







中风和脊髓损伤是导致下肢运动功能障碍的两大主要原因.中风又称脑卒中,是一种急性的脑血管疾病,其发病突然并且难以预测.它能够造成永久性的大脑神经损伤,致残率一直居高不下,幸存的患者常常会遭受后遗症的折磨,偏瘫就是其中最为常见一种.根据卫生部的统计数据显示,2011年,在我国40岁以上的人群中,新发缺血性脑卒中的人数约为133.4万,标化发病率约为230/10万人,并且正在以每年将近9%的速率在上升;截至到2012年底,我国脑卒中标化患病率约为1.82%,40岁以上的罹患人群高达1036万人,其中65岁以下人群约占50%,年轻化趋势严重.在幸存的脑卒中患者中,大约有75%的人不同程度地丧失了劳动或生活自理能力,其中40%左右的患者重度致残.目前,脑卒中已经成为我国60岁以上人群残疾的第一位原因.脊髓损伤则通常是由严重的脊柱外伤造成,各种意外事故都有可能导致脊髓损伤的发生.和中风一样,脊髓损伤有着很高的致残率,可能导致截瘫、四肢瘫等病症,严重妨碍了患者的日常生活活动.根据2006年的统计数据显示,全世界脊髓损伤的患病率为233∼755/100万,每年的发病率为10.4∼83/100万.中国康复研究中心和北京卫生信息中心公布的北京市脊髓损伤发病率调查报告显示,20世纪80年代末北京市脊髓损伤发病率仅为6.8/100万,而2002年则达到了60/100万,在14年时间里上升了7.82倍.
由于脑血管疾病的高发病率和频繁发生的各种意外事故,中国的瘫痪患者数量与日俱增.根据第二次全国残疾人抽样调查和第六次全国人口普查的数据推算,2013年中国的肢体残疾者数量达到了3700万,占全国人口的2.65%,平均年增长率为6.30%.然而,与庞大的康复医疗需求相矛盾的是,可用的康复医疗资源相对有限.中国现阶段需要康复治疗师约11.47万人,人才缺口达10.09万人,开设康复医学科的综合医院仅有3288家,占全国综合医院总数的24.6%,其中只有一半开设康复病区.2002年的统计数据显示,只有1.5%的脊髓损伤患者能够接受康复治疗.
针对瘫痪患者,在经过诸如外科手术等急性期的临床处理后,康复成为主要的一种治疗手段,它能够帮助患肢恢复运动功能,重新学习日常生活活动,从而尽最大可能地帮助患者回归正常生活.这通常都是一个相当长期的持续过程,有时甚至可能贯穿患者一生的时间.在传统的康复治疗手段中,患者的运动训练主要依靠理疗师的手动辅助,一般比较耗时,成本也相对较高;并且由于主动训练难以手动实现,所以患肢的运动基本上都是被动的,训练策略比较单一;此外,在训练过程中,患肢的运动轨迹以及施加在患肢上的力度往往难以保持良好的一致性.而使用康复机器人辅助患者运动训练则可以提高效率、降低成本,并能够实现多种不同的主被动训练策略,同时机器人的运动轨迹和施加在患肢上的力度具备良好的一致性.
除了上面提到的不足,传统的训练手段还很消耗患者和理疗师的体力,尤其是下肢的康复运动,因此,患者常常无法获得足够频次和强度的运动训练,每次的训练也都无法持续足够长的时间.康复机器人则可以减轻治疗过程中患者和理疗师体力负担,从而提高了康复训练的频率和持续时间.以常见的减重步行训练为例,在传统的方法中,至少需要三个理疗师才能完成一次步态训练,其中一位负责支撑患者的体重,剩下的两位各负责患者一条下肢的运动.然而,悬吊减重式步态训练机器人能够实现与传统方法几乎相同的康复效果,但却大大地降低了所需的体力付出,整个步态训练过程只需要一个理疗师进行少量的协助和在旁监护即可.显然,步态机器人可以显著地增加患者的练习次数以及每次持续的时间.因此,相对于传统理疗,使用机器人辅助瘫痪患者进行康复显然是一种更加优越的训练方法.
