛研究与应用。该算法结合了模糊控制和PID控制的优势,具有良好的鲁棒性和自适应性,能够适应不同工况下的控制需求。
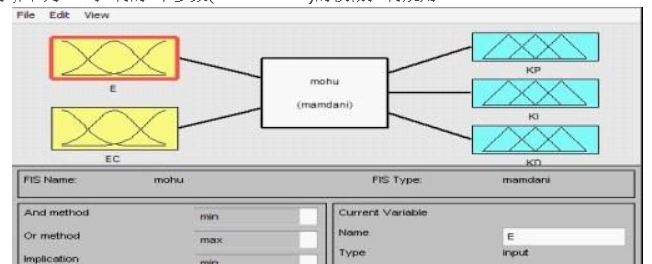
Matlab作为一种强大的数学建模与仿真软件,提供了强大的工具和函数库来支持模糊自适应PID控制器的仿真实现。其中,Simulink是Matlab中的一个重要模块,可以用于建立系统模型并进行仿真。通过Matlab Simulink,我们可以直观地观察控制器的性能,并对其参数进行调整,以达到最佳的控制效果。
在具体实现方面,模糊自适应PID控制器可以采用位置式PID控制方法。位置式PID控制器以系统的位置信息作为输入,通过计算位置误差和误差的积分、微分来得到最终的控制输出。模糊控制则通过模糊化、模糊推理和解模糊化等步骤来进行系统建模和控制规则的设计。
在实际仿真过程中,我们可以通过提供源码来展示算法的具体实现。这样,读者可以更好地理解算法的原理和实现细节,并在自己的应用场景中进行调整和优化。同时,为了更好地展示算法的性能,我们可以设计多个仿真实验,并对不同的参数进行测试和分析,以评估算法的控制效果和鲁棒性。
总之,基于Matlab的模糊自适应PID控制器仿真算法在控制系统中具有重要的应用价值。通过Matlab Simulink的支持,我们可以方便地实现算法的仿真和调试,为工程实践提供了有力的支持。希望本文可以为读者提供一些有价值的思路和方法,使他们在控制系统设计和优化中有所启发。
以上相关代码,程序地址:http://matup.cn/644830663348.html















 1669
1669

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