本文系统地回顾了下肢康复机器人的发展现状以及机器人和患者之间的交互控制方法.文章后面的几个章节安排如下:在第1节中将下肢康复机器人分为了4类,分别是坐卧式机器人、直立式机器人、辅助起立式机器人和多体位式机器人,文中对每类设备的功能特点和适用范围进行了总结.此外,针对每类下肢康复机器人,选择了目前有代表性的设备,概述了它们的机械结构、训练策略和临床实验,并分析了每款机器人的优缺点.第2节综述了机器人与患者之间的交互控制方法,详细介绍了基于力信号的交互控制以及基于生物医学信号的交互控制.最后一节在总结全文的基础上,讨论了下肢康复机器人未来的发展趋势.
1下肢康复机器人
目前,关于下肢康复机器人的概念,还没有一个标准通用的叙述.但是根据普遍公认的理解,下肢康复机器人就是能够辅助下肢运动功能受损的瘫痪患者自动或半自动完成康复训练的机电一体化设备.它主要通过对患肢实施运动训练和功能性电刺激的方法,对患者受损的中枢神经形成反馈,刺激损伤神经的再生或者未损伤神经对损伤功能的代偿,以达到神经康复的目的.在过去十几年的时间里,由于医疗市场的广泛需求,以及机器人技术的快速发展,大量的研究机构和公司开始对下肢康复机器人进行开发研究,其中的一些研究成果已经成功地产品化.根据患者在康复训练中的身体姿态,下肢康复机器人大致分为以下4大类:坐卧式机器人、直立式机器人、辅助起立式机器人和多体位式机器人.
1.1坐卧式机器人
坐卧式下肢康复机器人最大的优势在于,在运动训练过程中,患者处于坐立、斜躺或平躺的姿态,无需下肢为身体提供支撑,因此它适用于运动功能完全丧失的瘫痪患者.但是对于已经能够部分自主控制下肢肌肉收缩的患者而言,坐卧的身体姿势不利于患肢步行功能的恢复.根据机构与患肢之间相互作用方式,坐卧式下肢康复机器人可以进一步细分为末端式和外骨骼式.
1.1.1末端式机器人
末端式机器人通常采用一对脚踏板与患者的双足相接触,除此之外机构和患者之间再无其他的相互作用点.这类机器人成本较低,易于操作使用,但只能实现相对简单的训练策略和末端运动轨迹,属于下肢康复机器人中的低端设备,多用于缓解瘫痪带来的关节僵硬、肌肉萎缩等并发症,康复效果非常有限.
电动踏车是目前最常使用的一种末端式下肢康复机器人,结构简单,单自由度驱动.在运动训练过程中,患者的双足放置于脚踏板上,进行固定轨迹的圆周运动,完成循环往复的踏车训练.
除了常见的踏车之外,一些研究机构还开发了其他不同形式的多自由度末端式机器人.哈尔滨工程大学研制了一款平躺式的下肢康复设备,它采用并联式的机械结构[12−13],共包含三个自由度,一个滑动关节实现两条腿循环往复的协调联动,两个旋转自由度用于调整运动训练过程中踝关节的角度.相较于踏车设备,该机器人在脚踏板处增加了两个独立驱动的旋转关节,实现了对踝关节角度的控制,但是下肢末端(脚踝处)的运动轨迹依然是固定的,并且目前只具备被动的康复训练策略.
Lambda是由瑞士洛桑联邦理工学院(EcolePolytechnique F´ed´erale de Lausanne)机器人系统实验室开发的末端式下肢康复机器人(图1),它采用形如λ的并联机械结构,左右两侧对称,每侧均为三自由度,包括两个平移关节和一个旋转关节.Lambda是目前末端式下肢康复机器人中自由度最多的设备,能够实现下肢髋膝踝关节在矢状面内的运动,末端轨迹可以在机器人的工作空间内自由规划,但是目前该设备还只能完成被动的运动训练,尚不具备主动康复训练的功能.

1.1.2外骨骼式机器人
外骨骼式下肢康复机器人的执行机构一般由两条机械腿组成,其结构类似于人体下肢,各个关节也与下肢的某些运动自由度一一对应.在训练过程中,下肢沿着机械腿并列进行安放固定,除了脚踏板与双足相接触外,在腿部也可能存在多处肢体与机构之间的交互点.外骨骼式下肢康复机器人既可以方便地实现单关节的运动,也能够完成多关节协调的训练,运动轨迹在工作空间内自由可编程,并具备多种主被动康复训练策略.
MotionMaker是由瑞士洛桑联邦理工学院(Ecole Polytechnique F´ed´erale de Lausanne)机器人系统实验室开发的坐卧式外骨骼下肢康复机器人(图2),并由瑞士公司Swortec产品化后推向市场.它由一张倾斜度可调的躺椅和两条三自由度的机械腿组成,可以完成下肢髋膝踝关节的屈伸运动.在训练过程中,患者仅有足部与脚踏板相接触,以模拟自然情况下地面与双足的相互作用.该设备最大的特点是集成了闭环控制的FES设备,能够实现运动训练与FES相结合的康复策略.MotionMaker的首次临床实验有5名脊髓损伤患者参与,包括4名非完全损伤患者和一名完全损伤患者,全部顺利完成了压腿运动与FES相结合的康复训练.
1.2直立式机器人
患者在使用直立式下肢康复机器人进行康复运动时采用站立的姿态,相对于坐卧式训练,这更加贴近于日常生活中下肢的活动方式,有利于激发患者自主地为身体提供支撑,对于恢复患肢的步行功能有很大的帮助.然而,这种方式只适用于轻度损伤患者,对于下肢运动功能完全丧失的病人,直立式训练不仅康复效果甚微,而且可能会对患肢造成二次损伤.根据体重支撑方式的不同,直立式机器人进一步划分为悬吊减重式步态训练机器人和独立可穿戴式机器人.

1.2.1悬吊减重式步态训练机器人
步态训练对于下肢运动功能障碍是非常重要且有效的康复运动手段,传统BWSTT使用悬吊机构和挽具支撑患者的部分体重,将其直立于跑步机上,理疗师手动操控患者的下肢配合跑步机的运动节奏完成步行训练,该过程费时费力.相较而言,悬吊减重式步态训练机器人可以大幅降低理疗师的人员需求和体力消耗,同时确保与传统手段相当的康复效果.所谓悬吊减重,就是通过穿戴于患者腰胸部的挽具,以及连接挽具和头顶上方支架的绳索,以提拉躯干的方式实现体重支撑,保持患者的直立姿态.至于步态训练,则主要由特定的介质与患者的双足相互作用,完成下肢的交替运动,作用介质主要分为三种,分别是脚踏板、跑步机和地面.
Gait Trainer GT I是由德国柏林自由大学(Freie Universit¨at Berlin)研制的悬吊减重式步态康复机器人(图3),并由柏林康复设备公司RehaStim完成了产品化.该设备集成了FES系统,它根据下肢的运动状态循环有序刺激下肢肌肉,辅助患者完成步态训练.但由于其采用脚踏板与患者的双足进行交互,下肢得到的力觉反馈较弱,与自然行走的感觉相差较大.此外,该机器人的步态训练策略主要强调重复连续的被动运动,而忽略了患者主动参与的重要性.GaitTrainerGTI属于较早期的下肢康复设备,世界范围内有较多关于它的临床研究实验,其结果显示,该系统的康复效果至少与传统的BWSTT步态训练方式相等同,但却显著降低了理疗师的体力消耗,节省了康复医疗资源.

Lokomat是由瑞士苏黎世大学医学院(Balgrist University Hospital)、Hocoma公司、苏黎世联邦理工学院(Eidgen¨ossische Technische Hochschule Z¨urich)以及德国Woodway公司联合开发的步态训练机器人(图4),最终由Hocoma公司进行商业化.它主要由三个部分组成,包括一对步态矫形器、跑步机和悬吊减重系统,其中每条步态矫形器包含两个独立驱动的旋转自由度,对应于髋膝关节的屈伸运动,通过矫形器和跑步机的同步配合,实现下肢的步态训练.Lokomat使用跑步机与患者的双足进行交互,相比脚踏板的作用方式,下肢可以得到更接近于自然行走的体验.此外,步态矫形器的设计考虑到了下肢的个体差异,可以针对不同的患者进行结构调整,优化了运动过程中二者之间的配合.作为同类产品中的先驱,Lokomat实现了多种主被动训练策略,满足了不同患者的康复需求,同时它也是在临床实验研究中应用最为广泛的步态训练机器人.

WalkTrainer是由瑞士洛桑联邦理工学院(Ecole Polytechnique F´ed´erale de Lausanne)机器人系统实验室研究开发的步态训练机器人(图5),与MotionMaker同为一项名为Cyberthosis康复工程的一部分,并同样由瑞士Swortec公司进行了商业化.它主要由5个模块组成,包括可全方位移动的支架平台、盆骨矫形器、悬吊减重系统、腿部矫形器以及可实时控制的FES系统.在使用WalkTrainer在进行步态训练时,患者的足部直接与地面相作用,相比于脚踏板和跑步机,这种方式提供给下肢的力觉反馈最接近于真实自然的步行.此外,步态训练中还结合了FES,刺激下肢肌肉规律有序地收缩,使其参与康复运动.该机器人系统的首次临床实验研究已经完成,有6名截瘫患者参与了为期三个月的步态训练,下肢运动功能得到了有效的康复.

1.2.2独立可穿戴式机器人
在所有的下肢康复设备中,独立可穿戴式机器人最为灵活.它通过帮助患者完成日常生活活动来实现下肢的康复训练,例如直立行走、上下楼梯和上下坡等,这样既可以方便患者的日常生活,又能达到康复训练的目的.这类机器人具备与人腿结构相类似的机械矫形器,穿戴于患者下肢,同时完成体重支撑和康复训练,有时需要使用手杖来保持活动过程中患者的平衡.
ReWalk是美国Argo Medical Technologies公司开发生产的可穿戴式下肢康复机器人(图6),可以为脊髓损伤患者提供运动训练.它由一套轻便的支撑骨架、可充电电池、传感器阵列以及安放在背包中的一套电脑控制系统组成,所谓支撑骨架是指左右两条对称的二自由度下肢矫形器,两个旋转关节分别对应髋膝的屈伸运动.该机器人使用倾角传感器检测患者上身所处的姿态,以此来推断下肢的运动状态,从而辅助患者完成步行和上下楼梯等日常生活活动.临床实验研究证明,ReWalk是一款安全稳定的康复设备,可以协助瘫痪患者实现高效率的步行活动.

1.3辅助起立式机器人
如其名称所示,辅助起立式下肢康复机器人主要是在患者起立或坐下的运动过程中提供支撑并保持平衡,训练下肢由坐到站或者由站到坐的运动功能.然而,单纯的起立训练对于下肢运动功能康复的意义并不大,因此关于该类设备的开发研究比较少.比较常见的情况是,辅助起立式机器人同时具备带驱动的可移动机械平台,在患者完成起立运动后,可以实现简单的地面行走训练.
日本高知工科大学(Kochi University of Technology)开发了一款单纯的辅助起立式下肢康复设备,它采用了一种双绳索机构,通过提拉患者躯干的方式,帮助其自然地完成坐到站的运动过程.机构中的前后两根绳索由两个独立的直流伺服电机进行驱动,分别控制训练过程中患者的位姿以及机构对患者的提拉力度.该系统能够根据力和运动传感器信号,识别出患者的主动运动意图,从而为其提供必要的支撑,相对集中地训练起立过程中最为薄弱的环节,以达到更好的康复效果.为了验证该训练系统的有效性,选择了4名正常的志愿者进行了实验,对比了有、无设备辅助两种情况下的起立训练,结果显示该机器人能够帮助被试者以安全、舒适、自然的姿态轻松地完成起立运动,有效地提高了关节的运动能力.
1.4多体位式机器人
多体位式下肢康复机器人可以为患者提供不同体位的运动训练,典型地,以融合了坐卧式和直立式特点的机器人设备为例,在训练过程中,根据具体的需要,患者既可以采用坐姿、斜躺或平躺的姿态,也可以处于站立的状态.因此,该类设备的适用范围广泛,即能为下肢力量薄弱的患者提供训练,又能辅助轻度损伤的病人完成康复运动,进而可以针对不同患者制定出全面的渐进式训练策略.
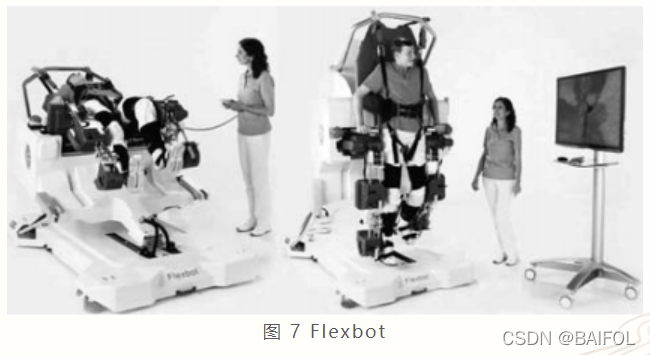
Flexbot是上海璟和技创机器人有限公司开发生产的一款多体位式下肢康复系统(图7),主要由一张床、一对二自由度的机械下肢以及一套显示系统三部分组成.它集合了坐卧式和直立式机器人的功能特点,可以帮助患者实现从身体姿态平躺到站立的康复运动训练.因此该设备的适用范围广泛,不同程度的下肢运动功能障碍患者,以及处于不同康复阶段的瘫痪病人都可以使用.开发者据此提出了一个4阶段的渐近式康复训练步骤,不同的患者可以根据自己的情况选择合适的康复阶段进行运动训练.此外,该系统还将康复训练与虚拟现实相结合,为患者提供了更加真实的运动感受,激发了他们参与训练的积极性.
2交互控制方法
机器人和患者之间的交互控制是下肢康复机器人研究中非常重要的一个方面,由于下肢康复机器人是与运动功能受损的患肢相互作用,而病人是具备自主运动意识的对象,因此机器人和患者之间的交互控制不可或缺.首先,交互控制会为患者创造一个安全、舒适、自然并且具备主动柔顺性的训练环境,避免患肢由于痉挛、颤抖等异常的肌肉活动而与机器人产生对抗,保护其不会受到二次损伤.其次,交互控制会从传感器信号中获取患者的主动运动意图,鼓励患者积极参与到运动中来,实现所谓的主动训练,从而提高康复的效果.根据获取主动运动意图时所使用的信号不同,机器人与患者之间的交互控制策略可以基本分为两类:1)基于力信号的控制方法;2)基于生物医学信号的控制方法.
2.1基于力信号的交互控制
在基于力信号的交互控制中,力信号具体是指由于肢体肌肉收缩而产生的作用于机械结构的力,即所谓的交互力.它可以通过巧妙地机械结构设计,由力/力矩传感器直接测量,也可以通过人机混合系统的动力学模型进行估计.相比于生物医学信号,力信号有更好的确定性,同时也是对患者主动运动意图较为直接的反映,因此基于力信号的交互控制相对可靠稳定.但由于交互力的获取通常需要依托机械结构,不如生物医学信号的检测来的方便灵活,所以这种交互控制方式的适用范围有限.康复机器人和患者之间的交互力控制策略中,有两种方法使用最为广泛,即力位混合控制和阻抗控制.
2.1.1力位混合控制
力位混合控制方法最先由Raibert等提出,用来解决机器人在受限环境中的控制问题,该问题可以简单地描述为在某些方向上需要对机器人进行位置控制,而在另外的方向上需要控制机构与外界的相互作用力.因此,在力位混合控制中,当机器人和外部环境相接触时,其任务空间自然地被分割为两个子空间,即位置子空间和力子空间,并在相应的子空间中完成位置和力的跟踪控制.而下肢康复机器人的交互控制目标主要是为瘫痪患者创造一个安全、舒适、自然并且具备主动柔顺性的训练环境,很少情况下需要实现精确的力轨迹跟踪,因此力位混合控制方法在患者和机器人的交互控制中并不常用.
2.1.2阻抗控制
不同于力位混合控制,阻抗控制方法注重实现康复机器人的主动柔顺,避免机构与肢体之间的过度对抗,从而为患者创造一个安全、舒适、自然的触觉接口,避免患肢再次损伤的风险.除此之外,阻抗控制还有一个优势:它的实现不依赖于外界环境运动约束的先验知识.因此,在机器人与患者之间相互作用力的控制问题上,阻抗控制有更为广泛的应用.
2.2基于生物医学信号的交互控制
在下肢康复机器人的交互控制中,有两种生物医学信号最为常用,即表面肌电(Surface electromyogram,sEMG)和脑电(Electroencephalogram,EEG).由于两种信号均通过非侵入性的方式得到,因此sEMG和EEG获取方式的可操作性强,无需专业的医护人员来完成,同时其安全性也能得到保证.
2.2.1基于sEMG的交互控制
肌电信号是指由骨骼肌产生的电活动,根据不同的测量方式,它主要分为sEMG和iEMG(Intramuscular EMG).sEMG是通过贴合在皮肤表面的电极获取的信号,而iEMG是通过针状电极插入皮肤下的肌肉组织获取的信号.相对主动力信号,sEMG有以下优势:1)sEMG的获取更为简便,不需要复杂的机械结构设计;2)力信号只是所有肌肉群综合作用的体现,而sEMG能够反映特定肌肉群的活动程度,可以对肢体的运动进行更加细致的监测和控制;3)基于sEMG的交互控制有更大的灵活性,可以根据肢体运动的协调性,实现健肢对患肢的控制;4)sEMG比主动力信号有更高的灵敏度和分辨率,对于自主肢体控制较弱的患者,使用sEMG检测主动运动意图更加合适.
基于sEMG的交互控制方法面临的挑战主要有以下几个:首先,通过人体表皮采集到sEMG信号有很大的随机性,为了能够获得高信噪比并且能够真正反映肌肉活动的信号,需要找到有效的方法对sEMG进行滤波去除干扰;其次,单一通道的sEMG只反映特定肌肉的活动情况,为了获取患者主动运动意图,通常需要综合多块肌肉的活动情况,相较而言,力信号对主动运动意图的反应则更加直接.
基于sEMG的交互控制策略基本可以分为两类:1)利用患肢本身残存的肌电,这种方法不仅激发了患者在意识上的主动参与,而且鼓励患者在运动过程中自主地控制患肢的肌肉收缩,这更有利于患肢运动功能的康复.但是对于重度瘫痪病人,他们的患肢已基本完全丧失了运动功能,无法完成自主的肌肉收缩,sEMG信号非常微弱以致难以检测,这种情况下第一种方案不适用.2)利用左右肢体或上下肢体的运动协调性,利用健康肢体的肌电信号控制瘫痪肢体的运动,这种方法虽然在患者的主动参与程度上不及第一种策略,但却为重度瘫痪病人提供了一种主动训练的方案.
2.2.2基于EEG的交互控制
EEG是通过贴合在头皮上的电极采集到的脑部的电活动,它表示的是由于大脑内部神经元之间的离子流动造成的电压波动.基于EEG的交互控制的最大优势在于它不受限于肢体残疾的程度,即便患者已完全丧失下肢的的运动功能,只要大脑能够产生运动控制信号,该方法也同样适用.该方法尤其适用于完全脊髓损伤患者,他们的大脑功能正常,但是控制信号的传递通路被切断,因而对肢体的肌肉群完全失去了控制能力,而基于EEG的交互控制相当于在身体外部重建了大脑控制信号的传递通路,使用电机、功能性电刺激设备等作为执行器,重新恢复患者对肢体运动功能的控制.
该方法局限于大脑运动控制功能正常的瘫痪患者,不适用于由中风、外伤等原因造成的脑损伤病人,因为该类患者的大脑运动功能区域已经受到损伤,因而已不能产生正常的肢体运动控制的EEG信号.其次,与sEMG信号相比,EEG对肢体运动意图的分辨性较低,有更大的随机性,表情、情绪、注意力的改变等都会轻易影响到大脑产生的EEG信号.
3结论和讨论
世界范围内关于下肢康复机器人的开发研究越来越广泛,通过前文的分析比较,总结和讨论如下:
1)下肢康复机器人在往专用化和通用化两个方向发展.一方面,坐卧式设备侧重于为下肢力量微弱的患者提供运动训练,直立式设备主要用于步态训练,而辅助起立式机器人专注于由坐到站的运动练习;另一方面,多体位式机器人则为大多数下肢瘫痪的患者提供了康复训练的解决方案.相较而言,专用设备针对性强,为特定的患者群体提供了个性化的训练策略,但是适用范围有限,而通用型机器人则具备相反的功能特性.
2)下肢康复机器人的主动训练策略愈加受到重视.被动训练强调重复连续地完成周期性运动,这有助于缓解患肢的肌肉萎缩和关节僵硬,但对于肢体运动功能的恢复却效果甚微.而主动训练则注重激发患者在康复运动过程中的自主参与意识,鼓励患者积极地控制患肢的肌肉收缩,有效地提高了运动训练的康复效果.
3)越来越多的下肢康复机器人将运动训练和FES相结合.FES是帮助瘫痪患者实现康复的有效手段,它可以独立地对患肢的肌肉进行刺激.但在下肢康复机器人系统中,FES通常与运动训练相结合,根据下肢的运动状态,规律有序地刺激相应的肌肉群,诱发患肢肌肉的被动收缩,以增强运动治疗过程中的肌肉力量,辅助患肢更多地参与到康复训练中来.
4)生物医学信号逐渐应用于机器人和患者的交互控制.与力交互方法相比,基于生物医学信号的交互控制具有更大的灵活性.基于EEG或上肢sEMG推断下肢运动意图的技术,为完全瘫痪患者的主动训练提供了潜在的可能方案.但由于生物医学信号的随机性高,从中获取准确的主动运动意图是一项很大的挑战.
5)虚拟现实技术将在康复机器人的未来发展中扮演越来越重要的角色.虚拟现实主要为机器人的康复训练带来了以下两点优势:1)这项技术为患者提供了直接的视觉反馈,使得训练过程更加直观,可以指引患者更加准确地完成运动任务;2)利用虚拟现实技术能够实现多种不同的游戏式和任务式训练策略,增加了康复训练的趣味性和针对性,从而提高患者主动参与运动训练的积极性,取得更好的康复效果.

















 777
777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









